

Military training and research center of the air force "Air force Academy"
CALCULATION OF AERODYNAMIC CHARACTERISTICS OF SUPERSONIC AIRCRAFT ASYMMETRIC CONFIGURATION WITH ACCOUNT OF DEFORMATION OF THE WING
D.V.Vereshchikov, I.K.Makarov
The article presents a method of calculating the aerodynamic characteristics of a combat aircraft with asymmetric external suspensions at supersonic flight speeds and the results of assessing its accuracy.
Key words: method of calculating, the aerodynamic characteristics, combat aircraft, supersonic flight speeds.
УДК 533.6.013
ВЛИЯНИЕ УПРУГИХ ДЕФОРМАЦИЙ И КОЛЕБАНИЙ НА ФУНКЦИОНИРОВАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ
Д.В. Верещиков, канд. техн .наук; В.К. Харченко, канд. техн .наук Военный учебно-научный центр ВВС «Военно-воздушная академия»
Показан подход к созданию систем управления новых летательных аппаратов с учетом влияние упругих деформаций и возникающих в полете колебаний планера самолета.
На начальном этапе проектирования системы управления самолет рассматривается как твердое тело. При этом считается, что упругие деформации конструкции планера являются статическими и приводят только лишь к изменению аэродинамических характеристик самолета, что учитывается коэффициентами, зависящими от скоростного напора и высоты полета (или от числа М и высоты полета). Такое предположение позволяет рассчитывать аэродинамические характеристики самолета с учетом упругих деформаций его планера с использованием, например, следующих выражений
|
|
|
cαy |
= cαy жестξ1(q,H ), |
|
|
|
mϕz |
= mϕz жестξ2(q,H ), |
где |
cαy жест |
и |
mϕz жест |
– производные коэффициентов |
аэродинамических |
сил и |
моментов, полученные в трубном |
||
|
|
|
|
59 |
эксперименте с использованием жесткой модели самолета; ξ1 и ξ2 –
коэффициенты, учитывающие упругие деформации конструкции. При этом считается, что степень деформации конструкции планера не зависит от времени и является функцией только скоростного напора, числа М и высоты полета.
Известно, что любая система управления обладает несколькими степенями свободы (перемещения, предусмотренные самой конструкцией, люфты и деформации), а также характеризуется инерционными, демпфирующими и упругими свойствами. Приведенные соображения позволяют сделать вывод о том, что система управления подвержена колебаниям, участие в которых могут принимать все или некоторые ее элементы, а сами колебания имеют различные формы, частоты и амплитуды.
Демпферы и автоматы устойчивости, широко применяемые для улучшения характеристик устойчивости и управляемости, используют измеренные с помощью ДУС и ДЛУ значения угловых скоростей и перегрузок. Динамические свойства ДУС и ДЛУ, а так же рулевых агрегатов, играющих роль исполнительных элементов демпферов и автоматов устойчивости, оказывают существенное влияние на динамические свойства системы управления.
Летчик, принимающий участие в управлении самолетом путем перемещения командных рычагов управления, обладает особыми динамическими свойствами, зависящими от большого количества факторов и так же может быть условно включен в состав динамической системы «система управления – жесткий самолет».
Вполне очевиден вывод о том, что даже на предварительном этапе проектирования системы управления необходимо проводить анализ свойств динамической системы «летчик – система управления
– жесткий самолет» на предмет ее устойчивости и наличия опасных резонансных явлений при совпадении частот собственных колебаний различных элементов системы управления, а так же самолета, как твердого тела, совершающего управляемое движение относительно центра масс.
В том случае, если удается создать достоверную математическую модель системы «летчик – система управления – жесткий самолет», то задача изучения ее динамических свойств решается широко известными и освоенными методами теории управления. Такой
60
подход, в силу сложности аналитического описания свойств рассматриваемой системы, может быть применен далеко не для всей совокупности ее элементов и не для всего многообразия целевых задач пилотирования.
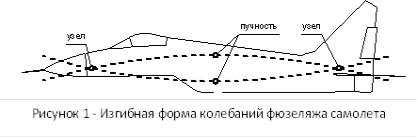
Итак, даже при предположении о том, что деформации элементов конструкции самолета являются статичными и не влияют на динамические свойства системы «летчик – система управления – жесткий самолет», их изучение сопряжено со значительными трудностями. В действительности же элементы конструкции планера подвержены разнообразным сочетаниям изгибных и крутильных форм деформаций, имеющих периодический (колебательный) характер. Так, например, для самолета МиГ-29 характерен изгибный характер колебаний фюзеляжа, причем 1-я форма колебаний имеет собственную частоту около 11 Гц, которая оказалась близка к собственной частоте кручения стабилизатора (рис. 1). На упругой линии фюзеляжа выделяются две узловые точки и пучность. Таким образом, выявление форм и частот упругих колебаний конструкции планера является весьма актуальным с точки зрения предотвращения резонансных явлений в системе «летчик–система управления–упругий самолет».
В настоящее время разработаны и, в связи со значительным ростом производительности ЭВМ, применяются на практике различные численные методы, позволяющие выявить формы и частоты собственных колебаний весьма сложных элементов авиационных конструкций и частей самолета в целом. Тем не менее, эксперименты с натурными образцами авиационных конструкций продолжают оставаться единственным достоверным способом оценки форм и частот колебаний. Такие эксперименты получили наименование «частотные испытания». Частотные испытания являются обязательным этапом в процессе подготовки любого летательного аппарата к первому вылету.
61
Методика проведения частотных испытаний предполагает размещение на внешней поверхности элементов планера датчиков, измеряющих величину линейного ускорения (акселерометров), и возбуждение гармонических колебаний конструкции с помощью электромагнитных вибровозбудителей. Наблюдение за откликом конструкции при различных частотах возбуждения позволяет выявить формы колебаний и зафиксировать резонансные всплески амплитуд. Наличие резонансного всплеска амплитуды свидетельствует о том, что частота, при которой наблюдается этот всплеск, является собственной частотой колебаний конструкции по соответствующей форме.
Целью частотных испытаний является не только выявление форм и частот собственных колебаний планера, узловых точек и пучностей, но и экспериментальное подтверждение факта отсутствия резонансных явлений при знакопеременном отклонении рулевых поверхностей с различными частотами. Тем самым подтверждается состоятельность конструкции с точки зрения предотвращения рулевых форм флаттера.
В том случае, если в результате математического или полунатурного моделирования, а так же при проведении частотных испытаний обнаружено совпадение (или близость) собственных частот колебаний элементов системы «летчик – система управления – упругий самолет», то в распоряжении конструкторов имеется несколько путей для решения проблемы возникновения резонансных явлений:
1. Увеличение или уменьшение частот собственных колебаний элементов конструкции для исключения их совпадения («разведение» частот). Это достигается, соответственно, увеличением или уменьшением жесткости конструктивных элементов.
62

2. Применение демпферов (виброизоляторов), которые снижают амплитуды колебаний элементов конструкции планера и системы управления, происходящих на резонансных частотах, и уменьшают значения частот собственных колебаний.
3.Изменение типа и параметров командных рычагов управления,
атак же систем их загрузки для адаптации к ограниченным возможностям летчика, включенного в контур управления.
4.Включение в алгоритмы функционирования
электродистанционных систем управления фильтров, ограничивающих уровень сигналов на низких и высоких частотах или в некотором диапазоне (диапазонах) частот. Практика синтеза эффективных алгоритмов для цифровых систем управления современных самолетов позволяет выделить чаще всего используемые фильтры:
(Tp +1)−1 - фильтр, пропускающий сигналы только низких частот и подавляющий сигналы высоких частот (низкочастотный фильтр);
- |
T1p |
- фильтр, пропускающий сигналы только высоких |
T2 p +1 |
частот и подавляющий сигналы низких частот (высокочастотный фильтр);
- |
|
1 |
|
|
- фильтр, пропускающий сигналы в |
(T p)2 |
+ 2T ξ |
2 |
p +1 |
||
1 |
2 |
|
|
||
заданном диапазоне частот и подавляющий сигналы при меньших и больших частотах (полосовой или селекторный фильтр);
|
(T p)2 |
+ 2T ξ |
2 |
p +1 |
|
|
- |
1 |
2 |
|
|
- фильтр, подавляющий сигналы в заданном |
|
(T p)2 |
+ 2T ξ |
3 |
p +1 |
|||
|
3 |
4 |
|
|
|
|
диапазоне частот и пропускающий сигналы при меньших и больших частотах (фильтр-пробка или режекторный фильтр).
Фильтры, применяемые для компенсации амплитудных всплесков, вызванных упругими колебаниями элементов конструкции планера и системы управления называются фильтрами упругих колебаний (ФУК) и могут иметь более сложную, комбинированную структуру. Так, например, в продольном канале цифровой электродистанционной системы управления самолета МиГ-29К в
63
линии сигнала скорости тангажа применяется фильтр с передаточной функцией
(T p)2 |
+ 2T ξ |
2 |
p +1 |
|
|
1 |
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
, |
|
(T p)2 |
+ 2T ξ |
3 |
p +1 |
(T p)2 |
+ 2T ξ |
4 |
p +1 |
|||
3 |
4 |
|
|
|
5 |
6 |
|
|
||
обладающий свойствами полосового фильтра и фильтра-пробки. Следует отметить, что преимущества в области исключения
резонансных явлений, получаемые в результате применения фильтров различной структуры омрачаются недостатком, заключающимся в увеличении запаздывания сигнала управления, проходящего от командного рычага управления до рулевой поверхности.
Еще одним заслуживающим внимание вопросом, связанным с влиянием упругих деформаций и колебаний на функционирование систем управления, является выбор рационального места размещения датчиков ДЛУ и ДУС на самолете.
Если разместить ДЛУ, измеряющий нормальную перегрузку ny ,
в районе центра масс самолета, то он неизбежно оказывается в области пучности упругой линии фюзеляжа (рис. 1). Это приводит к тому, что ДЛУ начинает измерять не только ускорение, а следовательно, и перегрузку в районе центра масс самолета, но и дополнительную составляющую ускорения, вызванного колебаниями упругой линии фюзеляжа. Таким образом, ДЛУ следует размещать в какой-нибудь из двух узловых точек. Выбор задней узловой точки вряд ли можно признать целесообразным в силу близкого размещения двигателей силовой установки, работа которых на различных режимах приводит к появлению локальных упругих деформаций и колебаний элементов конструкции. Выбор остается за передней узловой точкой, расположенной на расстоянии lЦМ от центра масс самолета.
Размещенный в передней узловой точке ДЛУ, в случае наличия углового ускорения по тангажу ωz , измеряет перегрузку ny ДЛУ ,
значение которое отличается от значения перегрузки в районе центра масс самолета nyЦМ . Эта разница тем больше, чем дальше датчик
вынесен от центра масс и чем больше величина углового ускорения самолета ωz
64

ny ДЛУ = nyЦМ + lЦМgωz .
Приведенное выражение следует учитывать при формировании закона работы автомата продольной устойчивости по нормальной перегрузке
ny |
|
|
|
l |
ЦМ |
ω |
z |
|
|
ny |
|
|
|
|
|||
∆ϕАУ(ny ) = kϕ |
∆nyЦМ |
= kϕ ny ДЛУ |
− |
|
|
|
|
−1 . |
|
g |
|
||||||
|
|
|
|
|
|
|
||
Место установки ДУС так же выбирается с учетом характера упругих деформаций и колебаний конструкции планера. Если ДУС, предназначенный для измерения скорости тангажа ωz разместить в
узловых точках, то датчик будет измерять не только ωz , но и угловую
скорость изгибных деформаций упругой линии фюзеляжа. В таком случае демпфер тангажа будет отклонять рулевую поверхность по ложному («паразитному») сигналу. Для устранения влияния упругих деформаций ДУС устанавливают в районе пучности.
Таким образом, влияние упругих деформаций и возникающих в полете колебаний планера самолета, необходимо учитывать при создании нового летательного аппарата и его системы управления.
Литература
1.Пашковский И.М. Устойчивость и управляемость самолета. – М.: Машиностроение, 1975. 328 с.
2.Шумилов И.С. Системы управления рулями самолетов. – М.: Изд-во МГТУ им. Баумана, 2009. 469 с.
Military training and research center of the air force "Air force Academy"
THE EFFECT OF ELASTIC DEFORMATION AND VIBRATIONS ON THE OPERATION
OF THE CONTROL SYSTEM
D.V. Verechikov, V.K. Harchenko
An approach to the development of control systems for new aircraft taking into account the influence of elastic deformations and oscillations of the airframe arising in flight is shown.
Key words: aircraft control system, elastic deformation, vibrations.
65