

материалы и высокие технологии, IV Международная научная конференция, Тиват, Черногория, 4-10 июля 2016г.: тезисы докладов.
– Иваново: Ивановский государственный химико-технологический университет, 2016. – 181с., с. 57-59
Работ а выполнена в рамках реализации Государст венного задания №9.11295.2018/10.11 по т еме «Разработ ка т ехнологии высокоизносост ойких покрыт ий подшипников скольж ения со сверхмалым коэффициент ом т рения на основе соединений никельбор»
1Voronezh State Technical University
2Voronezh State University
NEW DECISIONS IN THE CONSTRUCTIONOF THE SLIDE BEARING WITH INCREASED WORKING RESOURCE 1Yu.N. Shalimov;1V.I. Korolkov;
2B.M. Darinsky;1A.P.Budnik;1A.V. Russu
The article provides a detailed overview of the main types and designs of bearings. It is shown that the production of basic machine-building machinery is carried out in the most industrialized countries. The work pays attention to sliding bearings, ensuring the efficiency of powertrain systems. The features of the bearings by types of lubricants and the interaction in the shaft-bearing system are considered. A new solution based on lead bronze and Ni-B alloy materials instead of electroplating chromium is proposed.
Key words: sliding bearing, tribology, lubricants
УДК 621.7.024.2
БЕСПИЛОТНЫЙ ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ПОВЫШЕННОЙ МАНЕВРЕННОСТИ
Р.Н. Степанов; П.В. Рачков; А.С. Грешнов; В.Б. Кровяков, старший научный сотрудник
Военный учебно-научный центр ВВС «Военно-воздушная академия»
Важнейшим качеством летательных аппаратов (ЛА) является маневренность - способность ЛА изменять положение в пространстве,
322
скорость, высоту и направление полёта за определенный промежуток времени.
Любой ЛА имеет ограничения по маневренности, которые определяются:
аэродинамическими свойствами ЛА. Расположение крыла, горизонтального и вертикального оперения относительно фюзеляжа, стреловидность крыла самолета, количество и расположение несущих винтов на вертолете - все это непосредственно влияет на маневренность ЛА;
прочностными характеристиками. Резкие маневры на высоких скоростях вызывают большие перегрузки, приводящие к разрушению конструкции ЛА;
физическими и психологическими возможностями человеческого организма. Большие перегрузки отрицательно сказываются на здоровье пилота и его возможности управлять ЛА.
В связи с тем, что беспилотный летательный аппарат ( БЛА) не имеют экипажа на борту, то их маневренные возможности ограничиваются только аэродинамическими и прочностными характеристиками БЛА. Именно БЛА являются объектом, на котором можно отрабатывать и реализовывать маневры, связанные с большими перегрузками, выполнение которых невозможно на пилотируемых ЛА.
Винтокрылые БЛА при решении определенного круга задач имеют некоторые несомненные преимущества перед БЛА самолетного типа и традиционной вертолетной схемы:
возможность зависания вблизи требуемых объектов, что позволяет осуществлять работу, недоступную для других типов БЛА; возможность осуществления требуемой работы, например,
применения бортового вооружения, с малых расстояний; возможность осуществления посадки и взлета на
неподготовленных площадках, отсутствие необходимости в организации старта и посадки;
отличаются большей устойчивостью в полете и большей грузоподъемностью, чем БЛА вертолетного типа традиционной схемы.
К существенным конструктивным недостаткам существующих мультикоптеров следует отнести:
323
размещение полезной нагрузки вне фюзеляжа; ограниченный диапазон управления рабочим органом полезного
оборудования.
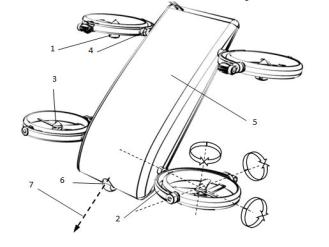
Представляемый мультикоптер [1, 2] имеет фюзеляж с установленным в нем стационарным полезным оборудованием, необходимое количество средств тяги с несущими винтами, каждое из которых расположено на раме, установленной на соответствующей выносной балке корпуса. Средства тяги установлены с возможностью как совместного, так и раздельного друг от друга поворота в рамах на угол не менее 1800, а рамы с возможностью как совместного, так и раздельного поворота вокруг оси балок на угол 3600. Винты установлены с возможностью как совместного, так и раздельного друг от друга изменения силы и направления тяги.
На рисунке 1 средства тяги 1 установлены на рамах 2 с возможностью поворота плоскости винтов 3 относительно рам. Рамы 2 установлены на выносных балках 4 фюзеляжа 5 с возможностью поворота в перпендикулярной балкам плоскости. Несущие винты 3 установлены с возможностью изменения скорости и направления вращения и (или) лопасти винтов 3 установлены с возможностью изменения их
Рисунок 1 – Конструктивное устройство мультикоптера
324
Согласованные поворот относительно фюзеляжа 5 плоскостей несущих винтов 3 и изменение силы и направления их тяги обеспечивается координированным посредством командной системы управления поворотом средств тяги 1 в рамах 2, рам 2 вокруг балок 4 фюзеляжа, изменением шага винтов 3 и (или) скорости и направления их вращения. Это создает суммарную составляющую векторов тяги каждого средства тяги 1, позволяющую совершать полет квадролета по любой заданной траектории и зависание при сохранении любой заданной пространственной ориентации фюзеляжа, следовательно, при любой заданной линии наведения 7 рабочего органа 6 полезного оборудования, стационарно установленного в фюзеляже.
Управление мультикоптером по тангажу, рысканью, крену осуществляется как известными приемами для управления мультикоптерами – изменением силы тяги несущих винтов, так и с использованием новых возможностей, определяемых новыми конструктивными особенностями представленного устройства – изменением направления тяги несущих винтов за счет поворота плоскости винтов относительно фюзеляжа [3].
На рисунке 2 представлены манипуляции с управлением ориентацией фюзеляжа мультикоптера.
Побочным, но достаточно важным преимуществом представленного мультикоптера является то, что возможность неограниченной ориентации фюзеляжа относительно плоскости винтов средств тяги позволяет поддерживать подъемную силу без потери устойчивости при одном работающем движителе.
Представленный мультикоптер может осуществлять наведение рабочего органа, интегрированного в фюзеляж стационарного оборудования при облете наземных и воздушных объектов (или при зависании в их близости) в неограниченном диапазоне по горизонтали и вертикали.
325
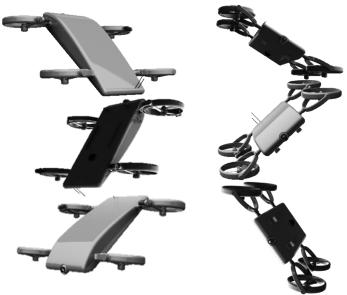
а) б) Рисунок 2 – Управление ориентацией фюзеляжа: а) по тангажу; б) по крену
Преимущества боевого применения предложенной конструкции БЛА представлены на рисунке 3.
На одновинтовом вертолете с хвостовым винтом выдерживание отрицательного угла тангажа при заходе на цель приводит к разгону, уходу от цели и новым заходам на нее, что снижает вероятность поражения цели и позволяет противнику предугадать дальнейшую траекторию движения вертолета (рисунок 3а).
Одно из преимуществ двухвинтовой соосной схемы вертолета - возможность выполнения ряда манёвров, мало доступных вертолётам с одним несущим винтом. Например, вертолету Ка-50 доступен на больших скоростях полёта элемент «воронка», когда вертолёт, поддерживая отрицательный угол тангажа 30° — 35° и сохраняя ориентацию на цель, постоянно маневрирует относительно неё по азимуту, осуществляя боковое скольжение со скоростью 100—180 км/ч (рисунок 3б). Тактический смысл применения «воронки»
326

заключается в том, что при ее выполнении вертолет может длительное время держать в зоне прицеливания наземные цели и производить по ним стрельбу, несмотря на отрицательный угол тангажа.
а) б)
в)
Рисунок 3 –Атака наземной цели:
а) вертолетом одновинтовой схемы; б) с использованием маневра «воронка» вертолетом соосной двухвинтовой схемы;
в) мультикоптером предложенной конструкции
Конструкция представленного мультикоптера в сравнении с элементом «воронка» позволяет длительное время держать в зоне прицеливания наземные объекты при его более непредсказуемом положении относительно цели (рисунок 3в). При этом траектория движения мультикоптера описывается пространственной полусферой, с возможностью нахождения БЛА в любой ее точке с разными углами тангажа, рысканья, крена. Конструкция мультикоптера позволяет ему так же и зависать в любом из представленных на рисунке 6в положений, расширяя возможности выполнения разного рода задач.
327
Взлет-посадка может производиться с неподготовленных площадок со сложным рельефом местности. То есть он не требует при эксплуатации дорогостоящей дополнительной инфраструктуры.
При этом управляющий им оператор может находиться на значительном удалении от места боевых действий, а жизненно важные элементы конструкции БЛА могут быть защищены от стрелкового оружия противника достаточно легким материалом, аналогичным материалу бронежилетов личного состава (кевлар, тварон и пр.).
При работе на столь малой высоте БЛА может быть оснащен традиционными для сухопутных боевых подразделений средствами маскировки, такими как дымовая завеса.
Подобное оснащение сделает представленный мультикоптер эффективным средством поддержки подразделений сухопутных войск, находящихся в непосредственном соприкосновении с противником. Столь же эффективным может быть его применение при выполнении антитеррористических операций в лесных, горных и городских условиях. Существенными преимуществами он будет обладать при решении задач борьбы в условиях конфликтов малой интенсивности со слабо вооруженными формированиями, к примеру, партизанскими.
Литература
1.Кровяков В.Б., Бирюков М.И. Квадрокоптер. Патент РФ на изобретение № 2547050. Бюл. № 10. 2015.
2.Кровяков В.Б., Ильинов Е.В., Хакимов Т.М. Летательный
аппарат. Заявка на выдачу патента РФ на изобретение № 2016135162 от 31.08.2016 г.
3. Коротеев А.Ю., Ялпаев А.А. Фимушин Е.С., Кровяков В.Б. Перспективный высокоманевренный беспилотный винтокрылый летательный аппарат. Сборник научных трудов II тура XVII Всероссийской научно-технической конференции и школы молодых ученых, аспирантов и студентов «Авиакосмические технологии» (АКТ-2016) 12-14 октября 2016 г. ВГТУ, г. Воронеж. 139 с. С 16-23.
328
Military training and research center of the air force "Air force Academy"
THE PILOTLESS ROTARY-WING FLYING
VEHICLE OF THE RAISED MANOEUVRABILITY
R.N. Stepanov, P.V.Rachkov, A.S. Greshnov, V.B. Krovyakov
A promising design of highly maneuverable unmanned aerial vehicle, as well as by the example of maneuver "funnel" a comparison of the developed quadcopter helicopters of single-rotor and coaxial.
Key words: maneuverable, funnel, helicopter, coaxial.
УДК 621.7.024.2
УСТРОЙСТВО ЗАЩИТЫ ТЕХНИЧЕСКИХ ОБЪЕКТОВ ОТ МЕХАНИЧЕСКОГО ВОЗДЕЙСТВИЯ ПОРАЖАЮЩИХ
ЭЛЕМЕНТОВ
1М.В. Трофимчук; 1В.Б. Кровяков, старший научный сотрудник; 2Ю.Д. Брюсов; 1И.А. Кожевников
1Военный учебно-научный центр ВВС «Военно-воздушная академия» 2Краснодарское высшее военное авиационное училище летчиков
Устройство предназначено для повышения боевой живучести подвижных и неподвижных технических объектов, например, летательных аппаратов, автомобильной техники, инженерных сооружений при воздействии высокоскоростных элементов дистанционных средств поражения.
При обеспечении заданного уровня боевой живучести защищаемого объекта одной из важнейших задач является сохранение тактико-технических характеристик объекта без существенного увеличения весовых и габаритных параметров броневой защиты [1].
Устройство состоит из гибкой преграды, закрепленной по периметру участка обшивки объекта с внутренней стороны в зоне расположения жизненно важных агрегатов или живых организмов, при этом гибкая преграда установлена в ненатянутом состоянии и ее площадь не менее, чем на 15% превышает площадь защищаемого участка, рисунок 1 [2].
329
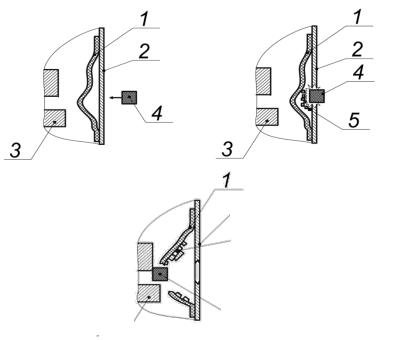
Рисунок 1 – схема работы изобретения 1 - гибкая преграда; 2 - участок обшивки;
3 - защищаемый агрегат; 4 - поражающий элемент.
На рисунке 2 представлена кинематическая схема, иллюстрирующая последовательность взаимодействия поражающего элемента и защищаемого с использованием предлагаемого устройства объекта.
При движении к участку 2 обшивки объекта защиты (рисунок 2а) поражающий элемент 4 имеет первоначальный импульс
I0ПЭ = m0ПЭV0ПЭ , где m0ПЭ – масса поражающего элемента, V0ПЭ
– его скорость при приближении к обшивке (начальная скорость). Участок 2 обшивки при соприкосновении с поражающим элементом 4 (рисунок 2б) воспринимает на себя часть его ударной энергии, под воздействием ударного нагружения элементом 4 разрушается, дробится на вторичные осколки 5. При этом элемент 4 теряет скорость до значения V1ПЭ<V0ПЭ , импульс его ударного воздействия
уменьшается до величины I1ПЭ = m0ПЭV1ПЭ < I0ПЭ . Вторичные
осколки 5 получают импульс I1ВО = mВОV1ВО , где mВО – масса вторичного осколка, V1ВО – его скорость. При этом, за счет затрат
энергии на разрушение поражающим элементом обшивки, суммарный
импульс вторичных осколков ∑I1ВО < I0ПЭ . Далее поражающий элемент 4 вместе с образовавшимися вторичными осколками 5 продолжает движение к гибкой преграде 1 устройства.
330
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
а) |
|
|
|
|
|
3 |
|
|
|
|
||||
3 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2
5
34 в)
Рисунок 2 – Кинематическая схема механического воздействия поражающих элементов на защищаемый объект
Гибкая преграда 1 устройства, соприкоснувшись с поражающим элементом 4 (рисунок 2в), гасит его скорость до нулевого значения
V2ПЭ = 0, соответственно погасив |
и импульс |
до I2ПЭ = 0, |
или |
|||
существенно уменьшает скорость до значения |
V2ПЭ < V1ПЭ < V0ПЭ , |
|||||
соответственно |
уменьшая |
и |
импульс |
до |
значения |
|
I2ПЭ = m0ПЭV2ПЭ < I1ПЭ < I0ПЭ . |
|
Вторичные |
осколки |
5 |
либо |
|
полностью теряют свою энергию на гибкой преграде 1 устройства до
значения |
I1ВО = 0, либо большая часть |
их энергии рассеивается, |
||||
снижая |
их |
ударное воздействие |
на защищаемые |
агрегаты |
3 |
|
I2ВО < I1ВО , |
а ∑I2ВО << ∑I1ВО за |
счет |
уменьшения |
скорости |
и |
|
количества вторичных осколков, часть из которых остается на гибкой
331
преграде 1, и уменьшения энергии прорвавшихся сквозь преграду 1 осколков).
Данные обстоятельства приводят к снижению суммарного импульса поражающего элемента 4 и вторичных осколков 5 до
значения IΣ = I2ПЭ + ∑I2ВО < IПред , которого не достаточно для пробития защищаемых агрегатов 3 объекта. Жизненно важные агрегаты 3 получают незначительные повреждения, не приводящие к срыву выполнения заданных функций. Таким образом, повышается боевая живучесть защищаемого объекта при воздействии поражающих элементов по его функциональным агрегатам.
Преимуществом устройства является возможность его применения как к отдельным элементам конструкции защищаемых объектов, например, для летательного аппарата – мотогондолам, навесным контейнерам, фюзеляжу в целом, так и локально – для защиты жизненно важных агрегатов и пространства, занимаемого личным составом.
Литература
1.В. Михеев. Ми-8. 40 лет. Полет нормальный. Полигон-пресс. 2001г. 52 с.
2.Трофимчук М.В., Кровяков В.Б. и др. Патент РФ № 2628415 на
изобретение «Устройство защиты технических объектов от механического воздействия поражающих элементов», МПК F 41H 5/00, дата гос. регистрации 16.08.2017.
1Military training and research center of the air force "Air force Academy"
2Krasnodar higher military aviation school of pilots
THE DEVICE OF PROTECTION OF TECHNICAL OBJECTS FROM MECHANICAL INFLUENCE OF ATTACKING ELEMENTS
1Trofimchuk M. V,1Krovjakov B.B.,
2Brjusov J.D.,1Kozhevnikov I.A.
The device is intended for increasing of fighting viability of mobile and motionless technical objects, for example, flying machines, the automobile machinery, engineering constructions at influence of highspeed elements of distance means of an attack.
Key words: fighting viability, protection, an armor.
332