

The article presents one of the possible variants of the projected lowthrust rocket engine which will be assembled with selective laser sintering (SLS-method). Fire tests will be carried out in a specialized armored vehicle, capable of ensuring the safety and protection of personnel against the factors arising from the destruction of the tested products. The usage of liquid propellant rocket propulsion engine as a propulsion system for lightweight missiles, in comparison with the traditional method of producing rocket engines, allows to reduce the cost of its making and firing and also to ensure the possibility of cluster launches.
Key words: rocket engine, liquid propellant engine, low thrust engine, rocketry, selective laser sintering, additive manufacturing
УДК 629.735.015.3
СХЕМЫ УПРАВЛЕНИЯ НЕСУЩИМИ ВИНТАМИ ВЕРТОЛЕТОВ И ИХ ОСОБЕННОСТИ
С.М. Баранцев, канд. техн. наук Военный учебно-научный центр ВВС «Военно-воздушная академия»
В работе описаны схемы управления несущими винтами одновинтовых и соосных вертолетов. Приведены отличительные особенности каждой из схем управления.
Управление вертолетом в пространстве осуществляется изменением направления тяги несущего винта (НВ) и силы тяги рулевого винта (РВ). Управляют направлением и силой тяги НВ с помощью автомата перекоса, который представляет собой устройство управления общим (изменяющим силу тяги) и циклическим (изменяющим направление тяги) шагом НВ. Основное назначение автомата перекоса - передача движения с неподвижных элементов системы управления на вращающиеся лопасти НВ [1].
Все современные вертолеты по количеству несущих винтов можно разделить на одновинтовые и двухвинтовые. В свою очередь, двухвинтовые можно разделить на вертолеты соосной, продольной и поперечной схем [2].
Одновинтовая схема НВ состоит из несущего и рулевого винтов. Несущий винт создает подъемную и движущую силы. Рулевой винт
350
(РВ) предназначен для уравновешивания реактивного момента НВ (исключения вращения корпуса вертолета относительно НВ), обеспечения управляемости и устойчивости вертолета одновинтовой схемы. РВ установлен на концевой балке. Вращение РВ осуществляется от главного редуктора валом хвостовой трансмиссии через промежуточный и хвостовой редукторы. Диаметр РВ меньше диаметра НВ, а частота вращения РВ больше. Вращение РВ синхронизировано с НВ - при изменении скорости вращения НВ, соответственно изменяется скорость вращения РВ. Устройство типа автомата перекоса у РВ отсутствует, а управляют силой тяги РВ изменением угла установки лопастей. Углом установки лопастей управляют при помощи педалей из кабины экипажа, обеспечивая поворот вертолета по курсу. В прямолинейном полете направление силы тяги РВ перпендикулярно направлению полета.
К достоинствам одновинтовой схемы относят относительную простоту и дешевизну конструкции. Одним из главных недостатков одновинтовой схемы является срыв потока на отступающей лопасти, проявляющийся на больших скоростях. Существует возможность перехлеста лопасти НВ с хвостовой балкой на некоторых одновинтовых вертолетах. Данная опасность становится реальна при нахождении вертолета на земле в случаях: раскрутки и остановки НВ в условиях сильного ветра и взаимного влияния НВ соседних вертолетов на стоянке; при действии на НВ нисходящего потока от другого вертолета. В полете такая опасность возникает вследствие интенсивного торможения резким переводом вертолета из пикирования в кабрирование, турбулентностью атмосферы и режимом вихревого кольца. Для избежания этого, не рекомендуется снижать обороты НВ ниже установленных пределов для сохранения допустимого угла конуса лопасти НВ.
Соосная система НВ двухвинтового вертолета состоит из двух винтов одинакового диаметра, расположенных на одной оси и вращающихся в разные стороны. Реактивные моменты верхнего и нижнего винтов взаимно уравновешиваются, благодаря чему отпадает необходимость РВ. Верхний и нижний винты в соосной схеме разнесены по вертикали для исключения схлестывания лопастей. Верхний винт засасывает воздух из безграничного пространства и создает струю, отбрасываемую на нижний винт. Воздействие струи
351
верхнего винта вызывает уменьшение угла атаки и соответственно, подъемной силы нижнего винта. Вследствие сужения нисходящего потока, отбрасываемого верхним винтом, концевые участки лопастей нижнего винта работают на режимах, аналогичных верхним лопастям, при этом, концевые участки лопастей нижнего винта засасывает некоторое количество воздуха из окружающего пространства. Соосный НВ вовлекает в движение воздушную массу на 20 % большую, чем НВ вертолета одновинтовой схемы. Аэродинамическая эффективность соосного винта всегда на 3…10 % выше, чем у НВ вертолета одновинтовой схемы. Диаметр соосного НВ несколько меньше чем одновинтового, поэтому, в режиме висения при равных условиях, соосный вертолет требует несколько большей мощности двигателей, чем одновинтовой. Практически же отсутствие РВ и хвостовой трансмиссии обеспечивает соосному вертолету значительно меньшую массу собственной конструкции и большую массу полезной нагрузки при равной с сопоставимым одновинтовым вертолетом полетной массе, а отсутствие затрат мощности двигателя на привод РВ, больший статический потолок при одинаковой мощности двигателей и полетной массе. При висении на одинаковой малой высоте от колес шасси до поверхности земли, положительное влияние воздушной подушки оказывается меньшим, чем для одновинтового вертолета, что объясняется более высоким расположением в целом соосных НВ, и большим экранирующим влиянием фюзеляжа. В режиме горизонтального полета на высокой скорости соосный НВ имеет большее лобовое сопротивление, чем одновинтовой НВ, что снижает максимальную скорость полета вертолетов соосной схемы. Путевое управление вертолетом (повороты и развороты) осуществляется в основном дифференциальным изменением реактивных моментов несущих винтов и отклонением рулей направления (располагаемых на киле), а продольно-поперечное управление — одновременным изменением направления тяги верхнего и нижнего винтов. Важной особенностью соосного вертолета является установка двух автоматов перекоса на одной колонке.
352
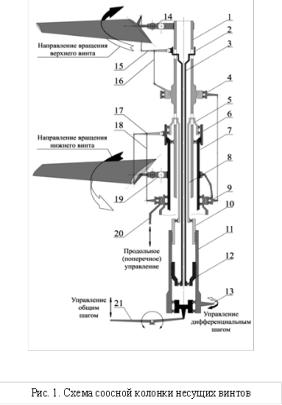
Основными элементами конструкции колонки, необходимыми для понимания принципа ее работы, являются: 1 - вал верхнего винта, 2 – ползушка верхнего винта, 3 - тяга ползушки верхнего винта, 4 - тарелка автомата перекоса верхнего винта, 5 - ползушка нижнего винта, 6 - опорный элемент рычага лопасти нижнего винта, 7 - вал нижнего винта, 8 - тяга ползушки нижнего винта, 9 - тарелка автомата перекоса нижнего винта, 10, 12 - втулки, 11 - стакан, 13 - рычаг управления дифференциальным шагом винтов, 14 - шарнирный узел лопасти верхнего винта, 15 - рычаг лопасти верхнего винта, 16 - тяга рычага лопасти верхнего винта, 17 - рычаг лопасти нижнего винта, 18 - тяга рычага лопасти нижнего винта, 19 - шарнирный узел лопасти нижнего винта, 20 - рычаг продольного (поперечного) управления, 21 - рычаг управления общим шагом винтов.
353
При отклонении ручки влево или вправо тяга поперечного управления отклонит в соответствующем направлении тарелки автоматов перекосов. Так осуществляется управление циклическим шагом НВ.
Принципиальное значение для соосной несущей системы имеет расстояние между втулками верхнего и нижнего винтов. Увеличение этого расстояния утяжеляет и усложняет конструкцию колонки НВ, ухудшает устойчивость вертолета на земле, уменьшение же данной величины вызывает опасное сближение лопастей винтов. Поэтому разработчики добиваются компромиссного решения, наилучшим образом удовлетворяющего противоречивым требованиям аэродинамики, динамической прочности и надежности вертолета.
При проектировании вертолета и определении его параметров необходимо осуществлять выбор на основе анализа достоинств и недостатков каждой из схем, для нахождения рационального решения, в зависимости от назначения. Статья будет полезна обучающимся по авиационным специальностям, при выполнении курсового и дипломного проектирования.
Литература:
1.Далин В.Н., Михеев С.В. Конструкция вертолетов, Учебник- М: Издательство МАИ, 2001 г-352 с
2.Есаулов С.Ю., Бахов О.П., Дмитриев И.С. Вертолет, как объект
управления. М.: Машиностроение, 1977, 192 с
Military training and research center of the air force "Air force Academy"
HELICOPTER LIFTING PROPEELLER CONTROL
CONFIGURATION AND THEIR PECULIARITIES
S.M. Barantcev
The article contains lifting propeller control configuration of singlerotor and coaxial-rotors helicopters. There are also differential peculiarities of each of configurations.
Key words: coaxial-rotors helicopter configuration, lifting propeller,antitorque propeeller
354