

Одновременно определяются координаты идентичных точек на полученном изображении в связанной системе координат БЛА
(Pix ,Piy ,Piz ) , где i=A,B,C для расчета относительных координат БЛА [1].
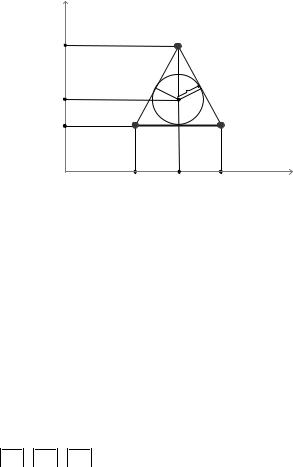
Относительные координаты БЛА (D0,H0,Z0) определяются на
основе способа представления идентичных точек земной поверхности (A, B, C) в виде треугольника и вписанной в него окружности (сферы для OXYZ) (рассматривается для плоскости OYZ в связанной системе координат БЛА), схема которого отображена на рисунке 2 [2].
Y |
|
|
P2y |
|
B |
|
|
|
|
|
rD |
PDy |
|
D |
|
|
|
P1y, P3y |
A |
C |
|
||
|
|
0 |
P1z |
P2z, PDz |
P3z |
Z |
|
Рисунок 2 − Схема измерения по методу вписанной окружности
Piy, Piz − координаты точек A (i = 1), B (i = 2), C (i = 3) в связанной с БЛА системе координат; PDy, PDz − координаты базового
ориентира D в связанной с БЛА системе координат
Координатам центра вписанной окружности (сферы) соответствуют следующие выражения:
D = |
BC |
|
P1x + |
|
AC |
|
|
P2x + |
AB |
|
|
P3x , |
|||||||||||||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BC |
AC |
AB |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
P1y + |
|
|
|
|
|
|
P2y + |
|
|
|
|
|
|
|
P3y |
|
||||||||||||||
H0 = |
|
BC |
|
AC |
|
|
AB |
|
, |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
BC |
AC |
AB |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
P1z + |
|
|
|
|
|
|
|
P2z + |
|
|
|
|
|
P3z |
|
|
|||||||||||||||
Z0 = |
|
BC |
|
|
AC |
|
|
|
|
AB |
|
|
, |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
BC |
|
AC |
|
AB |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
где AB , BC , AC − модули векторов AB, BC, AC.
396
Далее производится расчет текущих географических координат БЛА (Xтек ,Yтек ,Zтек ) на основе географических координат базового
ориентира D (X D ,YD ,ZD ) и относительных координат (D0,H0,Z0) БЛА. Полученные координаты вводятся в БИНС для ее коррекции.
Разработанный алгоритм позволит с высокой точностью определять координаты местоположения БЛА для коррекции БИНС. Преимуществами предложенного способа получения навигационной информации на основе ОЭС и ЭКМ являются автономность, пассивность и точность. Но ввиду невозможности применения данного способа над безориентирной местностью (водная поверхность, пустыня, лес и т.п.) его применение ограничивается только коррекцией БИНС.
Литература 1. Лопаткин Д. В., Ипполитов С.В., Губарь М.Н. Использование
триангуляционного метода в задачах межсамолётной навигации / Д.В. Лопаткин, С.В. Ипполитов, М.Н. Губарь // XIV Наука. Промышленность. Оборона. Сб. тезисов докладов по материалам ВНТК (Новосибирск, 24–26 апреля 2013 г.). – Новосибирск. НГТУ, 2013. С. 350–353.
2. Лопаткин Д.В., Ипполитов С.В. Алгоритм определения параметров относительного положения беспилотного летательного аппарата в группе. XXXIX Гагаринские чтения / Д.В. Лопаткин, С.В. Ипполитов // Сб. тезисов докладов по материалам Международной молодёжной научной конференции (Москва, 9–13
апреля 2013г.), том 3. – М.: МАТИ, 2013. С. 88.
Military training and research center of the air force "Air force Academy"
CORRECTION ALGORITHM OF THE STRAPDOWN INERTIAL NAVIGATION SYSTEM BASED ON THE OPTOELECTRONIC SYSTEM AND ELECTRONIC TERRAIN MAP
A.V. Sizov, S.V. Ippolitov, A.Y. Savchenko
Correction algorithm of the strapdown inertial navigation system, which implements a method for determining the coordinates of the location of an unmanned aircraft based on an optoelectronic system and an electronic map of the terrain, is developed.
397
Key words: strapdown inertial navigation system, optoelectronic system, electronic terrain map.
УДК 681.518.5
ПОДСИСТЕМА ДИАГНОСТИКИ СИСТЕМЫ УПРАВЛЕНИЯ ФУНКЦИОНАЛЬНОЙ ИНФОРМАЦИОННОЙ
ИЗБЫТОЧНОСТЬЮ В КОМПЛЕКСЕ БОРТОВОГО ОБОРУДОВАНИЯ
Савченко А.Ю., канд. техн. наук; Букирёв А.С., курсант; Васильченко А.С., адъюнкт; Озеров Е.В., канд. техн. наук Военный учебно-научный центр ВВС «Военно-воздушная академия»
Предложен подход к построению интеллектуальной диагностической системы, обеспечивающей управление функциональной информационной избыточностью в комплексе бортового оборудования.
Эффективное управление функциональной информационной избыточностью возможно реализовать в КБО, построенном по принципу интегрированной модульной авионики (ИМА) [1, 2]. Архитектура КБО при этом представляет собой распределенные в пространстве датчики информации, унифицированные вычислители и исполнительные устройства, связанные одной линией передачи данных.
В работе [2] система управления избыточностью включает две подсистемы:
3)мониторинга (обнаружения, локализации) отказов и повреждений;
4)реконфигурации структуры БРЭО в реальном времени. Данная структура должна быть несколько модифицирована под
систему управления функциональной информационной избыточностью и будет включать подсистемы:
1)диагностики (определение технического состояния элементов системы и локализация отказавшего элемента);
2)информационной реконфигурации (изменение порядка
обработки и передачи информации в КБО с целью сохранения его работоспособности при отказе отдельных элементов).
398
Далее будет рассмотрена проблема разработки подсистемы диагностики.
Построение КБО по принципу ИМА позволит реализовать диагностическую подсистему в виде программного обеспечения (для элементов КБО (далее – элементов), входные и выходные сигналы которых циркулируют в вычислительной сети КБО) и комплекта специализированных датчиков (для диагностики измерительных элементов). При этом возникает проблема унификации диагностических систем отдельных элементов в рамках концепции ИМА.
В основном, данная проблема является следствием существующих принципов построения систем диагностирования, в основе которых лежит применение строго определенных диагностических моделей для каждого объекта контроля (ОК). Их разработка и идентификация является, с одной стороны, трудоемкой интеллектуальной работой, а с другой – не позволяет строить диагностические системы инвариантные к принципиально различным ОК. Предлагается решение данной проблемы на основе применения
интеллектуальной диагностической системы (ИДС). Принцип построения такой системы реализуется в интересах решения задачи автоматического построения диагностической модели ОК за счет применения систем искусственного интеллекта. Это позволит построить унифицированную ИДС (в виде программного обеспечения) инвариантную к различным ОК. Специализировать необходимо только исполнение датчиков информации, преобразующих входные и выходные сигналы ОК (в качестве которых выступают измерительные элементы) в цифровой вид. Схема взаимодействия ОК и ИДС представлена на рисунке 1.
399
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОК |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
xn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ym |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Дx1 |
|
Дxn |
|
|
|
|
|
|
|
|
|
|
|
Дy1 |
|
Дym |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ИДС |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S0 S1 Sk
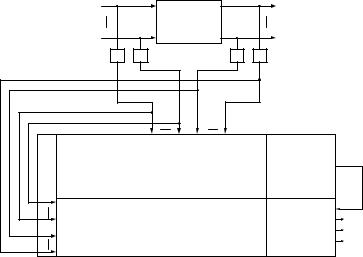
Рисунок 1 – Схема взаимодействия объекта контроля и интеллектуальной диагностической системы
На рисунке 1: ОК – объект контроля; |
Дx |
...Дx |
, Дy ...Дy |
m |
– датчики, |
|
1 |
n |
1 |
|
преобразующие входные и выходные сигналы в цифровой вид; x1...xn
– входные сигналы ОК; y1...ym – выходные сигналы ОК; ИДС –
интеллектуальная диагностическая система; S0,S1...Sk – состояния
системы.
Принцип построения ИДС должен обеспечивать:
1)обучение (формирование моделей работоспособного состояния ОК, функционирования ОК в предотказном состоянии, отказа и при необходимости других состояний);
2)запоминание (создание базы данных (знаний), включающих
сформированные модели);
3)распознавание состояний, в том числе предотказного состояния
иотказа (например, распознавание образа (состояния) как отнесение
текущей информации (точка с координатами (xi, yi)) по классам: S0 –
работоспособное состояние ОК; S1 – предотказное состояние ОК; S2
– состояние отказа ОК) и выдачу информации о ТС ОК потребителю. Задачи, решаемые ИДС:
1)построение функций yi* = f (xj ) , описывающих связь выходных
ивходных сигналов (аппроксимация функций [7]);
2)определение границ допусков для yi* = f (xj ) (допусков
функциональных зависимостей), характеризующих переход в
400
соответствующее состояние (например, предотказное состояние S1 и
состояние отказа S2 );
3) контроль нахождения текущих точек (xi, yi) в допусках функциональных зависимостей yi* = f (xj ) , определение ТС ОК и
выдача результатов потребителю.
На рисунке 2 представлены: функциональная зависимость y = 2x выходного параметра (y) от входного воздействия (x) построенная
методом |
аппроксимации функций; границы допусков |
y = 2x ±1 и |
|
y = 2x ± 2 |
для функции |
y = 2x , ограничивающих |
области |
соответствующие определенным техническим состояниям ОК.
y = 2x +1 |
|
y = 2x |
|
y = 2x + 2 |
|||
|
|||
y
ymax |
|
|
y = 2x −1 |
|
|
S2 |
y = 2x −2 |
||
|
S1 S0 S0 |
|
|
|
2 |
S1 |
|
|
|
S2 |
|
|
||
|
|
|
||
0 |
|
|
|
x |
1 xmin |
|
|||
Рисунок 2 – Результат обучения ИДС на основе метода аппроксимации функций
Вторая и третья задачи могут быть решены на основе методов
классификации образов или кластеризации. При этом основное отличие от метода аппроксимации функций заключается в том, что определение границ областей соответствующих состояний осуществляется не в форме функций, а в форме характерного распределения множества точек образующего классы или кластеры.
Метод классификации образов основан на определении принадлежности входного образа, представленного вектором признаков, к одному или нескольким предварительно определенным классам [3]. Данный метод предусматривает способ обучение ИДС с учителем (определение классов (границ областей) осуществляется разработчиком ИДС – задача минимум) и без учителя (определение
401

классов (границ областей) осуществляется автоматически самой ИДС
– задача максимум).
Метод кластеризации подразумевает, что обучающее множество не имеет меток классов. Алгоритм кластеризации основан на подобии образов и помещает похожие образы в один кластер [3]. Данный метод предусматривает способ обучение ИДС без учителя.
y |
|
|
ymax |
S2 |
S1 |
|
S0 |
|
|
|
S1 |
1 |
|
S2 |
0 1 |
xmax x |
|
Рисунок 3 – Результат обучения ИДС на основе методов классификации образов или кластеризации
Важной особенностью применения ИДС является возможность диагностики ОК, функционирующего по назначению. ИДС имеет два основных режима: обучение и диагностика. Первые две задачи относятся к обучению, а третья – к диагностике.
Обучение ИДС может реализовываться двумя основными способами:
1)обучение с учителем (например, в процессе испытаний на надежность);
2)обучение без учителя (например, в процессе испытаний или применения по назначению).
Первый способ представляет собой автоматизированное формирование моделей функционирования ОК в различных состояниях. Первый этап – автоматическое построение ИДС
функциональных зависимостей yi* = f (xj ) , i =1,m , j =1,n . Второй этап
– ввод в ИДС, определенных на основе статистических данных видов и границ допусков функциональных зависимостей. Данный способ целесообразно применять на этапе испытаний ОК на надежность, когда в результате длительных экспериментов набирается достаточно статистических данных для определения видов и границ
402

вышеуказанных допусков, которые прописываются в соответствующей нормативно-технической и эксплуатационной документации, а также вводятся в ИДС.
Второй способ является полностью автоматическим и характеризует автономность ИДС относительно процесса формирования допуска функциональных зависимостей. В зависимости от особенностей ОК могут быть выделены различные
совокупности его технических состояний {Sl },l =1,k . Если существует закономерность перехода ОК из работоспособного состояния S0 в состояние отказа S2 , то возможно установить допуск функциональной зависимости, определяющий предотказное состояние S1 . В случае, когда отказ ОК возникает внезапно, и установить
закономерность его наступления невозможно, то назначается граница допуска функциональной зависимости, отделяющая работоспособное
состояние S0 от состояния отказаS2 .
Режим диагностика обеспечивает:
1) сопоставление текущих точек (xi, yi) и допусков функциональных зависимостей yi* = f (xj ) или границ областей,
сформированных в процессе обучения и соответствующих определенным техническим состояниям ОК;
2)определение ТС ОК по результатам сопоставления;
3)выдачу информации о ТС ОК потребителю.
С целью реализации приведенных выше режимов работы ИДС предложен принцип ее построения, представленный на рисунке 4.
403
|
x1 |
|
|
|
|
|
|
|
|
y1 |
|
|
xn |
|
|
|
ОК |
|
|
|
|
ym |
|
|
|
|
|
|
|
|
|
|
|
||
|
Дx1 |
|
Дxn |
|
|
|
Дy1 |
|
Дym |
|
|
|
1. Обучение: |
|
|
Формирование моделей |
|
|
Измерение:{Х} |
Допуски дляy*i = f (xj ) |
|||
|
|
|
|
функционирования: |
|
|
|||||
|
|
1) |
построение функциональных зависимостей |
Измерение:{Y} |
(Границы областей) |
||||||
|
|
(множества точек); |
|
|
|
|
|
|
|
||
|
|
2) определение видов и границ допусков |
|
|
|||||||
|
|
функциональных |
зависимостей |
(границ |
|
|
|||||
|
|
областей). |
|
|
|
|
|
|
|
|
|
xj |
2. Диагностика: |
1) |
сопоставление |
текущих |
точек |
(xi, |
yi) |
и |
Измерение:{Х} |
|
|
допусков |
функциональных |
зависимостей |
|
||||||||
|
S0 |
||||||||||
|
|
(границ областей); |
|
|
|
|
|
Измерение:{Y} |
|||
|
|
2) определение ТС ОК; |
|
|
|
|
|
S1 |
|||
yi |
|
3) выдача информации потребителю. |
|
|
|
|
S2 |
||||
|
|
|
|
|
|
|
|
|
|
|
– |
Рисунок 4 – Принцип построения ИДС Предложенный принцип построения ИДС позволит создать
унифицированную диагностическую систему инвариантную к различным ОК, реализуемую в виде программного обеспечения (исключение –информационные элементы КБО, для диагностики которых необходимо создавать специализированные датчики). Очевидно, что данный принцип теоретически позволит создать многомерную, комплексную ИДС, для контроля ТС всего КБО. Это обеспечит решение проблемы создания диагностической подсистемы системы управления функциональной информационной избыточностью в КБО.
Литература
1.Чернодаров А.В., Контроль, диагностика и идентификация авиационных приборов и измерительно-вычислительных комплексов. М.: ООО «Научтехлитиздат», 2017. 300 с.
2.Буков В.Н., Евгенов А.В., Шурман В.А. Интегрированные комплексы бортового оборудования с управляемой функциональной
избыточностью // Сборник пленарных докладов V Международной научно-практической конференции «Академические Жуковские
404
чтения» (22–23 ноября 2017 г.). Воронеж: ВУНЦ ВВС «ВВА», 2017.
94с.
3.Интеллектуальные средства измерений: учебник для студ.
высш. учеб. заведений / Г.Г. Раннев. М.: Издательский центр
«Академия», 2011. 272 с.
Military training and research center of the air force "Air force Academy"
DIAGNOSTICS SUBSYSTEM OF CONTROL SYSTEM OF FUNCTIONAL INFORMATION REDUNDANCY IN THE
ONBOARD EQUIPMENT COMPLEX
A.Y. Savchenko, A.S. Bukirev, A.S. Vasilchenko, E.V. Ozerov
An approach to the construction of an intellectual diagnostic system that provides functional information redundancy control in the onboard equipment complex is proposed.
Key words: diagnostic system, functional information redundancy, onboard equipment complex.
УДК 681.518.5
СТРУКТУРНО-ФУНКЦИОНАЛЬНЫЙ МЕТОД РЕЗЕРВИРОВАНИЯ НА ОСНОВЕ ИНТЕЛЛЕКТУАЛЬНОЙ
ДИАГНОСТИЧЕСКОЙ СИСТЕМЫ
Савченко А.Ю., канд. техн. наук; Букирёв А.С., курсант; Васильченко А.С., адъюнкт
Военный учебно-научный центр ВВС «Военно-воздушная академия»
В работе рассмотрена классификация общепринятых методов резервирования технических систем и предложен новый метод резервирования элементов комплекса бортового оборудования на основе интеллектуальной диагностической системы.
Развитие авиационных комплексов различного назначения всегда сопровождается жесткими требованиями по снижению массогабаритных характеристик бортового оборудования (БО) с одной стороны, и не менее жесткими требованиями к повышению его надежности – с другой. Одним из способов обеспечения требуемого уровня надежности технических систем является резервирование, что однозначно ухудшает их массо-габаритные характеристики [1,2].
405
Существует много методов оптимизации резервирования систем, но все они в итоге негативно влияют на вышеуказанные диалектические характеристики БО – массо-габаритные и надежность.
Разрешение данного противоречия является актуальной научной и технической задачей. Проведем анализ основных методов резервирования, представленные на рисунке 1 [3].
Методы
резервирования
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вид |
|
|
Способ |
|
|
Способ |
|
|
|
|
Кратность |
|
|
Режим работы |
|
|
Восстанавливаемость |
|
||||||||||
|
|
|
|
|
включения |
|
|
|
|
|
|
|
|
|
|||||||||||||||
резервирования |
|
|
соединения |
|
|
|
|
|
|
резервирования |
|
|
резерва |
|
|
резерва |
|
||||||||||||
|
|
|
|
|
резерва |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Структурное |
|
Общее |
|
Постоянный |
|
|
|
Целая |
|
|
|
Нагруженный |
|
Восстанавливаемый |
||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Временное |
|
Раздельное |
|
Динамический |
|
|
Дробная |
|
|
|
Облегченный |
|
Невосстанавливаемый |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Информационное |
|
Смешанное |
|
|
Замещением |
|
|
|
|
|
|
|
Ненагруженный |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Функциональное |
|
|
|
|
|
|
Скользящее |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Мажоритарное
Рисунок 1 – Классификация методов резервирования
Структурное резервирование – метод повышения надежности объекта, предусматривающий использование избыточных элементов, входящих в физическую структуру объекта [2]. Суть структурного резервирования заключается в том, что в минимально необходимый вариант объекта вводятся дополнительные элементы. Элементы резервированной системы носят следующие названия. Основной элемент – элемент структуры объекта, необходимый для выполнения объектом требуемых функций при отсутствии отказов его элементов. Резервный элемент – элемент объекта, предназначенный для выполнения функций основного элемента, в случае отказа последнего. На рисунке 2 изображена схема структурного резервирования объекта.
1
1
Рисунок 2 – Структурное резервирование объекта
406
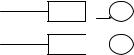
Преимущество данного метода резервирования – обеспечение бесперебойности работы системы за счет возможности выполнения резервным элементом всех функций в полном объеме при переходе основного элемента системы в неработоспособное состояние. Недостаток – данный метод резервирования ухудшает массогабаритные характеристики системы.
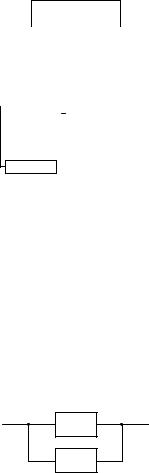
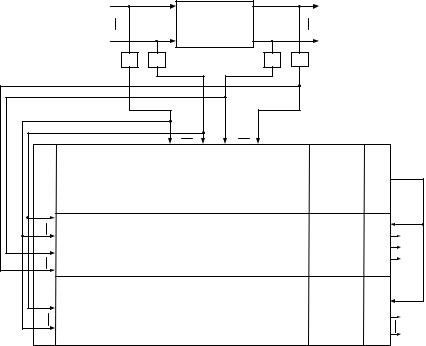
Функциональное резервирование – метод повышения надежности, предусматривающий использование способности элементов выполнять дополнительные функции вместо основных или наряду с ними (заданная функция может выполняться различными способами и техническими средствами) [2]. На рисунке 3 изображена схема функционального резервирования объекта.
1  1
1
2  2
2
Рисунок 3 – Функциональное резервирование объекта
В случае перехода первого объекта в неработоспособное состояние второй объект включается в канал первого и выполняет дополнительные функции вместо основных или наряду с ними. Данный метод резервирования не влечет за собой ухудшения массогабаритных характеристик, что является, несомненно, его положительным качеством. Недостаток функционального резервирования – элемент, функционирующий в качестве резервного, решает только часть задач основного элемента или решает их, но с худшим качеством.
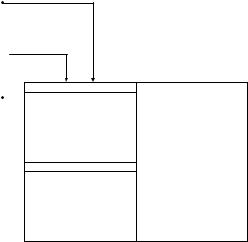
Временное резервирование – метод повышения надежности объекта, предусматривающий использование избыточного времени, выделенного для выполнения задач [2]. Резерв времени может создаваться за счет увеличения времени, выделяемого системе для выполнения задания и называемого оперативным временем. Резерв времени можно израсходовать на переключение структурного резерва, обнаружение и устранение отказов, повторение работ, обесцененных отказами, ожидание загрузки в работоспособном состоянии. При этом предполагается, что на выполнение объектом необходимой работы
407
отводится время, заведомо большее, чем минимально необходимое. Недостаток данного метода – обязательное наличие резерва времени. На рисунке 4 изображена схема временного резервирования системы.
|
1 |
|
2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
τ1 |
|
τ2 |
|
|
|
|
|
|
||
|
|
τc |
|
|
|
Рисунок 4 – Временное резервирование системы
На рисунке: 1,2 – объекты системы; τ1,τ2 – резервное (избыточное)
время первого и второго объекта соответственно; τc – резервное
(избыточное) время системы.
Информационное резервирование – метод повышения надежности, предусматривающий использование избыточной информации, сверхминимально необходимой для выполнения задач [2]. Примерами информационного резервирования являются многократная передача одного и того же сообщения по каналу связи; применение при передаче информации по каналам связи различных кодов, обнаруживающих и устраняющих ошибки, которые появляются в результате отказов аппаратуры и влияния помех; введение избыточных информационных символов при обработке, передаче и отображении информации. Избыток информации позволяет в той или иной мере компенсировать искажения передаваемой информации или устранять их. Недостаток данного метода – сложность реализации управления избытком информации.
Остальные способы и виды резервирования не являются самостоятельными, а лишь уточняют особенности рассмотренных методов, вследствие чего, проведение их анализа – нецелесообразно.
Предлагается решать задачу резервирования элементов комплекса бортового оборудования (КБО) на основе интеллектуальной диагностической системы (ИДС), имеющей возможность выполнять функции объекта контроля (ОК). С целью реализации приведенного выше режима работы ИДС предложен принцип ее построения, представленный на рисунке 5.
408
|
x1 |
|
|
|
|
|
y1 |
|
|
|
|
|
|
xn |
|
|
ОК |
|
|
ym |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Дx1 |
Дxn |
|
|
Дy1 |
Дym |
|
|
|
|
|
|
|
1. Обучение: |
|
|
Формирование моделей |
Измерение:{Х} |
; |
|
|
|
|||
|
|
|
функционирования: |
|
) |
|
|
|
|
|||
|
|
|
|
j |
|
|
|
|
||||
|
|
|
1 |
построение функциональных |
Измерение:{Y} |
= f (x |
|
|
|
y*i = f (xj ) |
||
|
|
|
|
зависимостей; |
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
Построение y* определениедопусков функциональных |
зависимостей. |
|
||||
|
|
|
2 определение видов и границ |
|
|
|||||||
|
|
|
|
допусков функциональных |
|
|
||||||
|
|
|
|
зависимостей. |
|
|
|
|||||
xj |
2. Диагностика: |
|
1) |
компарирование |
yˆi и |
|
Измерение:{Х} |
): )и |
|
|
|
|
|
|
j |
j |
|
|
|
||||||
|
|
соответствующих |
ny*i |
; |
f (x f (x |
|
|
S0 |
||||
|
|
|
2) определение ТС ОК; |
|
Измерение:{Y} |
= = |
|
|
||||
|
|
|
|
i * i |
|
|
||||||
|
|
|
|
|
y |
|
|
S1 |
||||
|
|
|
3) выдача информации |
|
|
Построение yˆ |
–применение функциональныхдопусков |
зависимостей. |
||||
yi |
|
|
|
|
S2 |
|||||||
|
|
|
потребителю. |
|
|
|
||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||
|
3. Работа в режиме ОК: |
|
Преобразование входного |
Измерение:{Х} |
Использование ИДС в |
качестве резервирования |
|
|
|
|||
|
сигнала по закону построенной |
|
|
|
||||||||
xj |
|
|
функциональной зависимости |
Измерение:{Y} |
ОК. |
|
||||||
|
|
|
|
|
|
Преобразование |
yi |
|||||
|
|
|
|
|
|
|
y*i = f (xj ) |
|||||
|
Рисунок 5 – Принцип построения ИДС |
|
|
|
|
|
||||||
На рисунке: ОК – объект контроля; |
x1...xn – входные сигналы ОК; |
y1...ym – выходные сигналы ОК; |
Дx1 ...Дxn , Дy1 ...Дym – датчики, |
преобразующие входные и выходные сигналы в цифровой формат; xj ,yi – входные и выходные сигналы, преобразованные датчиками;
{X},{Y} – множества измеряемых входных и выходных параметров; yi* = f (xj ) – функциональные зависимости, описывающие связь
выходных и входных сигналов; yˆ j = f (xj ) – текущие функциональные зависимости, описывающие связь выходных и входных сигналов; ТС ОК – техническое состояние объекта контроля; S0,S1,S2 – состояния
системы; yi – выдача параметров потребителю.
409
Работе ИДС в режиме ОК предшествует ее обучение с построением функциональных зависимостей данных выходных сигналов ОК от входных и определением границ допусков функциональных зависимостей. Это позволяет преобразовывать входные сигналы ОК по законам построенных функциональных зависимостей в выходные.
Сточки зрения принадлежности данного метода резервирования
кодному из существующих, применение ИДС в режиме ОК не
является структурным резервированием, так как ИДС – это отдельная система, решающая задачи, отличные от задач ОК. При этом применение ИДС, работающей в режиме ОК, позволяет решать задачи резервируемого элемента в полном объеме, что не соответствует функциональному методу. Временное резервирование применяется при наличии избытка времени на выполнение основных и вспомогательных операций объекта, без применения дополнительных элементов. Поэтому предлагаемый метод нельзя отнести к временному методу резервирования. Также, он не является информационным, так как объем информации в ИДС является необходимым и достаточным для выполнения функций ОК.
ИДС позволяет исключить недостаток структурного метода резервирования – ухудшение массо-габаритных характеристик, так как является самостоятельной системой, предназначенной для решения других задач. Также, предлагаемый подход не имеет недостатка функционального метода, о чем говорится выше.
Проведя анализ существующих и предлагаемого методов резервирования объектов КБО, можно сделать вывод, что ИДС, работающая в режиме ОК не относится ни к одному из вышеуказанных методов. Но так как он вбирает преимущества структурного и функционального методов с исключением их недостатков предлагается работу ИДС в режиме ОК ввести в
классификацию методов резервирования и дать наименование «структурно-функциональный» метод (рисунок 6).
410
Литература 1. Чернодаров А.В., Контроль, диагностика и идентификация
авиационных приборов и измерительно-вычислительных комплексов. М.: ООО «Научтехлитиздат», 2017. 300 с.
2.Надежность и техническая диагностика: учебник для слушателей и курсантов ВУЗов ВВС/ Л.П. Колодежный, А.В. Чернодаров. М.: Изд. ВВА им. проф. Н.Е. Жуковского и Ю.А.
Гагарина, 2010. 452 с.
3.Острейковский В.А., Теория надежности: Учеб. для вузов / В.А. Острейковский. М.: Высш. шк., 2003. 463 с.
Military training and research center of the air force "Air force Academy"
STRUCTURAL-FUNCTIONAL METHOD OF RESERVATION BASED INTELLECTUAL DIAGNOSTIC SYSTEM
A.Y. Savchenko, A.S. Bukirev, A.S. Vasilchenko
The paper considers the classification of conventional methods of reservation of technical systems and proposes a new method of reservation of elements of the onboard equipment on the basis of intellectual diagnostic system.
Key words: intellectual diagnostic system, functional information redundancy, onboard equipment complex.
УДК 533.665
К ВОПРОСУ ОБ ИНТЕЛЛЕКТУАЛЬНОЙ ПОДДЕРЖКЕ ЭКИПАЖУ ПРИ ВЕДЕНИИ ОБОРОНИТЕЛЬНОГО
БЛИЖНЕГО ВОЗДУШНОГО БОЯ
В.С. Безуглов, Е.А. Пывин, В.Г. Разбойников Военный учебно-научный центр ВВС «Военно-воздушная академия»
В статье рассмотрен подход к оценке взаимного расположения атакуемого ракетой летательного аппарата и зоны поражения ракеты.
Современные самолеты-истребители имеют достаточно высокие показатели маневренности. Однако, в различных условиях полета летчик не всегда способен осуществлять управление летательным аппаратом (ЛА) таким образом, чтобы полностью реализовать
412
возможности заложенные в его конструкции. Особенно это касается выполнения боевых задач, которые сопряжены с высокими психофизиологическими нагрузками, которые испытывает летчик. В связи с этим, свою актуальность приобретает вопрос создания различных интеллектуальных систем поддержки принятия решения летчика. Эти системы требуют алгоритмического обеспечения и разработки методик формирования рациональных законов управления летательным аппаратом.
Одной из основных форм применения самолетов-истребителей является воздушный бой. В современном воздушном бою можно выделить противоборство сторон на дальностях, превышающих дальность визуальной видимости, и противоборство при визуальной видимости. Во втором случае стороны осуществляют ближний воздушный бой (БВБ), который производится в условиях маневрирования с большими перегрузками и полным использованием маневренных возможностей ЛА и физических данных летчика. В БВБ в зависимости от взаимного расположения истребитель может оказаться атакующим или обороняющимся [1].
Относительное движение двух ЛА (атакующего и атакуемого) осуществляется для достижения одной из двух целей. С точки зрения атакующего, первая цель предполагает вывод самолета-истребителя в область пространства, связанную с атакуемым, из которой возможно эффективное применение заданного типа авиационного средства поражения (АСП). Вторая предполагает столкновение управляемой ракеты с целью для ее поражения.
С точки зрения обороняющегося ЛА, относительное движение двух динамических объектов может осуществляться в интересах достижения также двух целей. Первая предполагает срыв атаки истребителя противника, вторая - срыв наведения управляемой ракеты
[2].
Применение самонаводящихся ракет по-прежнему является основным способом поражения воздушных целей. Самонаводящиеся ракеты могут относиться к различным классам и являться средствами воздушного, наземного или корабельного базирования.
При наведении ракеты на цель, параметры ее движения определяются положением, относительно атакуемой воздушной цели. Таким образом, ракета, преследующая цель, не свободна в выборе
413
управления движением, а кинематически связана с объектом преследования.
Наличие данной кинематической связи, возможность идентификации типа атакующей ракеты, знание ее тактикотехнических характеристик и реализуемых алгоритмов управления, а так же точное определение условий пуска, позволяют оценить достаточность маневренных возможностей обороняющегося ЛА для срыва наведения ракеты и сформировать требуемы закон движения, обеспечивающий промах пущенной по ЛА ракеты.
Для исследования движения двух кинематически связанных объектов, применительно к оборонительному этапу БВБ, разработана модель, реализованная в приложении Matlab@Simulink.
Относительное положение кинематически связанных объектов характеризуется вектором дальности D= D(D,ε,ν ) со следующими
координатами: D – дальность (расстояние по линии визирования от центров масс ракеты и цели), ε – угол наклона вектора дальности к горизонтальной плоскости, ν – угол поворота проекции вектора дальности на горизонтальную плоскость.
Изменение указанных координат во времени определяется изменением векторов скорости ракеты Vp =Vp (Vp ,θp ,ϕp ) и цели
Vц =Vц(Vц ,θц ,ϕц ), где V – модуль вектора скорости, θ – угол наклона траектории, ϕ – угол поворота траектории (угол пути). Первый
вектор изменяется в соответствии с реализуемым методом наведения, второй – в соответствии с управляющими воздействиями летчика или системы автоматического управления.
Временем начала моделирования является пуск атакующим истребителем управляемой ракеты по цели. Начальному времени
соответствуют векторы начальной дальности D0=D0(D0 ,ε0 ,ν0 ),
начальной |
скорости |
ракеты |
Vp0 |
= |
|
θ |
ϕ |
p0 ) |
и |
начальной |
|||
|
|
|
|
|
Vp0 |
(Vp0 , |
p0 , |
|
|
||||
скорости |
цели |
= |
(Vц0 |
θ |
|
ϕ |
) |
. |
Начальные |
условия |
|||
|
|
Vц0 Vц0 |
, ц0 |
, ц0 |
|
|
|
|
|
||||
моделирования представлены на рисунке 1.
414
xg |
ϕц0 |
y |
g |
|
V |
|
|
|
|
ц0 |
|
|
Dcosε |
Vц0 cosθц0 |
|
|
θц0 |
|
|
|
|
||
|
|
|
Vр0 θр0 |
|
|
|
ν0 |
|
|
D |
|
|
ϕр0 |
|
|
ε0 |
|
|
|
|
|
|
|
|
Vр0 cosθр0 |
zg |
|
|
Dcosε |
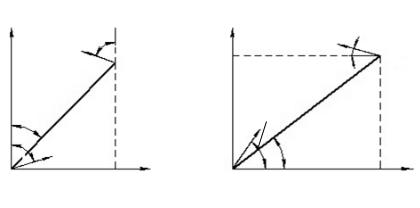
Рисунок 1 - Начальные условия моделирования
Математическая модель кинематически связанных объектов представляет собой систему дифференциальных уравнений:
|
|
=[Vt cosθt sin(ϕt −ν)−Va cosθa sin(ϕa −ν)] |
|
1 |
|
|
|
|
|
|
|
|
|
||||||||||
υ |
Dcosε |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|||
ε |
= V |
sinθ |
t |
cosε −cosθ |
t |
sinε cos(ϕ |
t |
−ν) |
] |
−V |
sinθ |
a |
cosε −cosθ |
a |
sinε cos(ϕ |
a |
−ν |
|
|||||
|
|||||||||||||||||||||||
|
|
t [ |
|
|
|
|
|
a [ |
|
|
|
|
] |
D |
|||||||||
|
|
=Vt [sinθt sinε +cosθt |
|
|
|
−ν)]−Va [sinθa sinε +cosθa cosε cos(ϕa |
−ν)] |
||||||||||||||||
D |
cosε cos(ϕt |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Уравнения движения центров масс ракеты и цели записываются с использованием коэффициента перегрузки:
|
|
|
|
|
(nx |
|
|
|
V = g |
−sinθ) |
|||||||
|
|
|
|
|
a |
|
|
|
|
|
|
g |
|
|
|
|
|
|
|
|
|
(nya |
|
cosγ −cosθ) |
||
θ |
= |
|
|
|
||||
V |
|
|||||||
|
|
|
g |
|
|
|||
|
|
= − |
|
nya sinγ |
||||
|
|
|
|
|||||
ϕ |
V cosθ |
|||||||
|
|
|
|
|
|
|||
Управляющая перегрузка и крен формируются исходя из решения поставленных задач с учетом накладываемых ограничений.
Разработанная модель включает приведенные выше системы дифференциальных уравнений, формирование управляющей
415
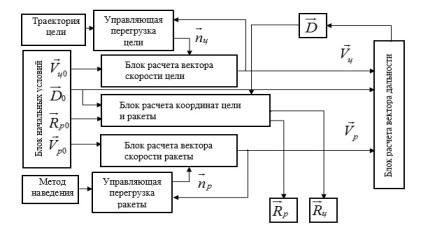
перегрузки ракеты, исходя из реализации метода пропорционального наведения, произвольно задаваемый закон движения цели. Структурная схема модели представлена на рисунке 2.
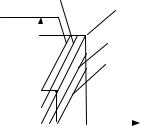
Возможности управляемой ракеты по поражению воздушной цели ограничены следующими факторами. Первый – это энергетические возможности ракеты, характеризующиеся максимальной дальностью поражения и временем полета. Второй – это угол визирования координатора цели, определяющий возможность захвата цели ракетой. Третий – это маневренные возможности ракеты, характеризующиеся располагаемой перегрузкой, которая зависит от высоты и скорости полета ракеты.
Таким образом, наличие трех ограничивающих факторов обуславливают деление пространства вокруг ракеты на две области: зону поражения ракеты и зону, в которой ракета цель не поражает.
В результате моделирования пуска ракеты по цели, при условии что движение ракеты и цели осуществляется в местной горизонтальной плоскости, получены границы зоны поражения ракеты для различных вариантов сочетаний скорости и высоты пуска.
Качественно эта граница представляет собой линию, представленную на рисунке 3. Направление xк совпадает с Vp0 .
Рисунок 2 - Структурная схема модели наведения ракеты на цель
416
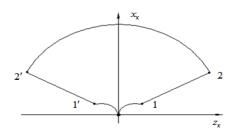
Участки 0-1, 0-1/ определяются возможностью полета ракеты с максимальной располагаемой перегрузкой, участки 1-2, 1/-2/ - возможностью захвата цели ракетой, участок 2-2/ - это дальняя граница зоны поражения, характеризующая энергетические возможности ракеты.
Рисунок 3 - Граница зоны поражения ракеты
Геометрические размеры указанной зоны зависят только от начальных условий пуска, поэтому в момент пуска можно оценить положение цели относительно зоны поражения ракеты, как в момент пуска, так и всех точек траектории движения цели. Наличие на борту цели базы данных по координатам зон поражения различных типов управляемых ракет позволит системе автоматического управления, при наличии соответствующих алгоритмов, сформировать закон движения цели, обеспечивающий выход из зоны поражения ракеты в заданное время.
Литература 1. Болховитинов О.В. Боевые авиационные комплексы и их
эффективность. – М: ВВИА имени проф. Н.Е.Жуковского, 2008. – 224с.
2. Левицкий С.В., Свиридов Н.А. Динамика полета. – М.: изд. ВВИА им. проф. Н.Е. Жуковского, 2008. – 527 с.
417
Military training and research center of the air force "Air force Academy"
TO THE ISSUE OF INTELLECTUAL SUPPORT TO THE CREW
IN DEFENSIVE AIR BATTLE
V. S. Bezuglov, E. A. Pivin, V. G. Razboynikov
The article describes an approach to assessing the relative position of the aircraft attacked by a missile and the zone of damage to the missile.
Key words: zone of damage to the missile, intellectual support to the crew.
УДК 533.6.013
К ВОПРОСУ О ПРИМЕНЕНИИ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ЛЕТЧИКА, ОСНОВАННОЙ НА НЕЧЕТКОЙ ЛОГИКЕ, ПРИ ПРОВЕДЕНИИ ИСПЫТАНИЙ С ЦЕЛЬЮ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК УСТОЙЧИВОСТИ И
УПРАВЛЯЕМОСТИ САМОЛЕТОВ
Ивашков С. С., Волошин В. А., младший научный сотрудник, Васильев Д. В., курсант
Военный учебно-научный центр ВВС «Военно-воздушная академия»
В данной статье описывается применение математической модели летчика, основанной на нечеткой логике, для научно-методического сопровождения испытаний летательных аппаратов. Представлена схема возможной модели управляющих действий летчика, основанной на использовании теории нечеткой логики.
Ключевые слова: испытания, модель управляющих действий летчика, нечеткая логика.
Определение характеристик устойчивости и управляемости (ХУУ) самолета является одной из основных целей испытаний. В процессе испытаний устанавливаются эксплуатационные ограничения, оцениваются эффективность органов управления во всех возможных условиях полета и полетных конфигурациях самолета, влияния различных условий полета на характеристики устойчивости и управляемости, защищенность от выхода за эксплуатационные ограничения, поведение и управляемость летательных аппаратов в предельной области режимов полета и за ее пределами и т.д. [1].
418

В настоящее время все чаще при научно-методическом сопровождении испытаний ЛА применяется математическое моделирование, как более экономичный, безопасный, а иногда, единственно возможный метод определения ХУУ. Основным требованием при моделировании является обеспечение адекватности полученных результатов. Адекватность результатов моделирования обеспечивается применением достоверных математических моделей летательных аппаратов и участием летчика-оператора, как необходимого звена в системе «летчик - система управления - самолет» с присущими ему особенностями поведения. Однако существуют задачи, когда необходимо провести множество реализаций целевой задачи пилотирования для получения статистически достоверных результатов, что требует наличия большого количества высококвалифицированных летчиков, а также больших временных затрат. Следовательно, возникает проблема проведения множественных реализаций целевой задачи пилотирования, при ограниченном количестве людских и временных ресурсов.
Для решения этой проблемы предлагается использование математической модели управляющих действий летчика, основанной на нечеткой логике (fuzzy-модель) [2] при научно-методическом сопровождении испытаний режимов. Математическая формализация такой модели представляется в виде:
X РУС = ∫F (∆pЛ , dpЛ |
dt)dt = ∫(dX РУС dt)dt, |
где X РУС – перемещение ручки |
управления самолетом; pЛ – |
параметр, по которому летчик осуществляет управление при решении определенной задачи пилотирования (перегрузка, угол крена,
вертикальная скорость и т.д.); F(∆pЛ , dpЛ  dt) – нечеткая функция, которая преобразует сигналы рассогласования между заданным и текущим параметром ∆pЛ и скорости изменения этого параметра
dt) – нечеткая функция, которая преобразует сигналы рассогласования между заданным и текущим параметром ∆pЛ и скорости изменения этого параметра
dpЛ  dt в скорость перемещения ручки управления самолетом
dt в скорость перемещения ручки управления самолетом
dX РУС  dt .
dt .
Нечеткая функция представляет собой определенный набор логических правил, которые связывают входные параметры с выходным. Входные и выходной параметры, в свою очередь,
419
представлены совокупностью термов, которые описываются определенными функциями принадлежности. На рисунке 1 представлен пример задания входной переменной «угол крена» в виде нечеткого множества термов («отрицательно большой», «отрицательно средний» и т.д.), которые описываются трапециевидными и треугольными функциями принадлежности.
Рисунок 1 – Нечеткое множество «угол крена»
Построение fuzzy-модели действий летчика включает в себя несколько этапов [3]:
−формирование банка данных управляющих действий летчика при выполнении задачи пилотирования и его предварительный анализ;
−формирование fuzzy-модели первого приближения по результатам анализа банка данных;
−формирование обучающей выборки из банка данных;
−Оптимизация fuzzy-модели первого приближения по обучающей выборке;
−выполнение моделью задачи пилотирования;
−сравнение и анализ результатов.
Банк данных управляющих действий летчика формируется из данных, записанных средствами объективного контроля при
420

многократном выполнении летчиком задачи пилотирования в процессе полунатурного моделирования или в реальном полете.
Fuzzy-модель первого приближения формируется методом экспертных оценок. На первом этапе формирования fuzzy-модели первого приближения для каждого канала управления (продольный, поперечный), определяются входные и выходной параметры модели для выполнения маневра вираж-спираль (задача пилотирования). Вторым этапом формирования fuzzy-модели является представление входных и выходного параметров в виде нечеткого множества. На третьем этапе формируется блок логических правил, которые связывают между собой входные и выходной параметры. Пример логического правила: если значение рассогласования по углу крена «отрицательное большое» и скорость крена «отрицательная большая», то скорость движения ручки управления самолетом в поперечном канале «отрицательная большая».
Обучающая выборка получается методом осреднения банка данных управляющих действий летчика и представляет собой нелинейную зависимость вида:
|
(X r , yr ), r =1,M , |
где |
– X r = (xr,1,xr,2,...,xr,n ) входные параметры, yr – выходные |
параметры в r – паре; M – объем выборки.
Оптимизация fuzzy-модели первого приближения проводится с целью повышения качества управления и приближения «действий» модели к действиям летчика. В качестве оптимизируемых параметров могут выбираться параметры функций принадлежности и (или) весовые коэффициенты логических правил. Целевой функцией оптимизации является минимизация значения среднеквадратической ошибки между выходными значениями обучающей выборки и полученного fuzzy-блока:
|
|
|
1 |
M |
2 |
|
|
f |
(I,O) = |
|
∑yr − F(X r ,I,O)) |
→ min, |
|||
|
|||||||
|
|
|
M j=1 |
|
|
|
|
где F(X r ,I,O) |
– значение выхода нечеткой |
модели при |
|||||
соответствующем значении входного параметра |
|
X r ; |
I – матрица |
||||
оптимизируемых параметров функций принадлежностей термов
421

входных переменных; O – матрица оптимизируемых параметров
функций принадлежностей термов выходных переменных. Полученная таким образом модель летчика включается в контур
управления самолетом для выполнения аналогичной задачи пилотирования. Полученные результаты анализируются и сравниваются с результатами, полученными с участием летчика.
В качестве примера на рисунке 2 представлена одна из возможных схем fuzzy-модели летчика, предназначенной для реализации испытательного режима «вираж-спираль». «Виражспираль» – это координированное движение самолета по спиралеобразной или круговой траектории при постоянной скорости (числе М) полета, неизменной конфигурации при заданном режиме работы двигателя, выполняемое с плавно нарастающей перегрузкой. Маневр используется для получения балансировочных зависимостей по перегрузке. Методика выполнения виража-спирали описана в [1].
Рисунок 2 – Схема возможной модели действий летчика
В блоке формирования заданной перегрузки задается характер ее изменения согласно методике выполнения контрольного маневра. Объект управления представлен математической моделью испытуемого самолета.
Модель летчика представлена тремя нечеткими регуляторами. В канале тангажа на вход нечеткого регулятора поступают сигналы
422
рассогласования между текущей ny и заданной ny задперегрузками и скорости изменения перегрузки dny  dt . На выходе эти сигналы преобразуются в скорость перемещения ручки dX B
dt . На выходе эти сигналы преобразуются в скорость перемещения ручки dX B  dt по тангажу.
dt по тангажу.
Значение перемещения ручки X B по тангажу получается путем
интегрирования сигнала скорости перемещения ручки. Аналогично строится управление в канале крена. Входными сигналами являются
сигнал рассогласования между текущим γ и заданным γзад углами крена и сигнал угловой скорости крена ωx . Выходной сигнал –
скорость перемещения ручки по кренуdX Э  dt . Заданный угол крена
dt . Заданный угол крена
формируется вспомогательным нечетким регулятором, который отвечает за поддержание заданного числа М путем изменения заданного угла крена. При уменьшении числа М заданный угол крена увеличивается и наоборот. В результате математическая модель летчика имеет вид:
|
dt)dt = ∫F[(ny − ny зад), dny dt]dt, |
X B = ∫(dX B |
|
|
dt)dt = ∫F[(γ −γ зад), ωx ]dt, |
X Э = ∫(dX Э |
|
|
− M зад), dM dt]. |
γ зад = F[(M |
|
|
|
Выполнение моделью «виража-спирали» требует очень точной настройки нечетких регуляторов, которая обеспечивается качественной «обучающей» выборкой.
Стоит отметить, что «вираж-спираль» является одним из наиболее трудновыполнимых маневров, так как имеет весьма «узкие» границы зачетности режима.
Таким образом, в статье представлен подход к процессу научнометодического сопровождения летных испытаний путем моделирования динамики полета самолетов с использованием нечеткой модели действий летчика.
Литература 1. Определение характеристик устойчивости и управляемости
самолетов в летных испытаниях [Текст] : монография / Г. А. Бизин,
В. Н. Тихонов, В. А. Торопов ; Федер. гос. бюдж. образоват.
423