

Методическое пособие 733
.pdfДля моделирования процесса управления, построенного на принципе регулирования по ошибке, необходимо переходить к другой форме граничных условий, а именно к заданию значения Нд на входе в погружной насос, то есть превышению уровня свободной поверхности воды в скважине над геодезическим уровнем установки всасывающего патрубка погружного насоса.
Скважина представляет собой ограниченную цилиндрическую емкость, с установленным в ее нижней части фильтром перед погружным насосом, рис. 5.2. Перед началом работы насоса, на входе устанавливается статическая высота подъема воды Hcm , м. После начала работы насоса уровень воды на
входе понижается (на 5 10 м), до значения динамического уровня, Нд, м. При дальнейшей эксплуатации скважины Нд меняется, реагируя на изменение режима водопотребления внешней сетью. Таким образом с началом откачки из скважины воды погружным насосом внешняя (водоносная)среда подает в скважину воду определенным расходом, не давая скважине опорожниться. Стабильность Нд определяется потенциальными возможностями водоносных пластов и режимом откачки воды из скважин.
В свою очередь режим откачки из скважины «привязан» к режиму водопотребления внешней сетью, а эта сеть функционирует в зависимости от «параметра-времени» по часам суток, недель, месяцев и т.д.
Таким образом, уровень Нд на входе в погружной насос зависит от взаимодействия двух конкурирующих процессов: процесса откачки воды погружным насосом и процесса водоподачи в скважину из пласта и является величиной переменной, зависящей от множества малоизученных факторов. Со стороны внешней сети режим водопотребления СПРВ как правило является хорошо изученной (хотя и стохастической) задачей. Со стороны водоносных пластов режим водоподачи в скважину может быть определен на основе формулы Дюпюи, с опытным установлением коэффициента фильтрации K ,
мощности водоносного пласта m, с учетом взаимного влияния нескольких скважин, методом суперпозиции фильтрационных течений [1].
Модель управления функционированием ВПС на основе принципа регулирования по ошибке предполагает исключение из состава граничных условий - условия (5.8), а вместо него включение условия Hqi Hj t , которое
является определенной формой ГУ I рода. При этом возможны рассогласования расходов воды в скважину и расходов откачки за счет отклонений режимов работы НС второго подъема, точности исполнения прогноза, погрешностей модели управления ВПС, дисперсий дроссельных характеристик УД, несоответствия прогноза водоподачи фактическому режиму и рядом других малоизученных факторов, которые при неблагоприятном сочетании могут приводить к заметным отклонениям этих параметров. Во всяком случае, это отклонение в составе рассматриваемой новой модели является «узаконенным» и в этом смысле она имеет принципиальное отличие от модели, построенной на принципе регулирования по возмущению.
211

Использование граничных условий в форме (5.8) давало возможность «связать» расходы водоподачи через погружные насосы с режимом водопотребления внешней сети (СПРВ). При переходе к новой форме ГУ, то есть определении в функции времени значений Нд на входах в погружные насосы, расходы через последние переходят в разряд неизвестных, что влечет за собой необходимость поиска новых аналитических связей, избыточных по отношению к связям, формирующим модель возмущенного состояния.
Вместе с тем значение Нд на входе должно быть величиной известной (или во всяком случае определяемой в рамках алгоритма), поскольку оно входит в состав цепных управлений при решении внутренней задачи управления функционированием ВПС. С этой целью проанализируем возможности векторно-информационного пространства в области управления
гидравлическими трубопроводными системами [55]. |
|
|
Модель потокораспределения |
U z U x, y 0 |
гидравлической |
трубопроводной системы на установившемся режиме функционирования, например [19, 46, 48, 54, 57 и др.] позволяет однозначно определять искомый вектор параметров состояния Z, включающий векторы зависимых Y и
независимых X переменных, при условии iK 0 , известном как правило Крамера (где iK элемент матрицы коэффициентов системы неоднородных
линейных уравнений [46]).
В состав вектора Y традиционно включаются векторы расходов среды Q с компонентами – множество участков системы); вектор полных
пьезометрических напоров H с компонентами H j ( j J JH , где J – полное множество узлов системы, JH – множество узлов с заданным и фиксированным потенциалом).
В состав вектора X включаются векторы SD , D, L с компонентами SDi , Di , Li , i I вектор H , с компонентами Hj j JH ; вектор узловых отборов (притоков) q , с компонентами q j ( j Jq – полное число энергоузлов с
фиксированным узловым отбором или притоком, включая и нулевой отбор. Компоненты вектора X включаются в состав условий однозначности.
Это традиционная постановка задачи моделирования потокораспределения в рамках прямого анализа.
В отличие от задачи прямого анализа в данном случае предлагается осуществить перевод определяющего вектора SD из множества независимых, в
состав зависимых переменных с сохранением за ним функций возмущающего параметра. При этом механизм взаимосвязи потокораспределения с параметрическим характером возмущения не меняется и сохраняется в рамках модели возмущенного состояния [53].
212
Структурообразующей основой векторно-информационного пространства при формализации в подобной постановке процессов управления является, как
ив прямой задаче, модель возмущенного состояния.
Взависимости от включения компонентов SDi в состав векторов X или Y,
матрица возмущенного состояния системы может быть квадратной или прямоугольной конфигурации. В первом случае SDi должны быть заданы в
задачах прямого анализа, во втором – они подлежат определению, что характерно для области обратного анализа.
Несомненный интерес представляет синтез дроссельных характеристик ВПС в области обратного анализа. Вместе с тем дроссельные характеристики являются «продуктом» модели управления функционированием ВПС и для их синтеза необходимо иметь возможность однозначного определения состояния системы в области обратного анализа. По своей сути дроссельные характеристики это «траектория» перехода системы из исходного в новое состояние, а модель управления – это «фотоснимок» конкретного состояния системы.
Однако задача обратного анализа строиться на основе прямоугольной матрицы возмущенного состояния (МВС) с неизвестными компонентами SDi , i ID и ставит своей целью определение последних. Подобная постановка
задачи вынуждает искать дополнительный линейнонезависимые связи, избыточные по отношению к связям, синтезирующим структуру МВС. Отметим, что МВС получена как результат решения вариационной задачи, отражающей принцип наименьшего действия применительно к гидравлическим трубопроводным системам, то есть связь между векторами X и Y формируется на уровне энергетического функционала и в этом смысле себя исчерпала. Дополнительные связи следует искать на основе других (не энергетических) принципов, например в недрах регрессионного анализа и такая связь устанавливается с помощью метода наименьших квадратов (МНК) [11, 21].
6.2. Формирование модели управления водоподъемной станцией с системой функциональных ограничений в форме баланса расходов водопотоков через сеть
При принятии новой формы граничных условий на границе между скважиной j и сетевой системой ВПС в виде Hqj Hj t , в разряд неизвестных
переводятся расходы на участках, инцидентных погружным насосам QNi , i JN (где JN – множество по-гружных насосов и участков, инцидентных погружным
насосам).
Для определения расходов на этих участках, в рамках модели управления функционированием ВПС на принципе регулирования по ошибке, необходимы дополнительные аналитические связи.
Поиск таких связей в недрах вариационных принципов аналитической механики [41, 73-75] малоперспективен, поскольку последние исчерпали себя при формировании структуры модели возмущенного состояния. С этой целью
213
предлагается использовать суррогатный (не основанный на физических законах) принцип Лежандра-Гаусса, получивший известность как метод наименьших квадратов (МНК).
Квадратичный функционал, составленный на основе МНК, представляет из себя некую остаточную функцию F, составленную путем сопоставления расходов воды, поступающей через погружные насосы в сеть ВПС, по версии пользователя и компьютерной версии:
F QzNi QNi |
2 |
|
QNi |
|
|
|
|
|
Q i ; |
|
|||
i JN |
|
i JN |
i JR |
|
(6.3) |
|
|
|
|
|
|
|
|
где QzNi , QNi – расчетный расход участка i, инцидентного насосу j, согласно версии пользователя и компьютерной версии соответственно; Q i – расчетный расход воды на участке i, подающем воду в РЧВ; JN – множество погружных
насосов; |
JR – множество приемных РЧВ; – неопределенный |
множитель Лагранжа.
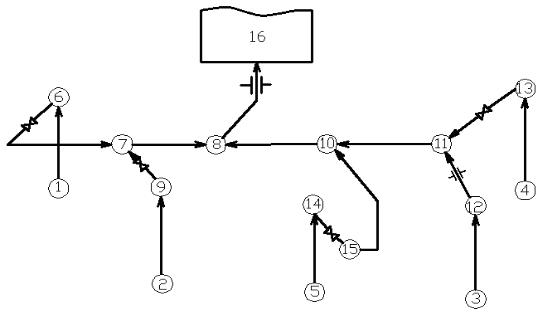
Первая группа слагаемых (6.3) – сумма квадратов ошибок между задаваемым и фактическими расходами, пропускаемыми через участки, инцидентные узлам погружных насосов (поз. 1-5, рис. 6.1).
Рис. 6.1. Расчетная схема водоподъемной станции:
(1-5) – погружные насосы центробежного типа;  - дистанционно-управляемый дроссель; 16 – резервуар чистой воды;
- дистанционно-управляемый дроссель; 16 – резервуар чистой воды;  - неуправляемые дроссели
- неуправляемые дроссели
Вторая группа отражает традиционные условия большинства гидравлических задач, состоящие в том, что любые формы возмущений в ВПС происходят при соблюдении условий сплошности воды, поступающей в
214

систему через погружные насосы и покидающей систему через РЧВ во внешнюю сеть.
В отличие от МНК, оперирующим с различными погрешностями измерений искомой величины, значения весовой функции WK в составе
целевого функционала (6.3) принимаются одинаковыми и не влияющими на положение экстремума (6.3).
Условия минимума (6.3):
F |
2 QzNi QNi 0; |
|
z |
||
Q |
Ni |
i JN |
|
||
Реализация минимума (6.3) после исключения позволяет синтезировать дополнительные независимые связи в форме системы нормальных уравнений, размерностью (N-1), где N - число энергоузлов–насосов, отождествляемое с числом скважин и числом участков, инцидентным погружным насосам.
QzN1 QN1 QzN 2 |
QN 2 |
0; |
|
|
|
|
|
|
|
QzN1 QN1 QzN3 |
QN3 |
0; |
|
|
|
|
|
|
|
.................................................. |
|
|||
QzN1 QN1 QzNN |
QNN 0; |
|
||
|
|
|
|
|
|
|
|
|
(6.4) |
|
|
|
|
|
Допускается любое другое, не повторяющееся сочетание участков из состава множества JN в (6.4).
Полная модель, с учетом (6.4), управления функционированием ВПС, построенная на принципе регулирования по ошибке, в блочно-матричном виде представлена ниже (вторая версия ЦФ):
Cn1 P
Cn1D P
Cn1N P
T |
|
hn1 1 |
|
|
|
|
|
|
|
|
|
|
M |
H |
|
||
|
hn1D 1 |
|
|
|
|
|||
|
|
|
|
|
|
|
p d |
d 1 |
|
hn1N 1 |
|
|
|||||
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
An1 |
|
T |
|
Q |
|
|
|
||
|
|
|
|
n1 1 |
|
|
||||
An1D |
|
|
|
|
|
|||||
|
Q |
0 ; |
||||||||
|
|
|
|
|
|
|
n1D 1 |
|
|
|
|
|
|
|
|
|
|||||
An1N |
Qn1N 1 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
;
(6.5)
(6.6)
215
On1 N 1 |
T |
Q |
|
|
On1 N 1 |
T |
Q |
|
|
|
|||||||||||
|
|
|
|
n1 1 |
|
|
|
|
|
n1 1 |
|
|
|||||||||
On1D N 1 |
On1D N 1 |
|
|||||||||||||||||||
Q |
Q |
|
|||||||||||||||||||
|
|
|
|
|
|
|
n1D 1 |
|
|
|
|
|
|
n1D 1 |
. |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
En1N |
|
|
|
|
|
En1N |
|
|
|
|
|
||||||||||
|
N 1 |
Qn1N 1 |
|
|
N 1 |
Qn1Nz |
1 |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(6.7) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Нормальная матрица |
E |
|
|
|
|
составлена из единичных элементов и |
|||||||||||||||
|
|
|
|
|
|
|
|
|
N 1 n1N |
|
|
|
|
|
|
|
|
|
|||
содержит в каждой строке по два единичных элемента противоположного знака. Число столбцов равно числу участков, инцидентных погружным насосам, число строк на единицу меньше. То есть по условию задачи одна линия от погружного насоса к РЧВ неконтролируема и неуправляема.
Нормальная матрица минимизирует ошибку, «притягивая» компьютерную версию потокораспределения к версии пользователя и определяя из этого условия коэффициенты S для управляемых дросселей, которых на единицу меньше, чем скважин (погружных насосов), при любых масштабах сети ВПС. При больших ВПС с большим количеством скважин влияние неуправляемости одной линии на потокораспределение существенно уменьшается.
Для схемы сети ВПС (рис. 6.1) приведем структуру подматрицы (6.7). Для этой же схемы приведем полную модель (нелинейную) управления функционированием ВПС, построенную на принципе регулирования по ошибке.
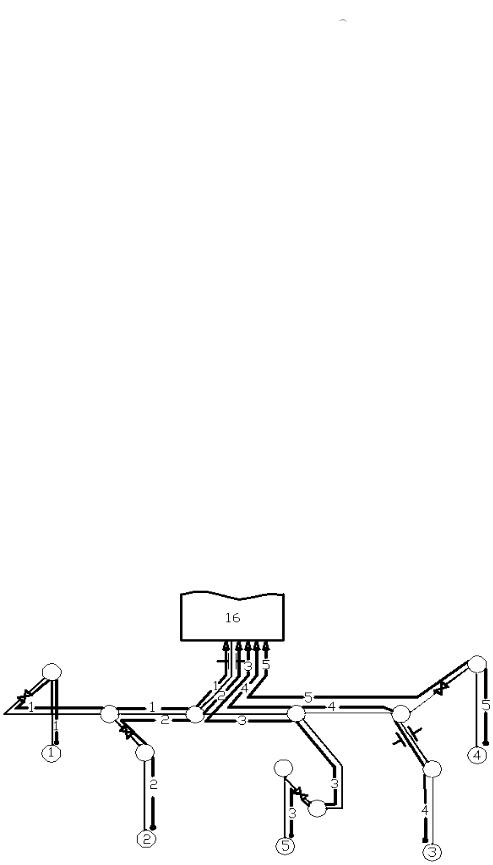
Обращаем внимание на то, что, хотя структура цепного подграфа ВПС (рис. 6.2) не претерпела изменений в сравнении с его аналогом (рис. 5.4), в составе системы цепных уравнений произошли изменения, обусловленные неконтролируемостью и неуправляемостью одной из линий (поз.3-12-11, рис. 6.1, 6.2) в соответствии с постановкой задачи.
216
Рис. 6.2. Цепной подграф ВПС:
1-5, 16 – определяемые (фиксированные) энергоузлы, ограничивающие независимые цепи
217

Структура нормальной матрицы (рис. 6.1):
I.Цепные уравнения
1)Z1 Hg1 HN1 Z16 S1 6 Q1 6 Q1 6 S6 7 Q6 7 Q6 7 S7 8 Q7 8 Q7 8
S8 16 Q8 16 Q8 16 ;
2) Z2 Hq 2 HN2 Z16 S2 9 Q2 9 Q2 9 S9 7 Q9 7 Q9 7 S7 8 Q7 8 Q7 8
S8 16 Q8 16 Q8 16 ;
3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z5 Hq5 HN5 |
Z16 S5 14 |
|
|
Q5 14 |
|
|
|
|
Q5 14 S14 15 |
|
Q14 15 |
|
|
Q14 15 |
S15 10 |
|
|
|
Q15 10 |
|
Q15 10 |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
S10 8 |
|
Q10 8 |
|
Q10 8 S8 16 |
|
Q8 16 |
|
Q8 16 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
4) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z3 Hq3 HN3 |
Z16 S3 12 |
|
|
Q3 12 |
|
|
|
Q3 12 S12 11 |
|
|
Q12 11 |
|
|
Q12 11 |
S11 10 |
|
|
Q11 10 |
|
|
|
Q11 10 |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
S10 8 |
|
Q10 8 |
|
Q10 8 S8 16 |
|
Q8 16 |
|
Q8 16 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
5) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Z4 Hq4 HN4 Z16 S4 13 |
|
Q4 13 |
|
Q4 13 S13 11 |
|
Q13 11 |
|
Q13 11 S11 10 |
|
Q11 10 |
|
Q11 10 |
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
S10 8 |
|
Q10 8 |
|
Q10 8 S8 16 |
|
Q8 16 |
|
Q8 16 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
II. Узловые балансовые уравнения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
6) Q1 6 Q6 7 0 ; 7) Q9 7 Q6 7 Q7 8 0 ; 8) Q7 8 Q10 8 Q8 16 0; |
|
|
|||||||||||||||||||||||||||||||||||||||||||||
9) Q2 9 Q9 7 0 ; 10) Q11 10 Q15 10 Q10 8 |
0 ; 11) |
Q12 11 Q13 11 |
|
Q11 10 0; |
|||||||||||||||||||||||||||||||||||||||||||
12) Q3 12 Q12 11 0 ; 13) Q14 13 |
Q13 11 0 ; |
14) Q5 14 Q14 15 0 ; |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
15) Q14 15 |
Q15 10 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
III. Нормальные уравнения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
16) |
Q1z 6 |
Q1 6 Q2z 9 |
Q2 9 |
0 |
; 17) |
|
Q1z 6 Q1 6 |
Q5z 14 Q5 14 |
0 |
; |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
18) |
Q1z 6 |
Q1 6 Q3z 12 |
Q3 12 0 |
; 19) |
|
|
|
Q1z 6 Q1 6 |
Q4z 13 Q4 13 |
0 |
|
. |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Система |
нелинейных |
алгебраических уравнений (6.5) – (6.7) |
модели |
||||||||||||||||||||||||||||||||||||||||||||
управления функционированием ВПС и ее аналог для схемы (рис. 6.1) содержат число неизвестных, равных числу участковых расходов (включая расходы участков, инцидентных узлам погружных насосов) и коэффициенты S участков с присоединенными УД, которых должно быть на единицу меньше числа
218

погружных насосов. Это соответствует числу уравнений (5 – цепных, 10 – узловых балансовых и 4 – нормальных, рис.6.1, 6.2), то есть объединенная матрица (6.5)–(6.7) имеет квадратную конфигурацию, а задача моделирования управления функционированием ВПС на принципе регулирования по ошибке является определенной.
Отметим, что значение Hqi , j JN ; HNj Hj QNj , j JN должны быть известны. Первое – из условия взаимодействия скважины и погружного насоса, второе - из напорной характеристики погружного насоса j, например (5.12).
Линейная модель управления функционированием ВПС в относительных отклонениях, полученная линеаризацией (6.5)–(6.7), при вариации Qi , Si , i ID
; фиксировании Hqi const , j JN и напорной характеристике погружного
насоса j в форме (5.12) в блочно-матричном виде представлена ниже:
Сn1 P T |
|
2h |
|
|
|
|
|
0 |
|
|||||||||
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
n1 |
|
|
2h |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
n1D P |
|
|
|
0 |
|
|
|
|
|
n1D |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
Cn1N P |
|
0 |
|
|
|
|
0 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
MP d HN |
|
N |
|
|
|
|||||||||||||
H |
; |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d 1 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
0 |
|
|
|
Q |
|
|
|
hn1 |
|
|
|
|
|
0 |
|
|
0 |
|
|
|
0 |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
n1 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
Q |
|
|
|
|
h |
|
|
|
|
|
|
|
S |
|
|
||||||||||||||||||
0 |
|
n1D 1 |
0 |
|
|
|
|
n1D |
|
|
|
0 |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n1D |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
2hn1N |
|
|
|
Q |
n1N 1 |
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
hn1N |
|
|
0 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
(6.8)
|
|
An1 |
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
Q |
|
|
|
|
|
|
0 |
|
|
0 |
|
|
|
|
|
Q |
|
|
n1 1 |
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
An1D |
|
|
|
|
|
|
n1 |
|
|
|
|
Q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
n1D |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
n1D 1 |
0 ; |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
An1N |
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
Qn1N |
|
|
|
|
|
z |
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Q |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n1N 1 |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(6.9) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
0n1 N 1 |
|
|
|
T |
Q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
n1 1 |
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
Q |
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
0n1D N 1 |
|
|
|
|
|
n1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
Q |
n1D |
|
|
|
0 |
|
|
|
Q |
n1D 1 |
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
0 |
0 |
|
|
|
Q |
|
|
|
Q |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n1N |
|
|
|
|
|
|
|
|
|
|
|
|
n1N 1 |
|
|
|
|||||||||||||||
|
|
|
|
|
n1N |
N 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0n1 N 1 |
|
|
|
T |
Q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
n1 1 |
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
Q |
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
0n1D N 1 |
|
|
|
|
|
n1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
Q |
n1D |
|
|
|
0 |
|
|
|
Q |
n1D 1 |
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|||||||||||||||||||
E |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
n1N N 1 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
Qn1N |
|
|
|
Q |
Z |
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n1N 1 |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(6.10) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где [ Q ] – матрица относительных отклонений расходов воды через соответствующие участки сети ВПС согласно компьютерной версии; [ Qz ] – то
219

же, но задаваемых согласно версии пользователя; [ SD ] – матрица
относительных отклонений коэффициентов гидравлических сопротивлений УД. Каждая из подматриц (6.8), (6.9), (6.10), как и их аналоги в предыдущей модели, разбиты на три блока: первый блок сформирован по числу столбцов n1, включающем все участки сети ВПС, кроме участков с присоединенными УД (n1D) и участков, инцидентных погружным насосам (n1N); второй блок с
числом столбцов n1D и третий блок с числом столбцов n1N.
Рассмотрим формирование линейной модели управления функционированием ВПС, построенной на принципе регулирования по ошибке, на примере сети рис. 6.1, оснащенной погружными насосами первого подъема, и результаты численного моделирования.
Исходная информация и начальное приближение по параметрам водопотоков сетевой системы ВПС, представлены в табл. 6.1-6.3.
Процедура моделирования включала итерационный поиск решения системы уравнений (6.5.) – (6.7) по программе Mathlab.
Таблица 6.1 Исходная информация и начальное приближение по узлам (рис. 6.1)
Ном |
Марка насоса |
|
|
|
Z Hq , м; |
|
0 |
|
Z Hq HN |
0 |
||||
|
|
|
0 |
|
|
|
|
|||||||
ер |
|
|
QNj , л/с |
HNj , м; |
, |
|||||||||
|
|
|
|
|
Nj |
H j0 , м |
|
|
j |
|||||
|
|
|
|
|
|
|
|
|
|
|||||
узла |
|
|
|
|
|
0 |
|
|
0 |
|
|
|||
j |
|
|
|
|
Z H j |
|
, м |
|
|
|
м; Z H j |
|
, м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
ЭЦВ10-120-60 |
|
35,56 |
79,36 |
|
|
52,91785 |
132,27785 |
|
|
|
|||
2 |
ЭЦВ10-120-60 |
|
33,466 |
60,55 |
|
|
59,301 |
119,854 |
|
|
|
|||
3 |
ЭЦВ10-65-65 |
|
14,835 |
79,066 |
|
|
76,661 |
155,727 |
|
|
|
|||
4 |
ЭЦВ10-65-65 |
|
17,22 |
85,952 |
|
|
69,775 |
155,727 |
|
|
|
|||
5 |
ЭЦВ10-120-60 |
|
32,722 |
73,019 |
|
|
61,27 |
134,289 |
|
|
|
|||
6 |
- |
|
- |
|
97,15 |
|
|
30,418 |
127,568 |
|
|
|
||
7 |
- |
|
- |
|
82,15 |
|
|
14,3405 |
96,49 |
|
|
|
||
8 |
- |
|
- |
|
80,0 |
|
|
15,0 |
95,0 |
|
|
|
||
9 |
- |
|
- |
|
97,05 |
|
|
18,344 |
115,354 |
|
|
|
||
10 |
- |
|
- |
|
75,0 |
|
|
21,306 |
96,306 |
|
|
|
||
11 |
- |
|
- |
|
70,0 |
|
|
26,821 |
96,821 |
|
|
|
||
12 |
- |
|
- |
|
93,88 |
|
|
50,861 |
151,227 |
|
|
|
||
13 |
- |
|
- |
|
99,8 |
|
|
44,8248 |
151,227 |
|
|
|
||
14 |
- |
|
- |
|
87,5 |
|
|
42,8075 |
129,789 |
|
|
|
||
15 |
- |
|
- |
|
85,0 |
|
|
11,642 |
96,642 |
|
|
|
||
16 |
- |
|
- |
|
94,0 |
|
|
0 |
|
|
94,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 6.2 |
|||
|
|
|
Напорные характеристики насосов |
|
|
|
|
|||||||
Марка насоса |
Уравнение напорной характеристики |
|
|
|
|
|||||||||
ЭЦВ10-120-60 |
|
HN 0,17 QN 2 8, 686QN 40,989 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
||||||||
ЭЦВ10-65-65 |
|
HN 0,151 QN 2 1,953QN 80,92 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
220 |
|
|
|
|
|
|
|
||