

Методическое пособие 733
.pdf1 - насосная часть; 2 – электродвигатель; 3 – клапан; 4 – пробка сливная
проводах ВПС рекомендуется описывать с помощью модели установившегося потокораспределения в приближенной квазистационарной постановке эксплуатационной задачи. Это связано с исчезающе малыми значениями производной по времени объемного расхода воды [1, 18].
Рис. 5.2, Схема ВПС с погружным насосом типа ЭЦВ:
1 – артезианский погружной насос типа ЭЦВ; 2 – фильтр; 3 – задвижка; 4 – накопительная емкость; 5 – обсадная труба артезианской скважины
напора определяется известной формулой [34], в которой фигурируют производная по времени объемного расхода воды. Гидравлические процессы в трубопроводах ВПС рекомендуется описывать с помощью модели установившегося потокораспределения в приближенной квазистационарной постановке эксплуатационной задачи. Это связано с исчезающе малыми значениями производной по времени объемного расхода воды [1, 18].
Вместе с тем режим водоподачи в скважину, будучи квазистационарным, зависит от времени функционирования СПРВ по часам суток, недель, месяцев и т.д. Время в этом случае выступает как параметр.
191
Таким образом, модель управления функционированием ВПС строится на основе модели возмущенного состояния [55] для одномерного квазистационарного течения вязкой несжимаемой жидкости в трубах.
Как уже отмечалось ранее, в теории автоматического регулирования известны два принципа регулирования: а) принцип регулирования по возмущению и б) принцип регулирования по ошибке [52]. Последний получил широкое распространение в качестве основополагающего принципа, предназначенного для автоматического поддержания необходимых значений одной или нескольких величин (расходов подаваемой из скважин воды), характеризующих нормальное протекание технологического процесса. В системах первого подъема таким технологическим процессом является процесс водоподачи от отдельных скважин в систему ВПС.
Вместе с тем, несмотря на ограниченную область реализации принципа регулирования по возмущению, для автоматического регулирования и управления большими системами, каковыми чаще всего и являются ВПС, этот принцип в ряде практически важных случаев находит применение в качестве конкурентоспособного по отношению к принципу регулирования по ошибке. Несомненным его достоинством является сравнительно невысокий порядок блочно-матричных конструкций в составе модели управления функционированием, что немаловажно для оперативного исполнения задания, генерируемого и передаваемого из компьютерного центра исполнительным устройствам как звеньям системы автоматического регулирования и управления ВПС.
Оперативности управления способствует также использование так называемых дроссельных характеристик исполнительных органов, являющихся «продуктом» модели управления и позволяющих избавиться от необходимости итерационного решения систем уравнений больших размерностей в течение короткого времени подготовки и передачи множества управляющих сигналов.
Процесс управления ВПС реализуется целенаправленным воздействием (из компьютерного центра) на гидравлическое сопротивление множества I D
дистанционно управляемых дросселей. Множеству I D должно соответствовать
идентичное множество скважин, то есть каждая скважина оснащена собственным дросселем.
Для рассматриваемого в данном разделе принципа регулирования по возмущению, означенным возмущением, переводящим систему из исходного состояния (определяемого временем t1 ) в новое (определяемое t 2 ), является
отношение дебита скважины q j за время t = t 2 – t1 |
|
||||
q |
= q |
(t 2 ) – q |
(t1 ), j J N , |
(5.1) |
|
j |
j |
|
j |
|
|
где J N – множество погружных |
насосов, идентичное |
множеству скважин, |
|||
причем ID JN согласно постановке задачи. |
|
||||
|
|
|
|
192 |
|

Возникает вопрос: как связать аналитически на времени t расход воды из скважины (дебит совершенного колодца) с заданным прогнозом режима водопотребления внешней сетью и пьезометрической высотой Hg при
работающей скважине?
Эта связь устанавливается с помощью формулы Дюпюи, приводимой ниже [1,12]:
q Nj = |
2,73 Kф m (Hcmj |
Hgj ) |
, j J , |
(5.2) |
R j |
|
|||
|
|
N |
|
|
|
|
|
|
lg roj
где q Nj – дебит скважины j (расход подачи воды из скважины погружным насосом); К ф – коэффициент фильтрации; m – мощность водоносного пласта; R j – радиус (влияния) действия скважины j; Hcmj – уровень воды в скважине j при отсутствии откачки; Hgj – уровень воды в скважине j при установившемся отборе из скважины; roj – радиус колодца скважины j.
Величины Kф , m и R определяются по результатам гидрогеологических
изысканий. Наибольшую сложность представляет определение R. Его ориентировочные значения даны в [1, табл. IV.3].
Для гидравлического расчета совершенных скважин Н.Н. Абрамов
рекомендует использовать приближенную формулу |
|
|
R 1,5 |
a t , |
(5.3) |
где t – время откачки; a – коэффициент пьезопроводности.
Коэффициент а наиболее достоверен по результатам опытных откачек
при эксплуатации скважин. Его значения могут изменяться от 10 3 до 10 6 м 2 /сут. в зависимости от степени проницаемости пород.
Формулы (5.2), (5.3) «работают» в условиях установившегося движения воды в скважине, когда количество отбираемой воды из скважины равно количеству воды, притекающей в скважину (через фильтр) из грунта.
Формула Дюпюи носит весьма приближенный характер, поскольку она является итогом решения сложной гидродинамической, трехмерной задачи фильтрации и включает достаточно большое число малоизученных факторов. Однако она дает возможность определить значения Hqi , j J N , необходимые
для решения задачи потокораспределения в сетевой системе ВПС, поскольку Hq фигурирует в составе цепных уравнений математической модели управления функционированием водоподъемной станции.
При отборе воды из водоносного пласта несколькими скважинами, их взаимодействие может снижать дебит каждой отдельной скважины. В работе [1] приведена приближенная формула учета взаимного влияния множества J N
193

произвольно расположенных скважин, позволяющая внести поправку в дебит скважины j, учитывающую их взаимное влияние.
Прогнозирование режима водопотребления внешней сетью, запитываемой от множества J NST насосных станций второго подъема, хотя и
является в большей части стохастической задачей, тем не менее хорошо изучено и позволяет составить прогноз по дебиту каждой скважины, подающей воду в РЧВ на основе условия:
qSj t Qj t ;
j JN |
j JNST |
(5.4) |
где Q j (t) – задаваемое, из состава прогноза, водопотребление от источника j внешней сети на времени t; q Sj (t) – расход, поступающий в скважину j из
водоносного пласта, за время t.
Это условие позволяет «привязать» режимы работы множества J N
скважин к заданному прогнозу режима водопотребления СПРВ внешней сети по часам суток, недель, месяцев и т.д. В задаче моделирования управления ВПС правая часть условия (5.4) полагается известной.
Соблюдение условия (5.4) гарантирует, при установившемся режиме движения воды в скважине стабилизацию уровня свободной поверхности в РЧВ, то есть исключение ее опорожнения или переполнения.
Таким образом, общая задача моделирования управления функционированием ВПС, построенная на принципе регулирования по возмущению, декомпозируется на две частных задачи:
а) моделирование потокораспределения в сетевой системе ВПС, в области управления ее функционированием (внутренняя задача);
б) моделирование взаимодействия сетевой системы ВПС с гидравлическими характеристиками внешней системы «водоносный пластскважина» (внешняя задача).
В данной монографии обстоятельно рассматривается внутренняя задача. Внешняя задача «привязывается» к внутренней в рамках алгоритма решения последней.
5.2. Формирование модели управления функционированием ВПС на основе принципа регулирования по возмущению
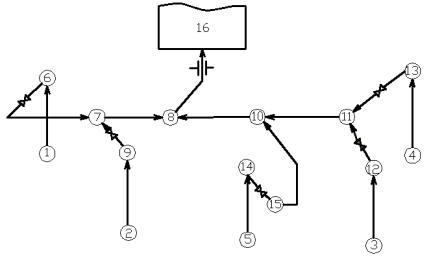
Адекватность гидравлических процессов в трубопроводах водоподъемной станции и в составе математической модели ВПС устанавливается граничными условиями в форме определяемых потенциалов в энергоузлах, ограничивающих трубопроводную систему (поз.1-5,16, рис. 5.3). Иными словами, узловые напоры в энергоузлах, ограничивающих сеть ВПС, должны быть определяемы в любой момент времени t функционирования системы, независимо от параметрических возмущений, вносимых в систему, путем перенастройки множества исполнительных органов системы управления.
194
Поскольку модель управления формируется на основе модели возмущенного состояния, она включает систему линейно независимых цепных уравнений, отображаемых в составе математической модели потокораспределения уравнениями Бернулли для несжимаемой жидкости, составленных относительно независимых цепей [4, 40, 54]:
Рис. 5.3. Расчетная схема водоподъемной станции:
(1-5) – погружные насосы центробежного типа;  – дистанционно управляемый дроссель; 16 – резервуар чистой воды;
– дистанционно управляемый дроссель; 16 – резервуар чистой воды;  – неуправляемый дроссель
– неуправляемый дроссель
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
sgn hij sgnSij |
|
Qij |
|
Qij Z Hq HN N |
Z H K j, |
|||
|
|
|||||||
j Jp i J |
j Jp i J |
j Jp |
|
(5.5) |
||||
|
|
|
|
|
|
|
|
|
где J p , J |
– множество независимых цепей, |
множество участков в составе |
||||||
независимой цепи j соответственно; |
S ij ,Q ij – |
коэффициент гидравлического |
||||||
сопротивления и расчетный расход участка i в составе независимой цепи j соответственно; Z N – геодезический уровень установки погружного насоса; HqN
– пьезометрический уровень воды в скважине в режиме откачки; H*N =Z N +HqN
– пьезометрический напор на входе в насос в режиме откачки; HNN – напор, вырабатываемый насосом в составе цепи j; (Z+H)Kj – пьезометрический напор конечного узла цепи j; hij – потери напора участка i в составе цепи j; sgn – оператор присвоения знака слагаемому.
Правило присвоения положительных знаков слагаемым (5.5): sgn hij hij в случае совпадения направления течения потока на участке i с
положительной ориентацией по цепи j. Отрицательные знаки присваиваются в противоположных случаях.
Множество независимых цепей Jp устанавливается на основании условия Эйлера для плоских (планарных) графов, а точнее, следствием из условия Л.
Эйлера [7, 8, 9, 63]:
195
p = d – 1; |
(5.6) |
где p – число независимых цепей в составе структурного графа (СТГ) ВПС; d – число энергоузлов с определенным узловым напором (поз. 1-5, 16, рис. 5.3).
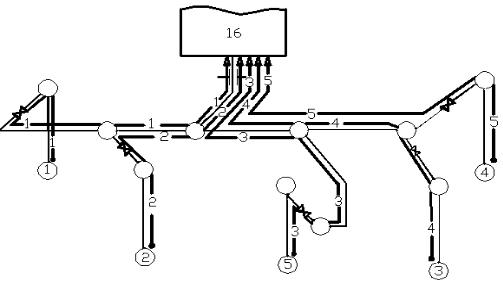
Цепной подграф в составе СТГ сетевой системы ВПС представляет собой связную разветвленную плоскую (планарную) структуру, один из вариантов которой иллюстрируется рис. 5.4, применительно к схеме сети ВПС (рис. 5.3).
Рис. 5.4. Цепной подграф ВПС:
1-5, 16 – фиксированные энергоузлы, ограничивающие независимые цепи
Фундаментальным условием линейной независимости множества J P
цепей является исключение в составе цепного подграфа любых (внутренних или внешних) контуров. Это условие является менее обременительным, чем для внешней сети, поскольку сетевая система ВПС формируется исключительно разветвленной структурой.
В соответствии с принятым вариантом цепного подграфа (рис. 5.4) начальные узлы независимых цепей отождествляются с насосными ЭУ (поз. 1- 5, рис. 5.3), конечным узлом является узел накопительной емкости (РЧВ, поз.16, рис. 5.3). Для последней пьезометрический уровень равен нулю, а H*Kj
=(Z+H)Kj =ZKj.
Напор, вырабатываемый насосом, определяется соответствующей напорной характеристикой погружного насоса и является определяемым.
Как отмечалось ранее, пьезометрический уровень H g может быть
определен либо на основе формулы Дюпюи (5.2), либо экспериментально. Последнее является более обнадеживающим.
Взадаче моделирования потокораспределения напор на входе в погружной насос полагается известным.
Всостав математической модели потокораспределения включаются, помимо цепных, узловые балансовые уравнения для узлов с незаданным (не
196

определяемым) напором, выражающие условия cплошности водопотоков в форме первого закона Кирхгофа для гидравлических сетевых систем:
sgn Qij 0,
j J i J j |
(5.7) |
где J – множество узлов системы с неизвестным напором; J j |
– множество |
участков, инцидентных узлу j; Q ij – расчетный расход участка i, инцидентного
узлу j; sgn – оператор присвоения положительного знака слагаемому с притоком к узлу j и отрицательного – с оттоком от узла.
Для схемы ВПС (рис. 5.3) число узлов с незаданным напором =10 (поз. 6-15, рисунка).
Переменными, подлежащими определению в составе математической модели потокораспределения возмущенного состояния (5.5)-(5.7), являются расходы всех участков сети ВПС и коэффициенты гидравлических сопротивлений управляемых дросселей.
Для перехода от модели возмущенного состояния к модели управления ВПС допускаем, что
QNj t qSj t , j JN |
, |
(5.8) |
|
|
где Q Nj (t) – расход, воспринимаемый погружным насосом j на времени t. Расход qSj (t) может быть получен на основе условия (5.4) в рамках
алгоритма реализации модели управления ВПС.
Условие (5.8), являясь достаточно очевидным, связывает расходы через погружные насосы с прогнозом водопотребления внешней сетью по часам суток, недель, месяцев и т.д., через уже известные расходы воды qSj (t).
Если условие (5.4) стабилизирует пьезометрический напор на входе в погружной насос Hqi, то условие (5.8) стабилизирует уровень воды в накопительной емкости РЧВ, не давая ей возможности для опорожнения или переполнения.
Для ВПС (рис. 5.3) условие (1.8) записывается так:
QN1 qS1 t ; QN2 qS2 t ; QN3 qS3 t ; QN4 qS4 t ; QN5 qS5 t .
Потенциальные возможности восстановления (в результате отбора воды погружными насосами) водоподачи скважиной определяются глубиной залегания и мощностью водоносных пластов и характеризуют, как быстро восстанавливает скважина свою работоспособность в процессе эксплуатации ВПС.
197

Режим водоподачи в скважину, то есть q Sj (t), j J N , в свою очередь
определяется и должен быть увязан с режимом водопотребления внешней сетью, объемом накопительной емкости и т.п. Если потенциал водоподачи скважин превышает водопотребление внешней сетью и скважины в составе ВПС быстро и своевременно восстанавливают водоподачу, проблем с исполнением заданного режима водоподачи и водопотребления не возникает. Система управления ВПС должна точно и своевременно исполнять режим откачки воды через погружные насосы в сеть ВПС и накопительные емкости. Однако это еще не означает, что расходы водоподачи в скважину из водоносного пласта равны расходам, потребляемым погружными насосами. Они могут отличаться в силу ряда причин: погрешностей моделирования; взаимного влияния УД, приводящего к депрессии их дроссельных характеристик; влияния инерционных слагаемых в составе уравнений гидравлики, обусловленных погрешностью допущения о квазистоционарности течения воды в трубах; погрешности исполнительных органов системы управления, измерительной аппаратуры; допущения постоянства динамического напора на входе в насосы; более глубоких причин, например трансцендентности уравнения Дарси, приближенностью уравнений Бернулли для потоков воды в трубах, погрешностями аппроксимации напорных характеристик насосов и т.д. В силу изложенного условие (5.8) является допущением, принимаемым для возможности формализации модели управления ВПС на основе модели возмущенного состояния. Поэтому в общем случае расходы воды Q Nj являются величинами неизвестными, подлежащими
определению в процессе моделирования, но в силу условий (5.4), (5.8) мы допускаем, что они нам известны и соответствуют одноименным расходам из состава прогноза водоподачи в скважину из водоносного пласта.
Обращаем внимание на то, что условие (5.8) полностью согласуется с условием (5.4) и условием установившегося движения воды в скважине, лежащего в основе формулы Дюпюи (5.2).
Представим модель управления функционированием ВПС, с учетом условия (5.8), в блочно-матричной форме:
|
Сn1 p |
|
T |
|
h |
n1 1 |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Cn1D p |
|
|
|
|
hn1D 1 |
|
|
M |
|
H* |
|
; |
||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||
Cn1N p |
|
|
|
hn1N 1 |
|
|
|
|
|
pxd |
|
d 1 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.9) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
An1 |
|
|
T |
|
|
Q |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
n1 1 |
|
|
|
|
|
|
|
|||||||||||
|
|
An1D |
|
|
|
|
|
||||||||||||||||||
|
|
|
Q |
0 , |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n1D 1 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
An1N |
Qn1N 1 |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(5.10) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
198 |
|
|
|
|
|
|
|
|
||||
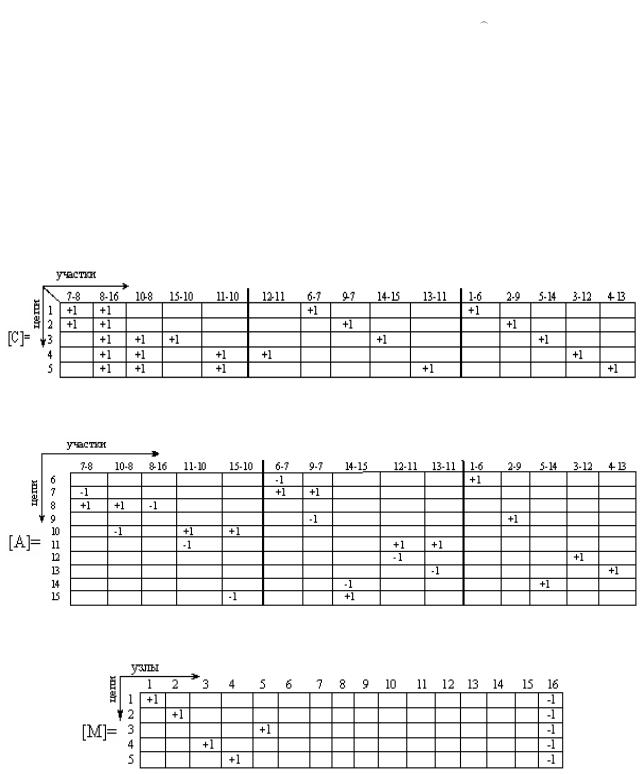
где С, А, М – матрицы системы независимых цепей, узлов с незаданным потенциалом и матрица смежности ВПС соответственно; n1 – число реальных участков трубопроводной сети ВПС, исключая участки с присоединенными УД и участки, инцидентные энергоузлам погружных насосов; n1D – то же для участков с присоединенными УД; n1N – то же для участков, инцидентных энергоузлам погружных насосов; p = (d–1) – число независимых цепей в
составе ВПС (d=( +1) |
– число узлов с заданным потенциалом, – число |
энергоузлов–насосов); |
hi – потери напора участка i; H*j Zj Hgj HNj – |
фиксированный (заданный) потенциал узла j (где H Nj – напор, вырабатываемый погружным насосом); – число узлов ВПС с незаданным потенциалом; Т – признак транспонирования; Q Ni (t) , i J N – расход воды из состава заданного прогноза режима водоподачи, воспринимаемый погружным насосом, согласно (5.8); Qi , i J D – расчетный расход участка i с присоединенным дросселем.
Рассмотрим структуру топологических матриц, составленных из единичных элементов, применительно к схеме сети ВПС (рис. 5.3).
Топологическая матрица независимых цепей (рис. 5.4):
Топологическая матрица инциденций (рис. 5.3):
Топологическая матрица смежности (рис. 5.4):
199
Нелинейная математическая модель управления функционированием ВПС применительно к схеме (рис. 5.3) приведена ниже.
I.Цепные уравнения:
1)Z1 Hg1 HN1 Z16 S1 6 Q1 6 Q1 6 S6 7 Q6 7 Q6 7 S7 8 Q7 8 Q7 8
S8 16 |
|
Q8 16 |
|
Q8 16 ; |
||||||||||||
2) Z2 |
|
Hg2 HN2 Z16 S2 9 |
|
Q2 9 |
|
Q2 9 S9 7 |
|
Q9 7 |
|
Q9 7 S7 8 |
|
Q7 8 |
|
Q7 8 |
||
|
|
|
|
|
|
|||||||||||
S8 16 |
|
Q8 16 |
|
Q8 16 ; |
||||||||||||
|
|
|||||||||||||||
Z5 |
3) |
HN5 Z16 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Hg5 |
S5 14 |
|
Q5 14 |
|
Q5 14 |
S14 15 |
|
Q14 15 |
|
Q14 15 |
S15 10 |
|
Q15 10 |
|
Q15 10 |
|||||||||||
|
|
|
|
|
|
|||||||||||||||||||||
|
S10 8 |
|
Q10 8 |
|
Q10 8 S8 16 |
|
Q8 16 |
|
Q8 16 ; |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Z3 |
4) |
HN3 Z16 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Hg3 |
S3 12 |
|
Q3 12 |
|
Q3 12 |
S12 11 |
|
Q12 11 |
|
Q12 11 |
S11 10 |
Q11 10 |
|
Q11 10 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S10 8 Q10 8 Q10 8 S8 16 Q8 16 Q8 16 ;
5)
Z4 Hg4 HN4 Z16 S4 13 Q4 13 Q4 13 S13 11 Q13 11 Q13 11 S11 10 Q11 10 Q11 10
S10 8 Q10 8 Q10 8 S8 16 Q8 16 Q8 16 .
II. Узловые балансовые уравнения:
6) Q1 6 Q6 7 0 ; 7) Q9 7 Q6 7 Q7 8 0 ; 8) Q7 8 Q10 8 Q8 16 0;
9) Q2 9 Q9 7 0 ; 10) Q11 10 Q15 10 Q10 8 0 ; 11) Q12 11 Q13 11 Q11 10 0; 12) Q3 12 Q12 11 0 ; 13) Q4 13 Q13 11 0 ; 14) Q5 14 Q14 15 0 ;
15) Q14 15 Q15 10 0 .
Прокомментируем, сохраняет ли объединенная матрица (5.9), (5.10) квадратную конфигурацию при переходе от модели возмущенного состояния к модели управления функционированием ВПС. С этой целью проведем анализ сравнения её числа столбцов и строк:
а) число столбцов, определяющее число неизвестных участковых расходов и переменных коэффициентов S участков с присоединенными УД, с учетом условия (5.8):
n n1N Q n1D S ;
б) число строк, определяющее число уравнений в составе модели управления ВПС:
200