


8. ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
8.1. Рекомендации для проведения практического занятия
Цель практического занятия: отработка навыков решения задач на вращен е твердых тел вокруг неподвижной оси и преобразование
простейш х дв жен й твердых тел. |
|
|
Перед зучен ем данной темы |
рекомендуется |
повторить со |
интегр |
|
|
студентами следующ е вопросы из курса математики: дифференцирование |
||
Си рован е функц й. Необходимо также повторить перед изучением |
||
данной темы следующие вопросы |
из раздела |
«Кинематика»: |
кинемат ческ е характеристики движения точки, понятие кривизны и радиуса кр в зны кр вой, нахождение скорости и ускорения при вращательном дв жени .
Требован я к знан ям студента:
1.Уметь прав льно формулировать теоремы кинематики для тел, совершающ х простейш е движения.
2.Знать методы определения величины и направления скоростей и ускорений точек твердого тела, находящихся на некотором расстоянии от оси вращения.
3.Уметь производить кинематический расчет передаточных механизмов.бА
8.2. Методические рекомендацииДк решению задач
При решении задач на вращательное движение твердого тела вокруг неподвижной оси встречаются задачи двух основных типов.
Первый тип задач – дано уравнение Ивращательного движения твердого тела, требуется определить угловую скорость, угловое ускорение, скорость и ускорение точки твердого тела.
Алгоритм решения такого рода задач следующий:
1.Выбираем систему координат так, чтобы одна из осей совпадала с осью вращения.
2.Составляем уравнение вращения твердого тела (зависимость угла поворота от времени).
3.Дифференцируя по времени угол поворота, определяем проекцию угловой скорости на ось вращения.
4.Вычисляя вторую производную от угла поворота по времени, определяем проекцию углового ускорения на ось вращения.
58
5. |
Пользуясь выражением проекции угловой скорости на ось |
||||||
вращения, вычисляем скорость точки и ее нормальное ускорение. |
|||||||
6. |
Пользуясь выражением проекции углового ускорения на ось |
||||||
вращения, определяем касательное ускорение точки. |
|
|
|||||
7. |
Используя найденные нормальное и касательное ускорения, |
||||||
находим полное ускорение точки по величине и направлению. |
|
||||||
С |
|
|
|
|
|
||
Второй тип задач – задано угловое ускорение или угловая скорость |
|||||||
твердого тела; требуется найти уравнение вращательного движения, |
|||||||
скорость |
ускорен е точки твердого тела. |
|
|
|
|||
В этом случае алгор тм решения задач следующий: |
|
|
|||||
скорости |
|
уравнение, |
определяющее |
||||
1. |
Интегр руя |
дифференциальное |
|||||
проекц ю углового ускорения на ось вращения, находим проекцию |
|||||||
угловой |
|
, про звольную постоянную интегрирования определяем |
|||||
по начальным данным. |
|
|
|
|
|
||
2. |
Интегр руя |
дифференциальное |
уравнение, |
определяющее |
|||
проекц ю |
угловой |
|
на ось вращения, находим |
уравнение |
|||
вращательного дв жен я твердого тела, |
произвольную |
постоянную |
|||||
интегр рованбя определяем по начальным данным. |
|
|
|||||
3.Пользуясь выражением проекции угловой скорости на ось вращения, вычисляем величину скорости и нормального ускорения точки.
4.Определяем величину касательного ускорения точки, зная проекцию углового ускорения на ось вращения, и далее находим полное ускорение точки.
Задачи на преобразование простейших движений предполагают следующую последовательность действий:
1.Исходя из условия задачи надо выписать уравнение движения или другие кинематические соотношения для того твердого тела, движение
твердого тела вокруг неподвижной Доси, найти уравнение движения другого твердого тела, которому передается движение, а также скорости и ускорения различных точек этого тела.
которого известно.
2. Пользуясь формулами кинематики точки и кинематики вращения И
8.3. Контрольные вопросы для тестирования студентов
1. Какое движение твёрдого тела называется вращательным?
Вращательным называется такое движение твёрдого тела, при котором остаются неподвижными все его точки, лежащие на прямой, называемой осью вращения. При этом все остальные точки движутся в плоскостях, перпендикулярных оси вращения, и описывают окружности, центры которых лежат на этой оси.
59

2. Показать связь частоты вращения тела с угловой скоростью.
В технике частоту вращения n тела выражают в оборотах в минуту. Связь частоты вращения n с угловой скоростью имеет вид
|
|
|
ω = |
2πn |
= πn . |
|
|
|
|
||
|
|
|
60 |
30 |
|
3. Записать уравнение вращения тела вокруг неподвижной оси. |
|||||
С |
|
|
|
||
Угол φ называют углом поворота тела (угловой координатой). |
|||||
Положение вращающегося тела в момент времени t задают |
|||||
уравнен ем |
|
|
φ = f |
(t), |
|
где f (t) – любая дважды дифференцируемая функция времени. |
|||||
Это уравнен |
е называют уравнением вращения твёрдого тела вокруг |
||||
неподв жной |
. |
|
|
|
|
4. Назов те главные кинематические характеристики вращательного |
|||||
движен я. |
б |
||||
Для характер ст ки вращательного движения твёрдого тела вокруг |
|||||
неподвосижной спользуют понятия: угловая скорость и угловое |
|||||
ускорение. |
|
|
|
|
|
Это уравнение представляетАсобой уравнение вращательного движения тела.
5. Как определяется положение вращающегося тела?
Положение вращающегося тела в любой момент
времени определяется углом поворота ϕ, являющегося функцией времени t, т.е.
ϕ=f(t).
течением времени, называется угловойДскоростью тела. Размерность угловой скорости ω выражается в [рад/c].
6. Какая величина называется угловой скоростью?
Величина, характеризующая быстроту изменения угла поворота ϕ с
ω= ddtϕ = ϕ.
7. Как определяется скорость точки вращающегося тела? |
|
Вектор вращательной скорости V направлен |
|
перпендикулярно радиусу в сторону вращения. |
И |
|
|
Модуль вращательной скорости точки твёрдого тела равен произведению кратчайшего расстояния от точки до оси вращения на угловую скорость тела:
VМ = ωR ; VD = ωr .
60
8. Какая величина называется угловым ускорением?
Алгебраическая величина, характеризующая быстроту изменения угловой скорости с течением времени, называется угловым ускорением
тела. Размерность углового ускорения ε выражается в [ рад/с2 ].
С |
|
ε = |
|
dt |
= ω= ϕ. |
|
|
|
|
|
||
|
|
dω |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||
9. Какое вращение называется равномерным? |
|
|
|
|
|
|||||||
Если во всё время движения ω |
= const ( ε = |
0), то |
вращение |
|||||||||
называется равномерным. |
|
|
|
|
|
|
|
|
|
|
||
сли |
|
|
|
|
|
|
|
|
|
|||
10. Какое вращен е называется равнопеременным? |
|
ε=const, |
||||||||||
Вращен е тела, при котором угловое ускорение постоянно |
||||||||||||
называют равнопеременным вращением. |
|
|
|
|
|
|
||||||
11. Какое вращен е называется равноускоренным и равнозамедленным? |
||||||||||||
Е |
абсолютная |
скорости |
увеличивается, |
|||||||||
|
величина |
угловой |
||||||||||
вращен е называют равноускоренным, а если уменьшается − |
||||||||||||
равнозамедленным: |
|
|
|
|
|
|
|
εt2 |
|
|
|
|
|
ω= ω0 ± εt ; |
|
ϕ = ϕ0 |
+ ω0t ± |
. |
|
|
|||||
|
|
|
|
|
||||||||
|
|
|
|
|
скорости V |
2 |
|
|
|
|||
12. Как определяется вектор |
|
при |
|
|
||||||||
помощи формулы Эйлера? |
|
|
|
|
|
|
|
|
|
|
||
Вращательная |
скорость |
|
точки |
равна |
|
|
||||||
векторному произведению вектора |
угловой |
|
|
|||||||||
скорости тела на радиус-вектор этой точки |
|
|
||||||||||
относительно оси вращенияА: |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
= ω×r , |
|
|
|
|
|
|
|
|
|
|
где r – радиус-вектор точки М, |
проведённый из |
|
|
|||||||||
|
|
|
|
|
|
|
|
И |
||||
произвольной точки оси вращения Oz, например |
|
|
||||||||||
точки О. |
|
|
|
|
Д |
|||||||
13. Как определяется ускорение точки вращающегося твёрдого тела?
Ускорение точки вращающегося твёрдого тела равно геометрической сумме нормального и касательного ускорений:
a = an + aτ .
14. Как определяются величины нормального ускорения точки
вращающегося тела?
Модуль нормального ускорения равен произведению кратчайшего расстояния (радиуса) от точки до оси вращения на квадрат полной угловой скорости тела:
an = ω2h.
61

15. Как определяются величины касательного ускорения точки
вращающегося тела?
Модуль касательного ускорения равен произведению кратчайшего расстояния (радиуса) от точки до оси вращения на абсолютное значение углового ускорения тела: aτ = εh.
16. Каким образом характеризуется вращение тела векторами ω и ε?
остояние |
|
движения |
вращающегося |
|
|
|||||||||||
твёрдого тела в данный момент характеризуется |
|
|
||||||||||||||
вектором ω, |
направленным по оси вращения в ту |
|
|
|||||||||||||
сторону, откуда вращение представляется |
|
|
||||||||||||||
происходящ м прот в часовой стрелки. |
|
|
|
|
||||||||||||
Угловое ускорен е вращающегося твёрдого |
|
|
||||||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
тела можно |
зобраз ть в виде вектора ε = |
|
|
|
|
|||||||||||
|
ω, |
|
|
|||||||||||||
направленного вдоль оси вращения. При этом |
|
|
||||||||||||||
направлен е |
ε |
совпадает с направлением |
ω, |
|
|
|||||||||||
когда тело вращается ускоренно (рис. а), и |
|
|
||||||||||||||
противоположно ω, когда вращение является |
а |
б |
||||||||||||||
замедленным (р с. ). |
|
|
|
|
|
|
|
|
|
|
||||||
17. Как определяются |
проекции скорости точки на оси координат по |
|||||||||||||||
|
|
|
|
А |
|
|
||||||||||
формулам Эйлера, если осью вращения является ось z ? |
|
|
||||||||||||||
|
|
|
|
V = −ωy ; |
V = ωx ; V |
z |
= 0, |
|
|
|||||||
бx y |
|
|
|
|||||||||||||
где x, y – координаты точки. |
|
|
|
|
|
|
|
|||||||||
18. Как определяется величина полного ускорения точки вращающегося |
||||||||||||||||
твёрдого тела? |
|
|
|
|
|
|
|
|
Д |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Модуль |
|
полного |
ускорения |
точки |
|
|
|
|||||||||
определяется по формуле |
|
|
|
|
|
|
|
|
|
|
||||||
a = |
aτ2 + an2 |
= r |
ε2 + ω4 |
. |
|
|
|
|
|
|||||||
Направление определяется углом α, |
|
|
|
|||||||||||||
составленным полным ускорением a с |
|
|
|
|||||||||||||
радиусом окружности, тангенс которого |
|
|
|
|
||||||||||||
|
|
tgα = |
aτ |
= |
ε |
. |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
an |
ω2 |
|
|
|
|
|
|
|
||||
Угол α для всех точек тела является постоянным, т. к. не зависит от |
||||||||||||||||
радиуса вращения. |
|
|
|
|
|
|
|
|
|
|
|
И |
||||
19. Как определяется величина полного ускорения точки вращающегося |
||||||||||||||||
твёрдого тела при равномерном вращении? |
|
|
|
|
||||||||||||
При равномерном вращении ω = const ( ε = 0): a = an и a = ω2h . |
||||||||||||||||
В этом |
случае ускорение |
an |
направлено по |
радиусу к |
центру |
|||||||||||
окружности, описываемой точкой.
62
20. Как определяются вектор касательного ускорения aτ ?
Касательное ускорение точки вращающегося твёрдого тела равно векторному произведению вектора углового ускорения тела на радиусвектор этой точки относительно оси вращения: aτ = ε×r .
21. Как определяются вектор нормального ускорения an ? |
|||||||
С |
|
|
|
|
|
|
|
Нормальное ускорение точки вращающегося твёрдого тела равно |
|||||||
векторному произведению вектора угловой скорости тела на |
|||||||
вращательную скорость этой точки: |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
an |
= ω×V |
= ω×(ω×r ) . |
|||
оси |
|
|
|
|
|||
22. Как выч сляются проекции ускорения точки тела, вращающегося |
|||||||
вокруг |
z? |
|
|
|
|
|
|
Проекц ускорен я точки тела |
|
|
|
||||
|
б |
|
|||||
|
ax = −εy |
−ω2 x ; |
ay = εx −ω2 y ; az = 0. |
||||
23. Что называют парой вращений и чему равна скорость этого результ рующего дв жен я?
Совокупность двух вращений тела, направленных в противоположные |
|
стороны |
А |
меющ х равные модули угловых скоростей, называют парой |
|
вращений. Результирующим движением является поступательное движение со скоростью, равной произведению модуля угловой скорости ω на расстояние d между осями вращения: V = ωd .
Вектор |
V |
направлен перпендикулярно плоскости пары угловых |
|
скоростей ω1 |
и ω2 . |
Д |
|
|
|||
24. Какими параметрами определяется положение твёрдого тела с одной неподвижной точкой?
Движение твёрдого тела, одна из точек которого во всё время движения остаётся неподвижной, называют сферическим движением твёрдого тела. При таком движении все остальные точки тела движутся по сферическим поверхностям. Положения тела в этом случае определяются
тремя углами Эйлера: ψ = f1(t); |
θ = f2 (t); ϕ = f3(t), |
где ψ − угол прецессии, θ |
− угол нутации, ϕ − угол собственного |
вращения. И
25. Как формулируется теорема Эйлера-Даламбера о перемещении
твёрдого тела с одной неподвижной точкой?
Твёрдое тело, имеющее одну неподвижную точку, можно переместить из одного положения в любое другое поворотом вокруг некоторой оси, проходящей через неподвижную точку.
63
26. Как определяются модуль и направление углового ускорения тела при
сферическом движении?
Вектор углового ускорения равен производной от вектора угловой скорости:
ε = ω,
т. е. угловое ускорение тела геометрически равно линейной скорости конца вектора угловой скорости. Прямая, по которой направлен вектор
углового ускорен |
я ε, называется осью углового ускорения. |
||||||||||||||||||||
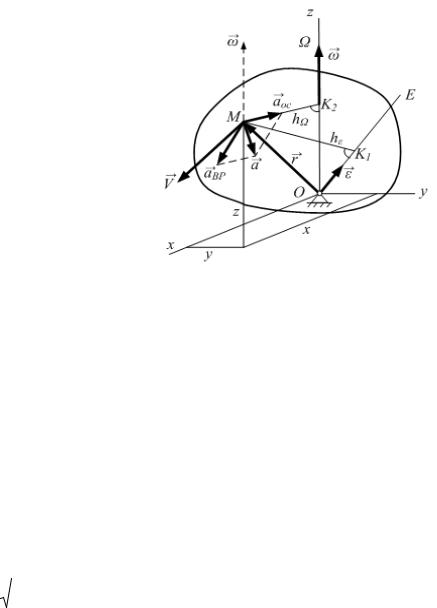
27. Как е модули |
|
направления имеют составляющие ускорения точки |
|||||||||||||||||||
тела при |
|
|
|
|
|
дв жении? |
|
|
|
|
|
|
|||||||||
Ускорен |
любой |
|
|
точки |
тела |
при |
|||||||||||||||
С |
|
|
|
определяется как |
|||||||||||||||||
|
|
|
дв жен |
|
|||||||||||||||||
геометр ческая сумма её вращательного и |
|||||||||||||||||||||
осестрем |
тельного ускорений: |
|
|
|
|
|
|
||||||||||||||
|
|
|
a = aвр + aoc . |
|
|
|
|
|
|
|
|
|
|
||||||||
сферическом |
|
|
|
|
|
|
|||||||||||||||
Вектор |
|
вращательного ускорения |
|||||||||||||||||||
aвр = ε×r |
|
направлен |
|
перпендикулярно |
|||||||||||||||||
плоскости, проходящей через ε |
|
|
и r в ту |
||||||||||||||||||
сторону, |
откуда |
|
поворот |
|
|
|
ε |
к |
r |
на |
|||||||||||
|
|
б |
|||||||||||||||||||
наименьший |
угол |
виден |
|
|
|
проходящим |
|||||||||||||||
против часовой стрелки. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Модуль вращательного ускорения |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
a |
вр |
= |
|
|
|
ε×r |
|
= εr sin(ε;r ) = h ε, |
|||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ε |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
А |
|||||||||||||||
где hε – кратчайшее расстояние от точки тела до линии, по которой |
|||||||||||||||||||||
направлено угловое ускорение ε, |
вектор углового ускорения ε |
||||||||||||||||||||
расположен в неподвижной точке. Вектор осестремительного ускорения |
|||||||||||||||||||||
a направлен |
перпендикулярно |
|
|
к |
мгновенной оси вращения. Модуль |
||||||||||||||||
oc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
||
осестремительного ускорения |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
а |
ос |
ω×V |
|
|
|
= ωV sin(ω,V )= ωV = h ω2 . |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ω |
||
В общем |
случае |
вращательное |
и осестремительное ускорения не |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
перпендикулярны; следовательно, модуль ускоренияИa вычисляют как |
|||||||||||||||||||||
диагональ параллелограмма по формуле |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
. |
||||||||||
|
|
|
|
|
|
a = |
|
|
aвр2 |
+aос2 +2aврaос cos(aвр, аос) |
|||||||||||
28. На какие составляющие движения можно разложить движение свободного твёрдого тела и как они зависят от выбора полюса?
64

Движение свободного твёрдого тела можно рассматривать как сложное, состоящее из поступательного вместе с полюсом, и сферическое движение вокруг этого полюса. Таким образом, движение свободного
твёрдого тела определяется шестью уравнениями: |
x0 = f1(t); y0 = f2 (t); |
||||||||||||||
z0 = f3 (t); ψ = f4 (t); |
|
θ = f5 (t); ϕ = f6 (t). |
|
|
|
||||||||||
Поступательная часть движения зависит от выбора полюса, |
|||||||||||||||
сферическая часть от выбора полюса не зависит. |
|
|
|||||||||||||
29. Что называют мгновенной осью вращения твёрдого тела с одной |
|||||||||||||||
неподв жной |
точкой |
|
|
|
каковы уравнения мгновенной оси вращения в |
||||||||||
неподв жной |
подв жной системах осей декартовых координат? |
||||||||||||||
и |
|
|
|
|
|||||||||||
Мгновенная |
|
ось |
|
представляет собой |
|
|
|||||||||
Сгеометр ческое место точек тела, скорости |
|
|
|||||||||||||
которых в данный момент равны нулю. |
|
|
|
||||||||||||
Уравнен я |
|
мгновенной |
оси |
в |
|
|
|||||||||
б |
|
|
|
||||||||||||
неподв жной с стеме осей |
|
|
|
|
|
|
|||||||||
ωy z −ωz y = 0 ; ωz x −ωx z = 0 ; ωx y −ωy x = 0 . |
|
|
|||||||||||||
Или эти уравнен я можно представить в виде |
|
|
|||||||||||||
|
|
x |
= |
|
y |
= |
z |
, |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
ω |
|
|
|
А |
|
||||||||
|
|
|
x |
|
|
|
y |
|
|
z |
|
|
|
|
|
где x , y , z – координаты точек мгновенной оси. |
|
|
|||||||||||||
30. Как определяются скорости точек тела при сферическом движении? |
|||||||||||||||
Скорость |
любой |
|
точки тела |
можно |
определить |
как скорость во |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вращательном движении вокруг мгновенной оси: V = ω×r , |
|||||||||||||||
где r – радиус-вектор точки, проведённый из неподвижной точки. |
|||||||||||||||
Модуль скорости |
|
|
|
|
|
|
|
И |
|||||||
V = ωr sin(ω,r )= ωh , |
|
||||||||||||||
где h – кратчайшее расстояние от |
|
|
|||||||||||||
рассматриваемой точки до мгновеннойДоси. |
|||||||||||||||
Проекции скорости точки на неподвижные |
|
|
|||||||||||||
оси декартовых координат определяются по |
|
|
|||||||||||||
формулам Эйлера: |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Vx = ωy z −ωz y ; Vy = ωz x −ωx z ; Vz = ωx y −ωy x ,
где x , y , z – координаты точек тела в неподвижной системе.
31. Как определяются скорости точек свободного твёрдого тела?
Скорость любой точки свободного твёрдого тела равна геометрической сумме скорости полюса и скорости точки в её
сферическом движении вокруг полюса: V =V 0+ω×r .
65