


16. ПРИНЦИП ДАЛАМБЕРА
16.1. Рекомендации для проведения практического занятия
Цели занятия: выяснить сущность и область применения метода кинетостатики при исследовании движения механических систем научиться выч слять даламберовы силы инерции твёрдого тела при поступательном, вращательном и плоскопараллельном его движениях,
приобрести навыки составления дифференциальных уравнений движения |
||
механическ х с стем с помощью метода кинетостатики, научиться |
||
Сопределять реакц |
опор вращающегося твёрдого |
тела методом |
ки. |
|
|
Перед зучен ем данной темы рекомендуется |
повторить со |
|
студентами следующ е вопросы из курса «Теоретическая механика»:
1. Раздел «Стат ка»: главный вектор и главный момент системы сил, |
|
кинетостат |
|
теорема о пр веден |
произвольной системы сил к центру, случаи |
приведен я с стемы с л к равнодействующей и паре сил, условия равновес я про звольной пространственной, плоской и сходящейся систем
сил. |
б |
|
|||
2. |
вращательное, |
||||
Раздел |
«Кинематика»: |
поступательное, |
|||
плоскопараллельное движение твёрдого тела. |
|
||||
3. |
Раздел «Динамика»: осевые и центробежные моменты инерции |
||||
твёрдого тела, главные и центральные оси инерции. |
|
||||
Требования к знаниямАстудента: |
|
||||
1.Знать сущность метода кинетостатики как особого методического приёма составления дифференциальных уравнений движения материальной точки и механической системы.
2.Уметь грамотно формулировать принцип аламбера для материальной точки и механической системы.
3.Уметь приводить к простейшему виду даламберовы силы инерции частиц твёрдого тела в случаях его поступательного, вращательного и плоскопараллельного движений.
4.Знать условия, при выполнении которых динамические давления вращающегося твёрдого тела на опоры равны нулю.
5.Знать о статической и динамической балансировках твёрдого тела.ДИ
16.2. Методические рекомендации к решению задач
Решение задач с помощью метода кинетостатики рекомендуется выполнять в следующей последовательности:
124
1. |
Изобразить на рисунке активные силы, приложенные к каждой из |
материальных точек механической системы. |
|
2. |
Освободить точки механической системы от наложенных связей, |
применив принцип освобождаемости от связей, изобразить реакции связей. |
|
3. |
Добавить к активным силам и реакциям связей даламберовы силы |
инерции материальных точек механической системы. |
|
С |
|
4. |
Выбрать систему координат. |
5. |
оставить уравнения равновесия активных сил, реакций связей и |
даламберовых с л |
нерции |
для |
каждой из материальных точек |
|||
механической с стемы. |
|
|
|
|
||
Задачи |
|
|
|
|||
6. |
Реш в составленную систему уравнений, определить искомые |
|||||
величины. |
|
|
|
|
|
|
|
, в которых тре уется определить полные реакции |
|||||
вращающегося твёрдого тела на ось вращения, рекомендуется решать в |
||||||
следующем порядке: |
|
|
|
|
||
1. |
Изобразить |
|
||||
Выбрать подв жные оси x, y, |
z, связанные с вращающимся твёрдым |
|||||
телом, направ в ось z вдоль оси вращения, а оси y и z расположить в |
||||||
плоскости, содержащей центр масс тела (можно начало координат |
||||||
совмест ть с одной опор тела). |
|
|
||||
2. |
|
на рисунке активные силы (в том случае, если |
||||
необходимо определить полные реакции опор на ось вращения). |
||||||
3. |
Изобразить на рисунке искомые реакции (это либо полные реакции |
|||||
опор, либо поперечные динамические реакции). |
|
|||||
4. |
Определить абсциссу и ординату центра масс тела. |
|||||
5. |
|
|
|
Д |
||
Вычислить центробежные моменты инерции тела Jyz и Jxz . |
||||||
6. |
Составить уравненияАкинетостатики. |
|||||
|
16.3. Контрольные вопросы для тестирования студентов |
|||||
1. |
Что называется |
даламберовой |
И |
|||
силой инерции материальной точки? |
||||||
Как направлена |
даламберова |
сила |
||||
инерции? |
|
|
|
|
||
Даламберова |
сила |
инерции Ф |
|
|||
равна произведению массы точки на |
||||||
вектор ускорения, взятому с |
||||||
обратным знаком: |
|
|
|
|
||
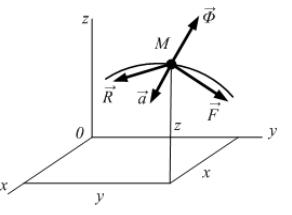
Ф= −ma .
2.Сформулируйте принцип Даламбера для материальной точки.
В общем случае форма записи принципа Даламбера для материальной точки есть равенство нулю векторной суммы активных сил, сил реакции и
сил инерции в любые моменты времени, т.е. F + R +Ф = 0 .
125
Форма записи уравнения движения несвободной материальной точки, по Даламберу, в виде уравнения без правой части напоминает уравнение равновесия статики, но отличается от него тем, что в динамике силы являются переменными величинами, при этом равенство сил соблюдается в любые моменты времени.
Для решения векторного уравнения выполняют его проецирование на оси координат:
Fx + Rx +Фx = 0 ; Fy + Ry +Фy = 0 ; Fz + Rz +Фz = 0 .
Представленные уравнения отражают принцип Даламбера для несвободной матер альной точки в проекциях на оси декартовых
координат. |
|
|
|
|
|
С |
|
|
|
|
|
3. К какому телу |
ложена сила инерции материальной точки и какие у |
||||
нее модуль |
направлен е? |
|
|
|
|
ла |
нерц |
материальной |
точки |
представляет |
собой |
|
матер альной точки изменению ее скорости и приложена |
||||
противодейств к телу, сообщающемубэтой точке ускорение. Сила инерции равна по
модулю про зведен ю массы материальной точки на модуль ее ускорения и направлена в сторону, противоположную ускорению: Ф = −ma .
4. Сформулируйте принципАДалам ера для механической системы.
При движении механической системы активная сила и реакция связи вместе с силой инерции о разуют уравновешенную систему сил для каждой точки системы
где Фk = −mk ak – сила инерции k-й точки.
5. По какой формуле определяется главный вектор даламберовых сил
инерции механической системы?
Fk + RkД+Фk = 0 ,
Главный |
вектор сил инерции системы равен произведению массы |
системы на |
ускорение центра масс и направлен в сторону, |
противоположную ускорению, т.е.
|
Ф = −mac . |
|
6. К чему приводятся даламберовы силы инерции при поступательном |
||
движении твёрдого тела? |
|
И |
Инерционные воздействия на тело приводятся к равнодействующей, равной главному вектору сил инерции Ф и приложенной в центре масс
тела: Ф = −maС .
Направлена равнодействующая в сторону, противоположную ускорению центра масс.
126

7. В чем заключается различие между дифференциальными уравнениями
относительного и абсолютного движений материальной точки?
Уравнение динамики относительного движения точки в случае непоступательного переносного движения можно рассматривать как абсолютное, если к действующим на точку силам присоединить переносную и кориолисову силы инерции:
maτ = ∑Fi +Фe +Фк .
8. К чему пр водятся даламберовы силы инерции точек твёрдого тела при
вращательном его дв жен |
вокруг главной центральной оси инерции? |
|||||
Инерц онные |
воздействия |
на |
тело |
|||
приводятся к паре с л, лежащей в плоскости, |
||||||
С |
оси |
|
вращения |
тела. |
||
перпенд кулярной |
|
|||||
Момент пары с л равен произведению |
||||||
момента |
нерц |
тела |
относительно |
оси |
||
вращен я на угловое ускорение и направлен в |
||||||
сторону, |
прот воположную |
угловому |
||||
ускоренПрию. решении задач находят |
||||||
модуль момента, а его направление |
||||||
показывают на р сунке дуговой стрелкой |
|
|||||
|
M |
Ф = J |
ε |
. |
|
|
|
бz z |
|||||
|
|
А |
||||
9. К чему приводятся силы инерции точек твердого тела при плоском
движении тела, имеющего плоскость материальной симметрии?
Если твердое тело, имеющее плоскость материальной симметрии, движется параллельно этой плоскости, то силы инерции приводятся к силе, приложенной в центре масс и равной главному вектору сил инерции ФС = −ma , и к паре сил, лежащей в плоскости симметрии, числовое
значение момента которой определяется формулой |
||
|
|
И |
M ФД= −J ε. |
||
C |
C |
|
10. К чему приводятся даламберовы силы инерции точек твёрдого тела, имеющего плоскость материальной симметрии, при вращательном его движении вокруг неподвижной оси, перпендикулярной этой плоскости?
Рассмотрим тело, имеющее плоскость симметрии и вращающееся вокруг неподвижной оси, перпендикулярной этой плоскости и не проходящей через центр масс тела (рис. а).
Таким образом, сложение сил инерции точек тела в этом случае движения сводится к сложению сил инерции точек плоской материальной фигуры, имеющей массу данного тела и тот же момент инерции
относительно оси вращения (рис. б). Как известно из статики, силу Ф* и
127
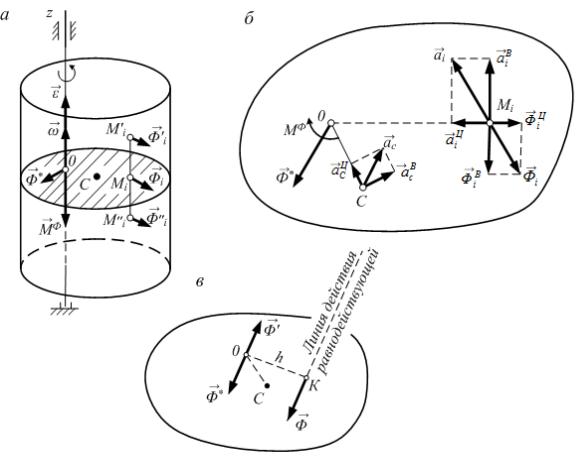
пару с моментом M Ф, лежащие в одной плоскости, можно заменить одной
действующей силой Ф, геометрически равной главному вектору (рис. в). Линия действия этой силы отстоит от центра приведения О на расстоянии
С |
h = |
M Ф |
|
|
. |
||
Ф |
|||
|
|
|
|
и |
|||
б |
|||
|
А |
||
|
Д |
||
Таким образом, при вращении твёрдого тела, имеющего плоскость |
|||
|
|
|
И |
материальной симметрии, вокруг оси, перпендикулярной этой плоскости, силы инерции точек тела приводятся к равнодействующей силе, лежащей в плоскости симметрии.
11. К чему приводятся силы инерции при равномерном вращении однородного тонкого стержня вокруг неподвижной оси?
На каждый элементарный участок стержня длиной ∆x и массой mk действует центробежная сила инерции, равная
Фk = mk ak = ml dx ak = ml dxω2 xsin α,
где x – координата элементарного участка стержня dx.
128
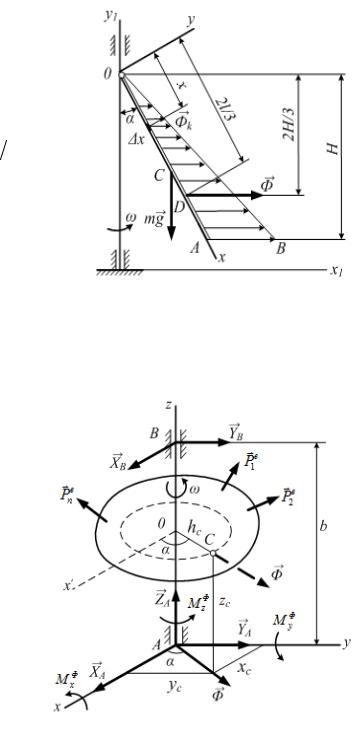
Из полученной формулы видно, что |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
эпюра сил инерции Фk |
|
является |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
линейной |
|
|
|
функцией |
|
|
|
х, |
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|||||||
равнодействующая Ф этих сил инерции |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
проходит |
|
через |
|
|
|
центр |
|
тяжести |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
треугольной эпюры, т.е. приложена в |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
точке D на расстоянии OD = 2l 3. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
По модулю равнодействующая сил |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
инерции равна про зведению массы |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
стержня на ускорен е его центра масс: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
СФ = ma = mω2 l sin α. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
c |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
12. Определ ть д намические реакции подшипников при вращении |
|||||||||||||||||||||||||||||||
твёрдого тела вокруг |
|
|
|
|
|
|
|
оси? |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
непоПусть твёрдое телодвижнойравномерно вращается с угловой скоростью ω |
|||||||||||||||||||||||||||||||
вокруг оси, закреплённой в подшипниках |
|
|
и В (рис.). |
|
|
|
|
|
|
||||||||||||||||||||||
Найдём |
|
|
|
|
|
|
д намические |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
n |
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
||||||||||||||||
реакции |
|
ХА, |
|
|
YA, ZA, |
|
|
XB, |
YВ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
подшипниковб, действующие на |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
ось, т. е. реакции, возникающие |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
при вращении тела. Пусть на тело |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
действуют заданные силы |
Pe , |
Pe , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
e |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
Д |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
. |
Обозначим |
|
проекции |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
...., P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
главного вектора этих сил на |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
координатные |
|
|
|
|
|
оси |
|
|
|
Axyz, |
|
|
|
|
|
|
|
И |
|||||||||||||
вращающиеся |
|
|
вместе |
с |
|
телом, |
|
|
|
|
|
|
|
||||||||||||||||||
через Rxe , Rye , Rze . Главные |
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
моменты относительно тех же осей |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
обозначим через M xe , |
M ye , |
M ze . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Так |
|
как |
|
тело |
|
вращается |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
равномерно, то M ze |
= 0. Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
X |
|
+ X |
|
= −Ф |
|
− mx |
ω |
2 |
; |
|
Y |
|
+Y |
= −Ф |
|
− my |
|
ω |
2 |
|
||||||||
|
|
|
A |
B |
x |
|
|
A |
y |
c |
|
; |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
B |
|
|
|
|
|
|
||||||
|
|
Z |
A |
= −Ф |
z |
; |
X |
B |
b |
= −M e |
− J |
xz |
ω2 |
; |
Y b = M e − J |
yz |
ω2 |
. |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
B |
|
x |
|
|
|
|
||||||
Уравнения определяют динамические реакции, действующие на ось равномерно вращающегося твёрдого тела, если осью вращения является ось Oz.
129