


9. ПЛОСКОПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
9.1. Рекомендации для проведения практического занятия
Цель практического занятия: отработка навыков решения задач на определен е скоростей точек при плоскопараллельном движении твердого тела.
Перед зучен ем данной темы необходимо повторить со студентами
понятия з курса математики: проецирование векторов на |
ось, правила |
Сренц рован я векторных функций скалярного |
аргумента. |
Необход мо также повторить перед занятием следующие вопросы из |
|
раздела «К немат ка»: спосо ы задания движения точки, основная задача |
|
кинемат ки точки, к нематические характеристики движения точки. |
|
Требован я к знан ям студента: |
|
диффе |
|
1. |
Уметь четко формулировать основные положения кинематики |
твердого тела. |
|
2. |
Знать четкое представление о сложении и разложении движений. |
3. |
Знать представление о классификации движений твердого тела. |
4. |
б |
Владеть методикой расчета кинематики простых механизмов. |
|
9.2. Методические рекомендации к решению задач
Задачи, относящиеся к данной теме, можно разбить на два типа. |
|||||
|
|
А |
|
||
Первый тип – это задачи на составление уравнений плоского |
|||||
движения и с их помощью определение скоростей точек плоской фигуры |
|||||
для произвольного момента времени, то есть как функции времени. |
|||||
В задачах этого типа определяются координаты той точки, скорость |
|||||
которой подлежит найти. |
Д |
||||
|
|
|
|||
Затем по формулам кинематики точки определяется ее скорость. |
|||||
Второй тип задач – это задачи на определение различных |
|||||
кинематических параметров при плоском движении тела для |
|||||
фиксированного момента времени. |
|
|
|
||
При |
решении |
таких |
задач |
рекомендуется |
следующая |
последовательность действий: |
|
И |
|||
|
|
|
|||
1.Записать условие задачи.
2.Изобразить кинематическую схему исследуемого механизма.
3.Пронумеровать звенья механизма.
4.Произвести анализ движения всех звеньев механизма.
66
5. Указать на схеме направление движения каждого звена. Для звеньев, движущихся поступательно, указать направление скорости, для вращающихся звеньев указать направление вращения, для звеньев, совершающих плоскопараллельное движение, указать направление
мгновенного вращения. |
|
6. |
Выбрать метод решения. |
С |
|
7. |
Записать необходимые теоремы и соотношения в общем виде. |
8. |
Записать указанные теоремы и соотношения в применении к |
данному механ зму.
9. Про звести необходимые геометрические построения. |
||||||
движен |
|
|
||||
10. Найти все вел ч ны, требуемые по условию задачи. |
||||||
11. Зап |
сать ответ. |
|
|
|
||
|
9.3. Контрольные вопросы для тестирования студентов |
|||||
1. |
Какое |
дв жен е |
твёрдого |
тела |
||
|
|
б |
||||
называется плоск м? |
|
|
|
|||
Плоскопараллельным |
(или |
плоским) |
||||
ем твёрдого тела называется такое |
||||||
движен е, при котором все точки тела |
||||||
движутся |
|
параллельно |
неподвижной |
|||
(основной) плоскости. |
|
|
|
|||
2. Как определяется движение тела при |
||||||
плоскопараллельном движении? |
|
|
||||
Движение |
тела при плоскопараллельном |
|||||
|
|
|
|
|
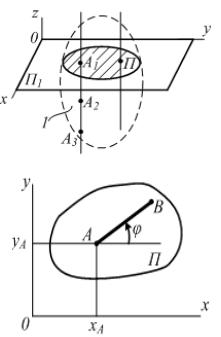
Д |
|
движении полностью определяется движением |
||||||
одного из его сеченийАв какой-либо из |
||||||
параллельных плоскостей, а положение |
||||||
сечения |
– |
положением |
двух |
точек |
этого |
|
сечения, например А и В.
параметрами – координатами хА, уА точки А и угломИφ, который образует отрезок АВ с осью Оx. Точку А, выбранную для определения положения сечения П, называют полюсом.
3. Какими параметрами задают положение сечения при
плоскопараллельном движении?
Положение сечения в плоскости можно задать тремя независимыми
При движении сечения тела его кинематические параметры являются функциями времени
хА=х(t); уА=у(t); φ=φ(t).
4. Из каких движений состоит плоскопараллельное движение?
Плоское движение представляет собой совокупность поступательного и вращательного движений, причём модель плоского движения тела можно
67
рассматривать как поступательное движение всех точек тела вместе с полюсом и вращение тела относительно полюса.
Траектории поступательного движения тела зависят от выбора полюса. Вращение тела от выбора полюса не зависит.
5. Назовите основные виды движения плоской фигуры.
Положение плоской фигуры определяется тремя параметрами:
координатами полюса xс = f1(t); yс = f2 (t) и углом поворота относительно |
|||
полюса |
ϕс = f3 (t). Основными видами движения плоской |
фигуры |
|
являются поступательное движение вместе с полюсом с и вращательное |
|||
движен е относ тельно полюса. Причём поступательное движение зависит |
|||
от выбора полюса, а вращательное от выбора полюса не зависит. |
|
||
С |
|
|
|
6. |
формул руйте теорему Шаля. |
|
|
Плоскую ф гуру можно переместить из одного положения в любое |
|||
другое положен е на |
одним поворотом этой фигуры вокруг |
||
некоторого неподв жного |
центра. Предельным положением |
центра |
|
плоскости поворота являетсябточка неподвижной плоскости, с которой в данный
момент совпадает мгновенный центр скоростей плоской фигуры. Эта точка называется мгновенным центром вращения фигуры.
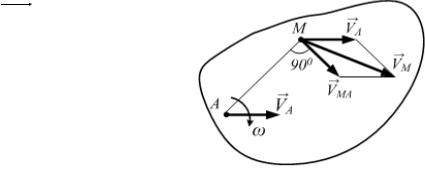
7. Какую точку плоской фигуры называют мгновенным центром скоростей?
Точка P плоской фигуры, скорость которой в данный момент времени равна нулю, называется мгновенным центром скоростей (МЦС). Мгновенный центр скоростей плоской фигуры находится на перпендикуляре к направлению скорости точки VM на расстоянии от
разложения плоского движения на поступательное и вращательное?
точки, равном VM / ω. |
|
А |
|
8. Как определяется скорость любой точки плоской фигуры при |
|
|
Д |
Скорость любой точки плоской фигуры равна геометрической сумме
скорости полюса VA и вращательной скорости этой точки относительно
полюса VMA :
VM =VA +VMA .
Вектор VMA = ω× AM перпендикулярен
M с
И
Скорость точки изображается диагональю параллелограмма, построенного на скорости полюса и вращательной скорости точки вокруг полюса.
68

9. Что представляет собой неподвижная и подвижная центроиды и что
происходит с центрами при действительном движении плоской фигуры?
Кривая, представляющая геометрическое место мгновенных центров вращения на неподвижной плоскости, называется неподвижной центроидой.
Кривая, представляющая геометрическое место мгновенных центров скоростей, неизменно связанная с подвижной плоской фигурой, называется подвижной центроидой. При действительном движении плоской ф гуры подв жная центроида катится без скольжения по неподв жной центро де (теорема Пуансо).
|
10. Назов те следств я из теоремы о скоростях точек плоской фигуры. |
||||||||||||||||
|
|
ледств е |
|
|
|
1. |
|
Проекции |
|
|
|||||||
С |
|
|
|
|
|
|
|
|
|
||||||||
скоростей точек плоской фигуры на |
|
|
|||||||||||||||
прямую, |
|
|
х соед няющую, равны |
|
|
||||||||||||
между собой ( |
с. а), т.е. |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
VB cos β =VA cosα . |
|
|
|
||||||||
|
Следств е 2. Концы скоростей |
|
|
||||||||||||||
ри |
|
|
|
||||||||||||||
точек не зменяемого отрезка лежат |
|
|
|||||||||||||||
на одной прямой |
делят эту прямую |
|
а |
||||||||||||||
на |
|
части, |
пропорциональные |
|
|
||||||||||||
расстояниям |
|
|
|
|
|
|
между |
|
|
||||||||
|
|
|
|
|
|
б |
|
|
|||||||||
соответствующими точками (рис. ): |
|
|
|||||||||||||||
|
|
|
A1D1 |
= |
A1d1 |
|
или |
|
|
|
|||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
A B |
A b |
|
|
|
|
|
|
|
|
|||||
|
|
A1D1 |
1 |
1 |
|
1 1 |
A1D1 |
|
|
|
|
|
|||||
|
|
|
|
AD |
|
|
|
AD |
|
|
|
||||||
|
|
|
|
|
|
= AB и |
|
|
|
|
А |
|
|||||
|
|
A1B1 |
|
|
|
D1B1 |
|
||||||||||
|
|
|
|
|
= |
DB . |
|
|
б |
||||||||
|
11. Назовите основные кинематические характеристики плоского движения |
||||||||||||||||
тела. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Основными характеристиками тела при |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
||
плоском движении являются: траектория |
И |
||||||||||||||||
движения полюса, угол вращения тела |
|||||||||||||||||
вокруг полюса, скорость и ускорения |
|||||||||||||||||
полюса, угловая скорость и угловое |
|||||||||||||||||
ускорение тела. Дополнительные оси О1x1y1 |
|||||||||||||||||
при |
|
|
|
|
поступательном |
|
движении |
||||||||||
перемещаютcя вместе с полюсом А параллельно основным осям Оxy по траектории движения полюса.
12. Как определить скорость полюса, угловую скорость и угловое ускорение при плоском движении?
69
Скорость полюса плоской фигуры можно определить с помощью производных по времени от уравнений:
|
|
|
|
|
|
|
|
dхA |
|
|
|
dyA |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
V |
Ax |
= |
; V |
Ay |
= |
; |
|
V |
|
|
= V |
2 |
+V 2 |
. |
|
|||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
dt |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
dt |
|
|
|
A |
|
|
|
|
Ax |
Ay |
|
|
||||||
Аналогично |
определяют |
угловые |
|
характеристики |
тела: |
угловую |
||||||||||||||||||||
скорость ω= |
dϕ |
; угловое ускорение ε = |
dω |
= |
d 2 |
ϕ |
. |
|
|
|
|
|||||||||||||||
dt |
dt |
|
dt |
2 |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
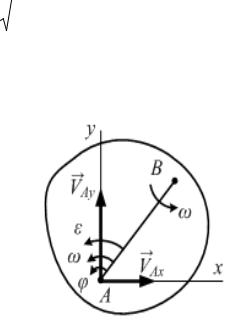
13. Как показать проекции вектора скорости при |
|
|
|
|
||||||||||||||||||||||
плоском дв жен |
? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
В полюсе А показаны проекции вектора |
|
|
|
|
||||||||||||||||||||||
скорости VA |
на оси Аx, Аy. Угол вращения тела φ, |
|
|
|
|
|||||||||||||||||||||
С |
ω |
|
угловое |
ускорение |
ε |
|
|
|
|
|||||||||||||||||
угловая |
скорость |
|
|
|
|
|
|
|||||||||||||||||||
показаны дуговыми стрелками вокруг точки А. |
|
|
|
|
|
|
||||||||||||||||||||
В связи |
с |
незав с мостью |
вращательных |
|
|
|
|
|||||||||||||||||||
характер ст |
|
|
дв жен я |
от |
вы ора |
|
|
полюса |
|
|
|
|
||||||||||||||
угловые |
характер ст |
|
|
φ, |
ω, |
ε |
|
можно |
|
|
|
|
||||||||||||||
ки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
показывать в лю ой точке плоской фигуры |
|
|
|
|
||||||||||||||||||||||
дуговыми стрелками, например в точке В. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
14. Как определяются ускорения точек свободного твёрдого тела? |
|
|||||||||||||||||||||||||
Ускорениебточки сво одного твёрдого тела равно геометрической |
||||||||||||||||||||||||||
сумме ускорения полюса, осестремительного ускорения и её |
||||||||||||||||||||||||||
вращательного ускорения, определённых относительно мгновенной оси и |
||||||||||||||||||||||||||
оси углового ускорения, проходящего через полюс: |
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Д |
||||||||||||||
|
|
|
|
|
|
|
|
|
a = a |
+ a |
|
+ a . |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
А0 вр oc |
|
|
|||||||||||||||||
15. Дайте определение относительного, переносного и абсолютного |
||||||||||||||||||||||||||
движения точки. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Движение |
точки |
по |
отношению |
к |
|
подвижной |
системе |
отсчёта |
||||||||||||||||||
называют относительным движением точки. |
|
|
И |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Движение подвижной системы отсчёта и неизменно связанного с ней тела по отношению к неподвижной системе отсчёта является для точки переносным движением.
Движение точки по отношению к неподвижной системе отсчёта называют абсолютным.
16. Как определяется абсолютная скорость точки в составном движении?
Абсолютная скорость точки равна геометрической сумме её переносной и относительной скоростей: V =V e+Vr .
Так как абсолютная скорость точки определяется диагональю параллелограмма, построенной на переносной скорости V e и
относительной скорости Vr , то её модуль можно вычислить по формуле
70
V= 
 Ve2 +Vr2 + 2VeVr cos(Ve ,Vr ).
Ve2 +Vr2 + 2VeVr cos(Ve ,Vr ).
17.Как определяется абсолютное ускорение точки при непоступательном переносном движении?
В случае непоступательного переносного движения абсолютное ускорение равно геометрической сумме переносного, относительного и
кориолисова (поворотного) ускорений: |
|
|
||||
|
|
а |
= аe + ar + ak . |
|
|
|
18. Как определяется абсолютное ускорение точки при поступательном |
||||||
переносном дв жен |
|
? |
|
|
|
|
ускорение |
|
|
|
|||
В случае поступательного переносного движения абсолютное |
||||||
ускорен е равно геометр ческой сумме её переносного и относительного |
||||||
С |
|
|
Кориолиса равно нулю, т.е. |
|
||
ускорен й: а = аe + ar , |
|
ak = 0 . |
||||
19. Каковы пр ч ны появления кориолисова (поворотного) ускорения? |
||||||
б |
(поворотного |
ускорения) |
||||
Появлен е |
ускорения |
Кориолиса |
||||
обуславл вается двумя причинами:
а) вследств е относ тельного движения точки, перемещающейся по отношен ю к подв жной системе отсчёта, изменяется переносная скорость точки;
б) вследствие вращательного переносного движения дополнительно изменяется направление относительной скорости по отношению к неподвижной системе отсчёта.
20. Каковы модуль и направление |
ускорения |
Кориолиса |
и при каких |
||||||
условиях ускорение равно нулю? |
Д |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
Модуль ускоренияАКориолиса а = 2(ω ×V ) ; а |
= 2ω V |
sin(ω |
e |
,V ). |
|||||
|
k |
|
e r |
k |
e |
r |
|
r |
|
Направление ускорения Кориолиса определяется по правилу |
|||||||||
векторного произведения. |
|
|
|
|
|
|
|
|
|
Ускорение Кориолиса равно нулю в трёх случаях: |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||
а) если ωe = 0 ; б) если Vr = 0 |
|
|
И |
||||||
; в) если угол между вектором |
ωe |
и Vr |
|||||||
|
|
|
|
|
|
|
|
|
|
равен нулю или π, т. е. в случае, |
когда относительная скорость точки Vr |
||||||||
21. Что представляет собой абсолютное движение тела, которое участвует в нескольких вращениях вокруг сходящихся мгновенных осей?
Если твёрдое тело одновременно совершает вращение вокруг нескольких мгновенных осей, пересекающихся в одной точке, то результирующим движением будет вращение с угловой скоростью ω абсолютного вращения тела, равной геометрической сумме скоростей составляющих движений:
ω= ∑k ωk .
i=1
71

|
22. Как определить направление вектора |
|||||
ускорения Кориолиса при помощи правила |
||||||
векторного произведения? |
|
|
||||
|
огласно |
|
векторному |
уравнению |
||
|
вектор ускорения Кориолиса аk |
|||||
ak |
= 2(ωe ×Vr ) |
|||||
С |
|
перпендикулярный |
||||
есть |
третий |
вектор, |
||||
векторам ωe |
и Vr |
и направленный так, что, |
||||
cмотря навстречу вектору аk , видим поворот |
||||||
вектора |
ωe к вектору Vr , происходящий против |
|||||
равила |
|
|||||
вращен я часовой стрелки. |
|
|
||||
|
23. |
Как |
определ ть |
направление |
||
вектора ускорен я Кор олиса при |
помощи |
|||||
п |
|
Жуковского? |
|
|
||
|
|
бr |
||||
|
Чтобы найти |
направление |
вектора |
|||
ak , необход мо спроецировать вектор |
||||||
относительной скорости Vr |
на плоскость, |
|||||
перпенд кулярную |
оси |
переносного |
||||
|
|
|
|
А |
||
вращения и проходящую через точку М, и |
||||||
повернуть эту проекцию V ' |
в плоскости |
|||||
на угол 90º в направлении переносного вращения.
24. Как определяется угловая Дскорость твёрдого тела, вращающегося
вокруг двух параллельных осей в одном направлении?
Модуль абсолютной угловой скорости равен сумме модулей угловых скоростей составляющих вращений: ω= ωe + ωr . Мгновенная ось
абсолютного вращения плоской фигуры лежит в плоскости, проходящей через оси переносного и относительного вращенийИ, и будучи им параллельной, делит расстояние между осями внутренним образом на части, обратно пропорциональные угловым скоростям.
25. Как определяется угловая скорость твёрдого тела, вращающегося
вокруг двух параллельных осей в разных направлениях?
Модуль абсолютной угловой скорости равен разности угловых скоростей составляющих вращений: ω= ωr −ωe .
Мгновенная ось абсолютного вращения плоской фигуры параллельна осям переносного и относительного вращений и лежит в плоскости, проходящей через эти оси, угловая скорость вращения вокруг которой больше. Расстояния между осью абсолютного вращения и осями переносного и относительного вращения обратно пропорционально угловым скоростям.
72