


4.ПРОИЗВОЛЬНАЯ ПЛОСКАЯ СИСТЕМА СИЛ
4.1.Рекомендации для проведения практического занятия
Цель практического занятия: приобретение навыков решения задач на равновесие произвольной плоской системы сил.
Перед изучением данной темы рекомендуется повторить со студентами следующ е вопросы из курса математики: правила действия над векторами; прав ла построения векторных многоугольников; векторов на оси и плоскости. Необходимо также повторить
вопросы |
з раздела «Статика»: основные виды связей; |
правила |
|
С |
|
||
определен я направлен я реакций связей; момент силы относительно |
|||
неподв жного центра; теорему Вариньона о моменте равнодействующей; |
|||
пары |
с л |
х свойства; определение равнодействующей |
системы |
распределенных с л. |
|
||
Требован я к знан ям студента: |
|
||
проецирован |
|
||
1. |
Знать содержан е осо енности решения основной задачи статики. |
||
2. |
Знать акс омы статики и следствия из них. |
|
|
3. |
Уметь правильно формулировать и применять необходимые и |
||
достаточные условия равновесия произвольной плоской системы сил. |
|||
4. |
|
б |
|
Знать теорему Вариньона (теорема о моменте равнодействующей). |
|||
|
|
4.2. Методические рекомендации к решению задач |
|
|
|
А |
|
Задачи на равновесие твердого тела, находящегося под действием плоской системы сил, можно условно разбить на три основных типа:
1.Задачи на равновесие плоской системы параллельных сил.
2.Задачи на равновесие плоской системы сил, расположенных произвольно.
3.Задачи на равновесие твердого тела, которое может опрокидываться.
Процесс решения задач первого и второго типа сводится к следующим операциям:
1.Выбрать объект равновесия, т.е. тело, к которому как заданные силы, так и силы, которые требуется определить в данной задаче.
2.Изобразить на рисунке все заданные (активные) силы, действующие на объект равновесия; если в число активных сил входят распределенные по тому или иному закону нагрузки, то на рисунке нужно заменить их предварительно найденными равнодействующими.
3.Выбрать декартову систему координат; при этом рекомендуетсяДИ
одну из координатных осей проводить перпендикулярно возможно большему числу неизвестных сил.
24
4. Выявить все наложенные на объект равновесия связи и, применив принцип освобождаемости от связей, приложить к нему реакции связей.
5. Установить, какая система сил действует на объект равновесия, выяснить число неизвестных величин и убедиться, что задача статически определимая.
6. оставить уравнения равновесия для полученной системы сил; при этом рекомендуется за центр, относительно которого вычисляются моменты сил, брать точку, в которой пересекается наибольшее число линий действ я не звестных сил.
7. Реш ть с стему полученных уравнений, определить неизвестные
величины |
провести анализ полученных результатов. |
|
Если на тело наряду с силами действуют и пары сил, лежащие в одной |
||
С |
|
|
плоскости |
действующими силами, то при составлении уравнений |
|
сил |
||
равновес я в уравнен я проекций сил на оси пары не войдут, так как |
||
сумма проекц й |
пары на лю ую ось равна нулю. В уравнениях же |
|
моментов к моментам |
л при авится алгебраическая сумма моментов пар |
|
, так как сумма моментов сил пары относительно любого центра равна |
||
моменту пары. При решении некоторых задач следует учитывать трение |
||
качения. На |
|
значение момента трения качения определяется по |
формуле M= δN, гдеАδ – коэффициент трения качения, N – модуль нормального давления.
большее
В тех случаях, когда по условию задачи требуется определить давление тела на опоры, нужно найти равные по модулю этим давлениям соответствующие реакции связей, а затем направить искомые давления противоположно найденным реакциям.
Процесс решения задач третьего типа сводится к следующим операциям:
1.Выделить твердое тело, возможность опрокидывания которого проверяется.
2.Изобразить на рисунке все заданные силы, действующие на тело.
3.Определить опору, относительно которой может произойти опрокидывание тела.
4.Составить уравнение моментов заданных сил относительно этой
опоры.
5.Решив уравнение, определить искомую величину (предельную силу или предельный размер).
Задачи этого типа решаются в предположении, что твердое тело начинает отрываться от одной из опор. Поэтому реакцию этой опоры
учитывать не следует. Тогда при равновесии тела реакция оставшейся опоры должна уравновешиваться равнодействующей заданных сил.ДИ
25

Это означает, что линия действия равнодействующей заданных сил проходит через оставшуюся опору и, следовательно, момент равнодействующей относительно точки опоры равен нулю.
4.3. Контрольные вопросы для тестирования студентов
С |
|
1. |
Что такое произвольная плоская система сил? |
Линии действия сил находятся в одной плоскости. |
|
2. |
Что называется моментом силы относительно точки? |
Моментом с лы относительно точки О на |
|
линиюдейств я с лы АВ.
плоскости называется произведение модуля силы на её плечо относ тельно этой точки, взятое со знаком плюс или минус:
Mo =±Fd.
Плечом d с лы F относительно точки O называют
дл ну перпенд куляра, опущенного из точки O на
б Момент силы относительноАточки O будем считать положительным,
3. Когда момент с лы относительно точки положительный, а когда
отрицательный?
если сила F стремится повернуть плоскость чертежа вокруг точки O в сторону, противоположную движению часовой стрелки, и отрицательным,
если по часовой. |
Д |
4. Запишите момент силы относительно точки как векторное произведение.
Вектор момента силы МО относительно точки можно рассматривать как векторное произведение радиуса вектора r, проведённого из центра
момента в точку приложения силы, на вектор силы F.
5. Назовите условия равновесия плоской системы параллельных сил?
n |
n |
|
Исилы |
∑Fiy = 0; |
∑MO (Fi ) = 0 . |
||
i=1 |
i=1 |
||
6. Чему равен |
|
векторный момент |
|
относительно точки?
Векторным моментом силы относительно точки называют вектор, приложенный в этой точке и равный по модулю произведению силы на плечо силы относительно этой точки, расположенный
26

перпендикулярно плоскости, в которой лежат сила и моментная точка, и направленный так, чтобы, смотря навстречу вектору, видеть силу, стремящуюся вращать тело против движения часовой стрелки:
|
|
|
|
МО (F) |
= Fh . |
||||
7. формулируйте теорему Вариньона о моменте равнодействующей. |
|||||||||
С |
|
|
|
|
|
|
|
|
|
Момент равнодействующей плоской системы сходящихся сил |
|||||||||
относительно любой точки равен алгебраической сумме моментов |
|||||||||
слагаемых с л относ |
тельно этой же точки. |
||||||||
8. Нап ш те три формы уравнений равновесия плоской системы сил. |
|||||||||
и |
n |
|
|
||||||
|
n |
|
n |
|
|
||||
Первая форма: |
∑Fix |
= 0 ; |
∑Fiy |
= 0 |
; ∑МO (Fi ) = 0. |
||||
|
i=1 |
|
i=1 |
|
i=1 |
|
|
||
|
n |
|
n |
МВ |
|
|
n |
||
Вторая форма: |
∑МА(Fi ) = |
0; ∑ |
(Fi ) = 0 ; |
∑Fiх = 0 . |
|||||
i=1 |
|
i=1 |
|
|
|
|
i=1 |
||
б |
|
||||||||
Третья форма: |
n |
|
n |
|
|
|
; |
||
∑МА |
(Fi ) = 0 ; ∑МВ (Fi ) = 0 |
||||||||
|
i=1 |
|
i=1 |
|
|
|
|
||
|
n |
0. |
|
|
|
|
|
|
|
∑МС (Fi ) = |
|
|
|
|
|
|
|||
i=1 |
А |
||||||||
9. Задана составная конструкция (система двух тел), соединенных |
|||||||||
шарниром А. Покажите усилия в шарнире |
(рис. a). |
||||||||
Усилия в шарнире |
показываются |
по третьему закону Ньютона |
|||||||
(аксиома равенства действия и противодействия). Усилия в точке А на втором теле показывают направленными противоположно усилиям на первом теле (рис. б).
Д
10. Каким свойством обладает центр тяжести? |
|
Сила, с которой тело притягивается к Земле, называется силой |
|
|
И |
тяжести. Направление сил притяжения отдельных частиц тела к Земле практически параллельны между собой. Равнодействующая этих параллельных сил, равная их сумме, есть вес тела, а центр этой системы сил, в котором приложен вес тела, называется центром тяжести. В твердом теле центр тяжести не зависит от расположения тела в пространстве. Сила тяжести являются характеристиками гравитационного притяжения тела к Земле. Вектор силы тяжести тела является мерой гравитационного
притяжения тела к центру Земли. Вес тела − это модуль вектора силы
27
тяжести, который определяется по формуле закона всемирного тяготения
как функция расстояния RЗ |
|
от тела до центра Земли: F = mg0 = m GГ mЗ , |
||||||||||||||||||||||||||||||||||||||||
где m − масса тела; |
|
|
g0 − вес 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RЗ2 |
||||||||||||||||||
|
|
кг массы тела в поле тяготения Земли, |
||||||||||||||||||||||||||||||||||||||||
имеющий размерность Н/кг; |
GГ |
|
− |
|
универсальная |
|
гравитационная |
|||||||||||||||||||||||||||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= 6,673 10−11; |
m |
− масса Земли, |
||||||||||||||||||||||
постоянная, которая имеет значение G |
Г |
|||||||||||||||||||||||||||||||||||||||||
mЗ |
=5,98 1024 |
кг. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
11. В как х точках земной поверхности сила тяжести имеет наибольшее и |
|||||||||||||||||||||||||||||||||||||||||
координаты |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
наименьшее значен я? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
На больш й вес тело имеет на полюсе, а наименьший − на экваторе. |
|||||||||||||||||||||||||||||||||||||||||
|
12. По как м формулам вычисляется положение центра тяжести |
|||||||||||||||||||||||||||||||||||||||||
однородного тела? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Рад |
|
|
|
б |
|
|
|
тяжести |
однородного тела |
||||||||||||||||||||||||||||||||
|
ус-вектор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
центра |
||||||||||||||||||||||||||
определяются по формулам |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
n |
|
|
||||
|
|
∑rk ∆Gk |
|
|
|
|
|
|
|
|
∑xk ∆Gk |
|
|
|
|
|
|
|
∑yk ∆Gk |
|
|
|
∑zk |
∆Gk |
|
|||||||||||||||||
|
r = |
k=1 |
|
|
|
|
; |
x |
c |
|
= k =1 |
|
|
; |
|
y |
c |
= |
k =1 |
|
|
; |
z |
c |
= |
k =1 |
|
, |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
c |
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
G |
|
||||||
где |
r , |
x |
|
|
; |
y |
|
; |
z |
|
|
А |
|
центров |
тяжести |
|||||||||||||||||||||||||||
|
c |
|
c |
|
|
c |
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
отдельных частей тела. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
13. По каким формулам определяются координаты объема тела, плоских |
|||||||||||||||||||||||||||||||||||||||||
фигур и линии? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
||||||||||||||||||||||||
|
Координаты объёма тела определяются по формулам |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑xk ∆Vk |
|
|
|
|
∑yk ∆Vk |
|
|
|
|
|
|
∑zk ∆Vk |
|
|
|||||||||||||||||||
|
|
|
|
|
xc = |
k =1 |
|
|
|
|
|
; |
|
|
yc = |
k =1 |
|
|
|
|
|
|
|
; |
|
zc = |
k =1 |
|
|
|
. |
|
|
|||||||||
|
|
|
|
|
|
|
|
V |
|
|
|
|
V |
|
|
|
|
|
|
V |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|||||||||
|
Координаты центра тяжести пластинок (плоских фигур) определяются |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑xk |
∆Sk |
|
|
|
|
|
∑yk ∆Sk |
|
|
|
|
|
|
|
|||||||||||||
по формулам |
|
|
|
xc |
= |
k =1 |
|
|
; |
|
yc |
= k =1 |
S |
|
. |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Координаты центра тяжести линий определяются по формулам |
|
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
∑xk ∆lk |
|
|
∑yk |
∆lk |
|
|
|
|
∑zk ∆lk |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
xc = |
k =1 |
|
|
|
|
; yc = |
k =1 |
|
|
|
|
|
; |
zc |
= k =1 |
|
|
. |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
l |
|
|
|
l |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
||||
14. Какими вспомогательными теоремами пользуются при определении положения центра тяжести?
Теорема 1. Если однородное тело имеет ось симметрии, то центр тяжести тела находится на этой оси.
28
Теорема 2. Если однородное тело имеет плоскость симметрии, то его центр тяжести находится в этой плоскости.
Теорема 3. Объём тела вращения, полученного вращением плоской фигуры вокруг оси, лежащей в плоскости фигуры, но не пересекающей её, равен произведению площади фигуры на длину окружности, описанной её центром тяжести.
Теорема 4. Площадь поверхности вращения, полученной вращением плоской кривой вокруг оси, лежащей в плоскости этой кривой, но её не пересекающей, равна произведению длины этой кривой на длину окружности, оп санной её центром тяжести.
15. Как ми способами можно определить положение центра тяжести |
||||||
площади в случае, если звестны положения центров тяжести отдельных её |
||||||
С |
|
|
|
|
|
|
частей? |
|
|
|
|
|
|
а) Метод групп ровки или раз иения. |
|
|
|
|||
определ ть центры тяжести отдельных частей фигуры, то центр |
||||||
тяжести можно определ ть по формулам |
|
|
|
|
||
|
n |
|
|
|
n |
|
Если |
|
|
|
∑yk Sk |
|
|
|
∑xk Sk |
|
|
|
|
|
xc = |
k=1 |
; |
yc |
= |
k =1 |
, |
S |
S |
|||||
где S1,S2 – площади фигур, о разующих заданное тело; S – площадь |
||||||
б |
|
|
|
|||
А |
||||||
заданной фигуры; xk, yk – координаты центров тяжести площадей S1, S2 .
б) Метод отрицательных площадей. |
|
Если в пластине имеется отверстие, то отверстие рассматривается как |
|
отрицательная площадь. |
Д |
|
|
16. Дайте определение плоской ферме.
Фермой называют жёсткую, геометрически неизменяемую конструкцию, образованную из стержней, соединенных шарнирами. Если все стержни фермы лежат в одной плоскости, ферму называют плоской. Точки, в которых пересекаются стержни фермыИ, называют узлами. Все внешние нагрузки к ферме прикладываются только в узлах. При расчете фермы трением в узлах пренебрегают, а вес стержней распределяют по узлам фермы.
17. Расчет фермы. Сформулируйте леммы о нулевых стержнях?
Лемма 1. Если в незагруженном узле плоской фермы сходятся два стержня, то усилия в них равны нулю (схема а).
Лемма 2. Если в незагруженном узле плоской фермы сходятся три стержня, из которых два расположены на одной прямой, то усилие в третьем стержне равно нулю. Усилия в первых двух стержнях равны между собой (схема б).
29
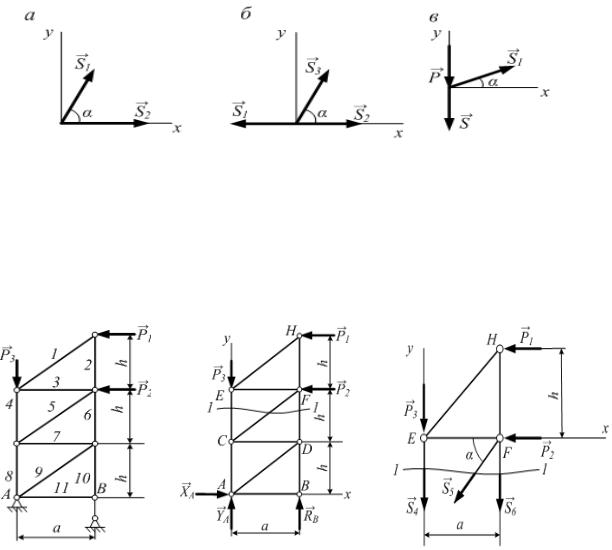
Лемма 3. Если в загруженном узле плоской фермы сходятся два стержня и к узлу приложена внешняя сила, линия действия которой совпадает с осью одного из стержней, то усилие в этом стержне равно по модулю приложенной силе, а усилие в другом стержне равно нулю (схема в).
С |
|
числен |
|
18. Расчет фермы. В чём заключается сущность способа вырезания узлов? |
|
пособ вырезан я узлов состоит в том, что мысленно вырезают узлы |
|
фермы, пр кладывают к ним соответствующие внешние силы и реакции |
|
стержней |
б |
составляют по два уравнения равновесия сил, приложенных к |
|
данному узлу. Реакц стержней направляют от узлов. Если в результате |
|
вы |
й получат ответ со знаком минус, то соответствующий стержень |
сжат, если знак плюс, то стержень растянут.
19. Расчет фермы. В чём заключается сущность метода Риттера? |
|
|
А |
|
И |
а |
бДв |
Дана ферма (рис. |
а). Определить усилия в стержнях S4 , S5 , S6 . |
В ферме проводится сечение, рассекающее не более трёх стержней (рис. б). Мысленно отбрасываем одну из частей фермы, заменяя её действие реакциями, направленными по стержням в сторону отброшенной части (рис. в). Для определения известных усилий в стержнях составляем уравнения моментов относительно точек пересечения стержней (точки Риттера: Е и F). Если два рассеченных стержня параллельны 4 и 6 (нет точки Риттера), то составляют уравнение проекций сил на ось, перпендикулярную данным стержням, т.е. проекцию на ось x. Если усилие в стержне имеет знак минус, то стержень сжат, если знак плюс, то стержень растянут.
30