


11. ДИНАМИКА ТОЧКИ
11.1. Рекомендации для проведения практического занятия
Цель практического занятия: приобретение практических навыков
составлен я |
нтегр рования дифференциальных уравнений движения |
||
свободной |
несвободной материальных точек. |
|
|
Перед |
зучен ем данной темы рекомендуется повторить со |
||
студентами следующ е вопросы из курса математики: основные правила |
|||
Сдифференц рован я скалярных и векторных функций скалярного |
|||
аргумента одной переменной, определенные и неопределенные интегралы, |
|||
дифференц альные уравнения с разделяющимися переменными и их |
|||
б |
|
||
интегр рован е, л нейные дифференциальные уравнения с постоянными |
|||
коэфф ц ентами (однородные и неоднородные) и их интегрирование, |
|||
задачаКошив теор д фференциальных уравнений. |
|
||
Следует повтор ть со |
студентами следующие вопросы из |
раздела |
|
|
А |
точки, |
|
«Кинемат ка»: спосо ы |
задания движения материальной |
||
определение скорости и ускорения точки при векторном, координатном и естественном спосо ах задания движения точки, естественные оси, естественный трехгранник.
Требования к знаниям студента:
2. Знать содержание и особенности решения первой и второй задач динамики материальной точки.
1. Уметь четко формулироватьДзаконы классической механики.
3. Уметь составлять и интегрировать дифференциальные уравнения движения материальной точки в декартовых и естественных координатах в случаях действия на нее постоянной силы, а также силы, зависящей от скорости и положения точки в пространстве. И
11.2. Методические рекомендации к решению задач
Задачи динамики точки делятся на две большие группы:
1.Задачи, в которых по заданному закону движения точки находятся действующие на нее силы.
2.Задачи, в которых по заданным силам, действующим на точку,
определяется ее закон движения.
Первая группа задач решается в такой последовательности:
1. Выбрать систему координат, если она не указана в условии задачи.
78
2. |
Изобразить на расчетной схеме материальную точку в |
|
произвольном положении и активные силы, действующие на точку. |
||
3. |
Освободиться от связей, наложенных на материальную точку, |
|
заменив их реакциями связей, и показать их на расчетной схеме. |
||
4. |
Определить по заданному закону движения проекции ускорения на |
|
оси координат. |
|
|
С |
|
|
5. |
оставить дифференциальные уравнения движения материальной |
|
точки в проекциях на оси координат. |
||
6. |
Из с стемы д фференциальных уравнений определить искомую |
|
величину. |
|
|
Вторая группа задач решается в такой последовательности: |
||
1. |
Изобраз ть с стему координат, если она не указана в условии |
|
задачи. |
|
|
2. |
Изобраз ть на расчетной схеме материальную точку в |
|
произвольном положен |
и активные силы, действующие на точку. |
|
3. |
Освобод ться от |
связей (в случае несвободной материальной |
точки), наложенныхбна материальную точку, заменив их реакциями связей, и показать х на расчетной схеме.
4.Состав ть д фференциальные уравнения движения материальной точки в проекциях на оси координат.
5.Записать начальные условия движения.
6.Найти общее решение дифференциальных уравнений движения.
7.Определить постоянные интегрирования, используя начальные условия.
8.Подставив постоянные интегрирования в общее решение, определяем закон движения точки.
При свободном движении материальной точки удобнее пользоваться
прямоугольной системой координатД. Естественные оси координат используют при изучении криволинейного движения точки.
11.3.Контрольные вопросы для тестирования студентов
1.Как классифицируют в динамике силы, действующие на точки механической системы? И
Силы, действующие на систему несвободных точек можно разделить
на:
•задаваемые (активные силы и реакции связей);
•внешние и внутренние ( Fe и Fi ).
Внешними называются силы, действующие на точки системы со стороны точек, не входящих в состав системы.
Внутренними силами называют силы взаимодействия между точками данной системы.
79

2. Какая система отсчета называется инерциальной?
Системы координат, в которых относительное движение точки по отношению к подвижной системе отсчета, движущейся поступательно прямолинейно и равномерно, происходит так же, как и по отношению к неподвижной системе, называются инерциальными.
истема отсчета, в которой проявляются первый и второй законы, называется инерциальной системой отсчета. Для большинства задач за такую систему отсчета можно принять систему осей, связанных с Землей.
3. Назов те две основные задачи динамики точки, которые решаются с помощью д фференц альных уравнений движения материальной точки.
• Первая задача д намики. |
x = f1(t), y = f2 (t) , |
|
Зная массу точки m и уравнения ее движения |
||
С |
|
|
z = f3(t) , найти модуль и направление равнодействующей сил, |
||
приложенных |
точке. |
|
• Вторая задача д намики. |
|
|
Зная с лы, |
действующие на точку, ее массу m , |
а также начальное |
положенточкие ее начальную скорость, получить уравнения движения |
||
точки. |
|
|
4. Опишите последовательность решения первой задачи динамики точки. |
|||||||||||||||||||
Зная массу точки и закон её движения, можно найти силу, |
|||||||||||||||||||
б |
|
|
|
|
|
|
|||||||||||||
действующую на точку. Действительно, если, например, заданы уравнения |
|||||||||||||||||||
|
А |
|
|
||||||||||||||||
движения точки в декартовой системе координат |
|
|
|||||||||||||||||
|
x=f1(t); |
|
|
у=f2(t); |
|
|
z=f3(t), |
|
|
||||||||||
|
|
|
|
|
|
|
|
Д |
|||||||||||
то проекции силы на оси координат определяются из дифференциальных |
|||||||||||||||||||
уравнений движения точки, т. е. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
F |
= m |
d 2 x |
; |
F |
y |
= m |
d 2 y |
; |
F |
= m |
d 2 z |
. |
|
|
|||||
x |
|
|
dt2 |
|
|
|
dt2 |
|
|
z |
|
dt2 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
||||
Зная проекции силы на координатные оси, можно определить модуль |
|||||||||||||||||||
силы и косинусы углов силы с осями координат: |
|
|
|||||||||||||||||
|
|
|
|
F = F 2 |
+ F 2 |
|
+F z2 ; |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
x |
|
y |
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
Fy |
|
|
|
F |
|
|||||
cos(F, x) = |
|
x |
; |
|
cos(F, y) = |
|
|
|
; |
cos(F, z) = |
z |
. |
|||||||
F |
|
|
|
F |
F |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
5. Опишите последовательность решения второй задачи динамики точки.
По заданной массе и действующей на точку силе необходимо определить уравнение движения этой точки. Рассмотрим решение задачи в
прямоугольной декартовой системе координат. В общем случае сила F , а следовательно, и ее проекции на координатные оси могут зависеть от
80
времени, координат движущейся точки, скорости, ускорения и т.д. Для простоты ограничимся случаем зависимости силы и ее проекций на оси координат от времени, координат и скорости.
Дифференциальные уравнения движения точки имеют вид
mx = Fx (t; x, y, z; x, y |
, z); my = Fy (t; x, y, z; x, y, z); |
mz = Fx (t; x, y, z; x, y, z) . |
С |
|
|
Для нахождения уравнений движения точки в декартовых |
||
координатах необходимо проинтегрировать систему трех обыкновенных |
||
дифференц альных уравнений второго порядка. Из теории обыкновенных |
||
дифференц альных |
уравнений известно, |
что решение одного |
дифференцального уравнения второго порядка содержит две произвольные постоянные.
Для случая с стемы трех обыкновенных дифференциальных
уравнен й второго порядка имеется шесть произвольных постоянных:
Для выделен я конкретного вида движения материальной точки надо дополн тельно задать условия, позволяющие определить произвольные
будетC1,…, C6.
постоянные, которых в о щем случае |
шесть. |
||
В качестве таких условий задают |
|
||
начальные условия, т.е. в какой-то |
|
||
определенный |
момент |
времени, |
|
например при t=0 , задают координаты |
|
||
движущейся точки и проекции ее |
|
||
скорости на координатные оси: |
|
|
|
х=х0; у=у0А; z=z0; |
|||
х =V0x ; |
y =V0 y ; z =V0z . |
|
|
Значения параметров при начальныхДусловиях подставляют в уравнения, полученные при интегрировании исходныхИдифференциальных уравнений, и определяют значение постоянных интегрирования С1,…,С6. После этого уравнения переписывают с учетом найденных значений постоянных и определяют искомые параметры.
Следует обратить внимание, что составленные дифференциальные уравнения описывают движение точки лишь до тех пор, пока на нее действуют вошедшие в правые части уравнений силы и пока сохраняются соответствующие законы взаимодействия. Если с какого-то момента времени действия некоторых сил прекращаются или начинают действовать новые силы, то для последующего движения надо составлять новые дифференциальные уравнения; при этом положение и скорость точки в конце предшествующего движения будут начальными для нового движения.
81
Кроме того, в некоторых случаях закон взаимодействия может быть таким, что при изменении направления движения будет изменяться вид
дифференциального |
уравнения |
(или |
уравнений) этого |
движения |
|||
(например, при действии силы трения или силы сопротивления, |
|||||||
пропорциональной |
квадрату |
скорости). |
Поэтому, |
составив |
|||
дифференциальное уравнение движения, надо проверить, сохраняет ли оно |
|||||||
С |
|
|
|
|
|
||
свой вид при изменении направления движения, если такое изменение |
|||||||
может произойти. Когда вид уравнения изменяется, надо для движений в |
|||||||
одну |
в |
другую |
сторону составлять свои уравнения, поступая с |
||||
начальными услов ями так же, как в случае, когда на точку начинают |
|||||||
действовать |
новые |
с лы. Прежде чем |
интегрировать составленные |
||||
дифференц альные уравнения движения, надо все переменные силы в правых частях уравнен й представить в явном виде как функции соответствующ х аргументов.
При дв жен |
точки в плоскости Оxy имеется два дифференциальных |
|||||
уравнен я дв жен я. |
В решения этих |
уравнений |
входят четыре |
|||
вольные постоянные. |
|
|
|
|
||
произ |
|
|
|
|
||
Постоянные определяются из начальных условий: |
|
|
||||
при |
t=t0=0 |
x=x0; y=y0; |
х |
=V0x ; |
y |
=V0 y . |
б |
|
|
|
|
||
В случае прямолинейного движения точки имеется только одно дифференциальное уравнение и в его решение входят две произвольные
постоянные. Для их определения необходимо задать начальные условия:
при |
t=t0=0 |
x=x0; |
х =V0x . |
6. Основные законыАмеханики (законы Галилея-Ньютона): |
|||
а) Закон инерции. Материальная точка сохраняет состояние покоя или |
|||
равномерного прямолинейного движения до тех пор, пока действие других |
|||
тел не изменит это состояние. |
|
И |
|
б) Закон пропорциональностиДсилы и ускорения. Ускорение материальной точки пропорционально приложенной к ней силе и имеет одинаковое с ней направление.
в) Закон равенства действия и противодействия. Всякому действию соответствует равное и противоположно направленное противодействие.
г) Закон независимости действия сил. Несколько одновременно действующих на то чку сил сообщают точке такое ускорение, какое сообщила бы ей одна сила, равная их геометрической сумме.
7. Какое уравнение называется основным уравнением динамики?
Соотношение, устанавливающее связь между силой F , массой m и ускорением a материальной точки называется основным уравнением динамики
F = ma .
82
8. Какова мера инертности твердых тел при поступательном движении?
В классической механике масса движущего тела принимается равной массе покоящегося тела, т. е. она рассматривается как постоянная величина, являющаяся мерой инертности тела.
9. Как определяются постоянные при интегрировании дифференциальных уравнений движения материальной точки?
Значения постоянных интегрирования определяют по начальным условиям движения:
to ; xo ; yo ; zo ; xo ; yo ; zo .
Эти значен я подставляют в уравнения, представляющие общие |
||||
радиуса |
|
|
||
решен я д фференц альных уравнений движения точки. |
||||
С10. Как е уравнен я динамики являются |
||||
уравнен ями дв жен я материальной точки в |
||||
декартовых осях коорд нат? |
|
|
||
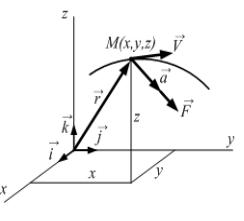
Если |
б2 |
|||
ускорен е |
а |
точки |
М |
|
определ ть |
как вторую |
производную |
от |
|
-вектора r , то д фференциальное |
||||
уравнен е дв жен я материальной точки |
||||
можно зап сать в в де |
|
|
|
|
|
А |
|||
|
d |
2 |
|
|
m |
dt |
|
= F. |
|
Если спроецировать о е части векторного уравнения на координатные |
||||
оси, то можно получить дифференциальные уравнения движения точки в декартовых осях координат:
max = Fx; may = Fy; maz = Fz.
Проекции ускорения на координатные оси можно выразить через
производные: |
|
|
d 2 x |
|
|
|
|
|
|
И |
|||||||||||
а |
х |
= |
dV |
x |
= |
= x; а |
у |
= |
dVу |
= |
d 2 у |
= у; а |
z |
= |
dV |
z |
= |
d 2 z |
= z. |
||
|
|
2 |
|
|
|
|
|||||||||||||||
|
|
|
dt |
|
dt |
|
|
|
Д2 2 |
||||||||||||
|
|
|
|
|
|
|
|
dt |
|
dt |
|
|
|
dt |
|
|
dt |
|
|||
Дифференциальные уравнения движения материальной точки в |
|||||||||||||||||||||
прямоугольной декартовой системе координат имеют вид |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
mx = Fx ; |
|
|
mу = Fу; |
mz = Fz . |
|
|
|
|
|||||||
Частные случаи. Если известно, что материальная точка движется в одной и той же плоскости, то, принимая ее за координатную плоскость
Оxy, имеем |
mу = Fу . |
mx = Fx ; |
|
|
|
В этом случае z=0 и, следовательно, Fz = 0. |
|
В случае движения точки по |
прямой линии, направив по ней |
83

координатную ось Оx, получим одно дифференциальное уравнение прямолинейного движения точки
mx = Fx .
11. Какие уравнения динамики являются естественными уравнениями движения материальной точки?
Для естественных осей координат |
|
|
|||||||||||
|
|
|
|
maτ =Fτ; |
|
man = Fn; |
mab = Fb, |
||||||
где аτ, аn, аb |
|
Fτ, Fn, Fb – соответственно проекции ускорения и |
|||||||||||
равнодействующей с лы на касательную, |
главную нормаль и бинормаль к |
||||||||||||
траектор |
|
рассматр ваемом положении движущейся точки. |
|||||||||||
СОпредел ускорен я точки |
|
|
|
||||||||||
aτ = |
d 2s |
; |
an |
= |
V 2 |
ab=0, |
|
|
|||||
dt2 |
ρ |
; |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
где ρ – рад |
|
ус кр в зны траектории. |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
уравнениями |
||||
Естественными |
|
|
|
|
|||||||||
движен я точки являются |
|
|
|
|
|
|
|||||||
|
|
|
|
|
V 2 |
|
|
|
|
|
; |
||
mS = ∑F cos(F |
,τ); m |
|
|
= ∑F cos(F |
,n) |
||||||||
i |
|
i |
|
|
|
|
ρ |
|
|
i |
i |
|
|
|
б |
||||||||||||
|
|
∑Fi |
cos(Fi |
,b) |
= |
0. |
|
|
|
|
|||
12. В чем состоит сущность принципа относительности классической |
|||||||||||||
механики? |
|
|
|
|
|
|
|
|
|
|
|
|
|
Принцип относительностиАклассической механики можно |
|||||||||||||
сформулировать |
так: |
никакие |
механические явления, происходящие в |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
Д |
||
среде, не могут обнаружить ее прямолинейного и равномерного |
|||||||||||||
поступательного движения. |
|
|
|
|
И |
||||||||
13. Как формулируется золотое правило механики?
То, что выигрывается в силе, теряется в скорости.
14. Сформулируйте уравнение относительного движения точки в векторной форме.
Материальная точка движется относительно неинерциальной системы отсчета так же, как и относительно инерциальной, если к действующим активным силам и реакциям связей добавить переносную и кориолисову
силы инерции, т.е. |
|
|
|
|
|
|
|
||||
|
mar = F |
+ R +Фе +Фk , |
|||
|
|
|
|
|
|
где Фе = −mae ; |
Фk = −mak |
называют |
|
соответственно переносной и |
|
кориолисовой силами инерции.
84

15. Сформулируйте дифференциальные уравнения относительного движения точки.
Дифференциальные уравнения
относительного движения точки в проекциях на декартовы оси координат
С |
+Ф +Ф ; |
|||
mx |
= F |
+ R |
|
|
|
x |
|
x ex kx |
|
|
|
|||
mу |
= Fу + Rу +Фeу +Фkу; |
|||
|
|
|
|
|
mz = Fz + Rz +Фez +Фkz . |
||||
16. Назов те услов е относительного покоя материальной точки?
Матер альная точка находится в состоянии относительного покоя, если геометр ческая сумма приложенных к точке сил и переносной силы инерции равны нулю, т. .
|
∑Fi +Фe = 0 . |
|
17. Чем |
|
падающих тел к востоку? |
отклонение |
|
|
Тела, падающ е на землю, незначительно отклоняются от вертикали |
||
на восток за счет того, что сила инерции Кориолиса направлена на восток:
объясняется
АФк = 2m ωе Vr cosϕ,
где ϕ – широта, на которой находится точка.
18. В каком направлении отклоняется тело, брошенное вертикально вверх?
Тело, брошенное вертикально вверх, отклоняется от вертикали на запад, т. к. сила инерции Кориолиса в этом случае направлена перпендикулярно плоскости меридиана к западу.
19. Какие модули и направления касательной и нормальной сил инерции
материальной точки? |
|
И |
||
При неравномерном криволинейном движении точки силу инерции |
||||
|
|
|
|
|
представим в виде двух сил: касательнойДФ и нормальной Ф . Эти силы |
||||
|
τ |
|
|
n |
направлены противоположно касательному и нормальному ускорениям: |
||||
|
|
; Фn = mV |
2 |
|
Фτ = −maτ; |
Фn = −man ; Фτ = m dV |
|
, |
|
|
dt |
ρ |
|
|
где ρ – радиус кривизны траектории движения точки. |
|
|
||
20. При каком движении материальной точки равна нулю ее касательная |
||||
сила инерции и при каком |
– нормальная? |
|
|
|
В случае равномерного движения точки по кривой Фτ = 0 . В случае равномерного движения точки по прямой Фn = 0.
85

21. По каким формулам вычисляются модули вращательной и центробежной сил инерции точки, принадлежащей твердому телу,
вращающемуся вокруг неподвижной оси?
Если точка принадлежит твердому телу, вращающемуся вокруг неподвижной оси, то модули ее вращательной и центробежной сил
инерции определяются по формулам |
Ф = mRω2 . |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
Ф = mR |
|
ε |
|
; |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
τ |
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
где ε, ω– угловое ускорение и угловая скорость тела. |
|
|
|
|||||||||||||||||||||
|
22. Какой модуль |
какое направление имеют переносная и кориолисова |
||||||||||||||||||||||
силы инерц |
|
|
? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Переносная с ла |
нерции численно равна произведению массы на |
||||||||||||||||||||||
переносное ускорен е и направлена противоположно переносному |
||||||||||||||||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ускорен ю: |
|
Фe = −mae . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Кор ол сова с ла |
|
|
численно равна произведению массы на |
||||||||||||||||||||
ускорен е |
|
|
направлена противоположно |
|
|
|
ускорению |
Кориолиса: |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ф = −ma . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
к |
к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
нерции |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
23. Как определяются переносная и кориолисова силы инерции в |
|||||||||||||||||||||||
различных случаях переносного движения? |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
Если переносное движение – неравномерное вращение вокруг |
|||||||||||||||||||||||
неподвижной оси, то переносная сила инерции имеет две составляющие: |
||||||||||||||||||||||||
|
|
|
б |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
= −maв |
и центро ежную |
|
|
|
|
|
|||||||||||||
вращательную Фв |
Фц = −maц; |
Ф |
=Фц |
+Фв. |
||||||||||||||||||||
|
|
|
|
e |
|
е |
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
е |
е |
e |
е |
|
Переносная |
вращательная |
|
|
|
сила |
|
|
инерции |
|
|
направлена |
||||||||||||
|
|
|
|
|
|
Фв |
||||||||||||||||||
противоположно вращательному ускорению, а ее модуль |
e |
|
||||||||||||||||||||||
|
|
|||||||||||||||||||||||
|
|
|
|
|
Ав |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
Фe |
= mR εе , |
|
|
|
|
|
|
|
|
|
|
|
|||||
где R – расстояние до оси вращения (радиус вращения). |
|
|
|
|||||||||||||||||||||
|
Переносная |
центробежная |
|
|
|
сила |
|
|
инерции |
Фц |
направлена |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
противоположно центростремительному ускорению, т. е. направлена по |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Д |
||||||||||||||
радиусу от оси вращения, а ее модуль Фц = mRω2 . |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
||
|
Сила |
|
|
|
|
|
|
|
|
= −maк |
|
|
направлена противоположно |
|||||||||||
|
инерции Кориолиса Фк |
|
|
|||||||||||||||||||||
ускорению Кориолиса, и ее модуль Фк = 2m |
|
ωе |
|
|
|
Vr |
|
|
|
|
||||||||||||||
|
|
|
|
|
||||||||||||||||||||
|
|
|
sin(ωe |
,Vr ). |
|
|||||||||||||||||||
|
24. Переносное движение – равномерное вращение вокруг неподвижной |
|||||||||||||||||||||||
оси. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
||||||
|
При |
равномерном |
вращении |
тела |
|
|
εе=0 |
и |
|
|
|
|||||||||||||
|
|
|
Фτ=0. Уравнение |
|||||||||||||||||||||
ma |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
= F + R |
+Ф + |
Ф принимает форму ma |
= F |
|
+ N +Фn +Ф . |
|
||||||||||||||||||
r |
|
|
|
е |
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
k |
|
25. Переносное движение – неравномерное вращение вокруг неподвижной
оси.
86
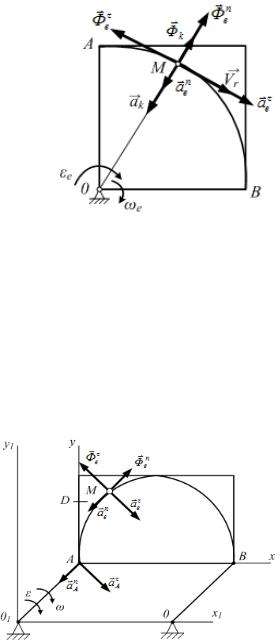
В данном случае точка М перемещается
по траектории АМВ и, вращаясь вместе с твёрдым телом, имеет вращательное и центростремительное ускорения, поэтому переносная сила инерции имеет две составляющие:
|
|
Ф =Фτ |
+Фn , |
|
|
|
|
|
|
|
|
|
|
|||||||
|
= −ma |
е |
|
|
|
е |
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
где Фτ |
τ – |
|
переносная |
|
вращательная |
|
|
|
|
|
||||||||||
е |
е |
|
Фn = −man – |
|
|
|
|
|
|
|
|
|
|
|||||||
сила |
нерц |
; |
|
|
|
переносная |
|
|
|
|
|
|||||||||
|
|
|
|
|
е |
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
центробежная |
с ла |
|
|
нерции. |
Уравнение |
|
|
|
|
|
||||||||||
ma = F + R +Ф +Ф |
|
пр нимает форму |
|
|
|
|
|
|
|
|||||||||||
r |
|
е |
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
ma = F + N +Фτ +Фn |
+Ф . |
|
|
|||||||||||||
Здесь Фτ |
= maτ |
|
|
|
|
|
|
|
|
е |
е |
|
|
|
k |
|
|
|||
= mε |
e |
r; Фn = man |
= mω2 |
r, |
где r – |
расстояние от |
||||||||||||||
|
е |
|
|
e |
|
|
|
|
|
|
е |
e |
|
e |
|
|
|
|
||
до оси переносного вращения. Кориолисова сила инерции Фk |
||||||||||||||||||||
точки |
|
|
|
|
|
|
|
|
|
|||||||||||
определяется по формуле |
Фk = |
|
2mωe Vr sin(ωe ,Vr ). |
|
|
|||||||||||||||
26. Переносное движение – поступательное криволинейное и |
||||||||||||||||||||
неравномерное движение. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Представлен |
|
|
|
|
|
|
|
|
случай |
|
|
|
|
|
|
|
||||
|
б |
|
|
|
|
|
|
|||||||||||||
криволинейного |
|
|
поступательного |
|
|
|
|
|
|
|
||||||||||
движения тела D на двух |
|
|
|
|
|
|
|
|||||||||||||
кривошипах, при котором все точки |
|
|
|
|
|
|
|
|||||||||||||
этого |
тела движутся |
по |
круговым |
|
|
|
|
|
|
|
||||||||||
траекториям |
|
|
|
|
А |
|
|
|||||||||||||
радиусом |
|
|
r=O1A |
и |
|
|
|
|
|
|
|
|||||||||
имеют |
одинаковые |
скорости |
и |
|
|
|
|
|
|
|
||||||||||
ускорения. Точка М перемещается по |
|
|
|
|
|
|
|
|||||||||||||
траектории АМВ. |
|
|
|
|
|
|
|
|
|
|
Д |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Переносные ускорения точки М равны соответствующим ускорениям, |
||||||||||||||||||||
например точки А: aeτ |
=a Aτ ; |
aen =a An . |
|
|
|
|
|
|
|
|||||||||||
Переносная угловая скорость тела равна нулю: ωе=0 |
и |
Фk=0. |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Ф =Фτ +Фn , |
|
|
И |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
е |
е |
e |
|
|
||||
где Фτ |
= −ma |
τ – |
переносная |
|
|
|
|
|
|
|||||||||||
касательная сила |
инерции; |
Фn = −man – |
||||||||||||||||||
е |
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
е |
|
переносная нормальная сила инерции.
Уравнение mar = F + R +Фе +Фk принимает форму ma = F + N +Феτ +Феn .
87
|
|
dV |
|
|
V 2 |
|
||
Здесь Фτ = maτ = m |
e |
; |
Фn = ma |
n |
= m |
e |
, |
|
|
|
|||||||
е |
е |
dt |
е |
|
ρ |
|
||
|
|
|
|
|
|
|||
где ρ – радиус кривизны траектории переносного движения, ρ=О1А.
27. Переносное движение – поступательное прямолинейное равномерное.
При равномерном |
поступательном |
переносном |
движении aе = 0 ; |
|||||
С |
|
|
|
|
|
|
||
Фе = 0. В |
этом |
случае |
из уравнения |
mar = F + R +Фе +Фk |
получаем |
|||
уравнен е |
относ |
тельного движения mar = F + R, |
которое |
совпадает с |
||||
уравнен ем дв жен я точки относительно инерциальной системы отсчёта.
нципе |
|
Все подв жные с стемы отсчёта, которые движутся поступательно, |
|
равномерно |
прямол нейно относительно основной инерциальной |
системы отсчёта, называют инерциальными. Относительно всех инерциальных с стем отсчёта получаются одинаковые уравнения
движен я матер альной |
точки. Ускорения материальной точки в |
||||
б |
|
|
|||
инерциальных с стемах отсчёта одинаковы. |
|
|
|||
28. Расскаж те о пр |
относительности классической механики. |
||||
Пр нц п |
относ тельности |
классической |
механики |
можно |
|
сформул ровать |
следующим о разом: динамические процессы и |
||||
|
А |
|
|||
механические явления в |
различных инерциальных системах протекают |
||||
одинаково в соответствии с законами Ньютона, и никакими приборами наблюдатель, находящийся в инерциальной системе, не может отличить прямолинейное равномерное движение системы от состояния покоя.
|
|
|
|
|
Д |
|
|||||||
29. Расскажите о движении точки относительно поверхности Земли. |
|
||||||||||||
Сила |
тяжести P |
тела на |
поверхности |
Земли есть |
геометрическая |
||||||||
сумма силы гравитационного притяжения и переносной силы инерции. |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Направление |
вектора |
силы тяжести |
P |
противоположно вектору N – |
|||||||||
нормальной опорной реакции. |
Направление вектора силы тяжести P у |
||||||||||||
поверхности Земли определяет направление вертикали в данной точке, а |
|||||||||||||
плоскость, перпендикулярная вектору силы тяжести |
|
является |
|||||||||||
P , |
|||||||||||||
горизонтальной плоскостью в данной точке поверхности Земли. |
|
|
|||||||||||
Движение точки вблизи поверхности Земли можно описать |
|||||||||||||
дифференциальным уравнением относительного движения |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
. И |
|||||
|
|
|
|
mar = P +Фe |
+Фk |
||||||||
Переносные силы инерции для неподвижных тел на Земле являются |
|||||||||||||
малыми |
величинами. |
|
Сила |
инерции, |
обусловленная |
|
кориолисовым |
||||||
ускорением, |
равна |
|
|
|
|
|
|
|
– |
скорость |
|||
Фk = −mak = −m2(ωз ×Vr ), где |
Vr |
||||||||||||
материальной точки относительно поверхности Земли.
88