

4.4.2.5.Возвратно-поступательное движение
Возвратно-поступательное движение широко распространено как в биологических объектах, так и в технике. В живых организмах оно осуществляется с помощью специальных белковых молекул. В частности, сокращение мускулов у высших животных происходит в результате пошагового взаимодействия концевых групп миозина с волокнами актина (рис. 3.20).
В нанотехнике для организации возвратно-поступательного движения могут быть использованы ротаксановые и псевдоротаксановые структуры, речь о которых шла выше. Например, "искусственный мускул" может быть сконструирован из нескольких параллельно соединенных звеньев, изображенных на рис. 3.21.
Пример конкретной молекулы, опробованной в качестве одного из двух одинаковых элементов такого звена, дан на рис. 3.22.
Интересные возможности предоставляют ротаксаны с тремя и более промежуточными "станциями" на линейной молекуле и полиротаксаны с несколькими кольцевыми молекулами. С их помощью можно обеспечить многопозиционное дискретное перемещение с высокой точностью (порядка 0,1 нм); позиционирование других молекул перед сборкой; выполнение логических операций

Рис.3.20. Схема работы мышцы с нарастающим увеличением от а и б к в и г.


Рис.3.21.
![]()
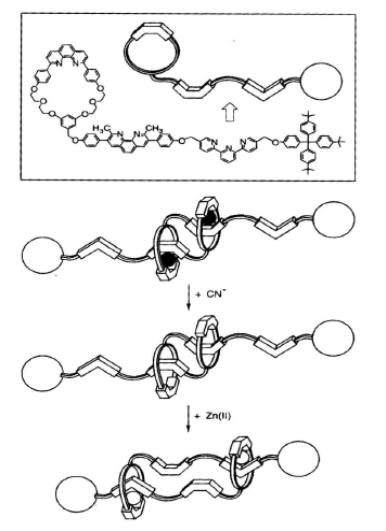
Рис.3.22. Пример конкретного ротаксаного димера, управляемого химически и природного для конструирования искуственного мускула.
запоминание информации, т.е. они могут играть роль суппорта в традиционном станке, транспортера, манипулятора, работающих с высокой скоростью и максимально возможной в природе точностью - субатомарной. Их состояние

Рис.3.23. Ротаксан с тремя промежуточными “станциями”- состояниями с локальным минимом энергии.
может управляться химическими, электрическими или оптическими воздействиями.
Синтезировано и опробовано значительное число подходящих для этих целей супрамолекулярных структур. Пример одной из них дан на рис. 3.23.
4.4.2.6.Схемы сборки путем нанизывания кольцевых молекулярных
структур на линейные
Для сборки-разборки различных молекулярных устройств большое значение имеет возможность нанизывания кольцеобразных молекул на линейные и рассоединения их при необходимости (рис. 3.24).

Рис.3.24. Схематическое изображение сборки-разборки для трех молекулярных комплексов:
![]()

Рис.3.25. Изменение свободной энергии Гиббса G в процессе сборки и разборки молекулярного комплекса.
Ряд ротаксановых супрамолекулярных структур предоставляет такую возможность, причем многие из них легко управляются светом или электрическим полем. Длительное существование в собранном виде без участия внешних воздействий, очевидно, возможно лишь в том случае, когда взаимодействие кольцевой части системы, надетой на линейную, приводит к понижению свободной |-энергии (рис.3.25).
Проиллюстрируем эти положения несколькими конкретными примерами.
На рис. 3.26 показана схема процесса захвата кольцевой молекулой одной из двух линейных молекул, расположенных поблизости. Вторая линейная моле

Рис.3.26. Схема селективного захвата из раствора кольцевой молекулой одной из двух стержневых и ориентация оставшегося снаружи комплекса.

Рис.3.27. Молекулярный комплекс, в котором операции сборки-разборки инициируются электрохимическими реакциями окисления-восстановления.
кула при этом также позиционируется определенным образом, устанавливаясь снаружи от кольца параллельно захваченной первой. Добавление к раствору n-Bu3N приводит к обмену местами линейных молекул, а добавление протонсо-держащих примесей - к восстановлению исходного состояния.
Таким образом, здесь происходит химически управляемое образование тех или иных псевдоротаксановых комплексов с упорядоченным расположением трех молекул друг относительно друга.
Гораздо удобнее управлять процессами молекулярного монтажа/демонтажа с помощью электрического тока, сообщающего или отбирающего электронный заряд у комплекса (рис. 3.27).
Обратимая сборка-разборка супрамолекулярного комплекса осуществляется здесь за счет окислительно-восстановительных реакций в результате потери или приобретения электрона.
Интересно отметить, что три состояния, реализующиеся в изображенном процессе, легко различимы невооруженным глазом, поскольку при образовании псевдоротаксана раствор окрашивается в изумрудно-зеленый цвет, а при декомпозиции комплекса - в коричневый или ярко-синий (в зависимости от того, окислена или восстановлена линейная молекула). Помимо чисто механических устройств это делает описанную систему привлекательной и для конструирования различных индикаторов и дисплеев.
На рис. 3.28 изображен супрамоле-кулярный комплекс, который образуется в результате самосборки благодаря до-норно-акцепторному взаимодействию п-электронов, принадлежащих разным молекулам. Освещение приводит к диссоциации псевдоротаксана вследствие перераспределения зарядов в комплексе.
В гетерогенных системах, более привлекательных для практики, продемонстрирована возможность самосборки псевдоротаксанов на твердой подложке (рис. 3.29).
В частности, показано, что процесс, изображенный на рис. 3.29, можно осуществить, предварительно адсорбировав на подходящей поверхности одну из взаимодействующих молекул.

Рис.3.28. молекулярный комплекс, в котором операции сборки-разборки иициируются светом,вызывающим перераспределение зарядов в комплексе.

Рис.3.29. Схематическое изображение самосборки молекулярного комплекса с предварительным закреплением на твердой подложке одной из его частей:
а- стержневой;б- кольцевой

Рис.3.30. Схема сборки-разборки ротаксанового молекулярного комплекса с помощью зонда атомно-силового микроскомп:
![]()
Учитывая большую популярность зондовых нанотехнологий, осуществляемых с помощью атомно-силовых микроскопов , покажем и принципиальную схему образования одиночного псевдоротаксанового комплекса посредством манипулирования единичными молекулами (рис. 3.30).
В итоге отметим, что наличие подходящего набора органических молекул позволяет собирать из них, как из детского конструктора, практически весь спектр машин и приборов нанометровых размеров, необходимых для наноэлек-троники и наноробототехники. При этом нет нужды изготавливать каждую деталь в отдельности, как в традиционном производстве. Они или уже есть в природе, и их необходимо выделить из биообъектов, или могут быть получены посредством несложного химического синтеза в громадных количествах. Причем, в отличие от изготавливаемых человеческими руками, они абсолютно идентичны, т.е. не имеют никакого разброса параметров.
Это упраздняет понятие "допуск" при изготовлении, так как природа при создании определенной молекулы действует строго в соответствии с законами квантовой механики, которые не допускают никаких отклонений от номинала.
Итак, в описанном направлении нанотехнология стоит на пути создания массовых сборочных производств приборов и машин нанометровых размеров из отдельных функциональных молекул, подобно тому как собирается на конвейере автомобиль из отдельных деталей.