

4.2.2. Вращение твердого тела вокруг неподвижной оси
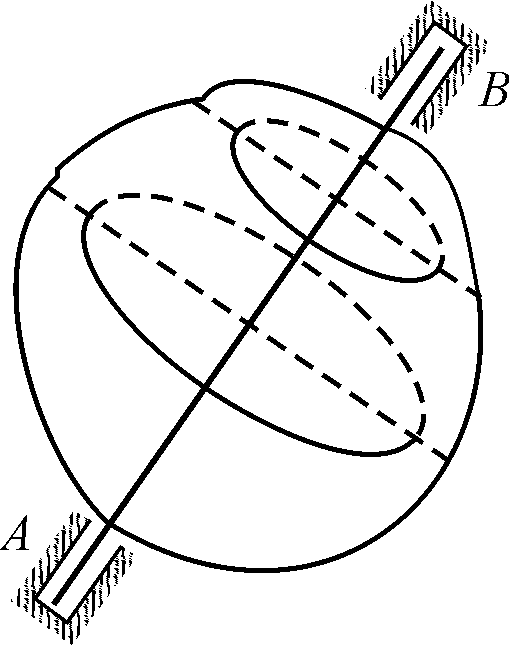
Рассмотрим движение твердого тела с двумя неподвижными точками А и В (рис. 4.4). Из условия неизменяемости расстояния между любыми точками тела вытекает, что все точки на прямой АВ остаются неподвижными. Прямая АВ называется осью вращения, а движение тела называется вращательным. Нетрудно видеть, что все точки тела описывают дуги окружностей с центрами на ось вращения.
Рис. 4.4. |
Рис. 4.5. |
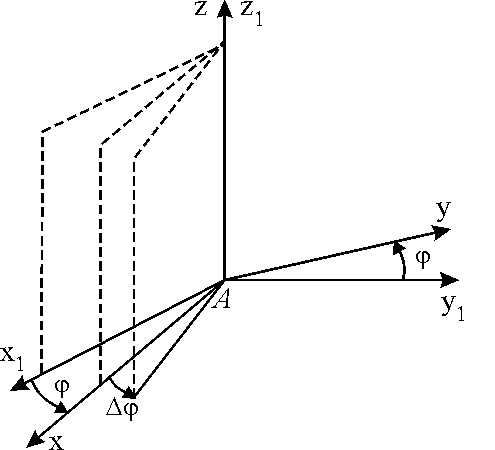
Направим ось Аz1 неподвижной системы координат Аx1y1z1 по оси вращения тела. Введем подвижную систему координат Axyz, жестко связанную с телом, ось Az которой так же направим по оси вращения (рис. 4.5). Положение тела будет однозначно определено углом поворота тела
между неподвижной плоскостью x1Аz1 и подвижной плоскостью xAz (рис. 4.5). Условимся считать положительным направлением отсчета направление против хода часовой стрелки, если смотреть с конца оси Oz1.
Пусть в момент
времени
угол между неподвижной полуплоскостью
x1Аz1
и подвижной полуплоскостью хАz
равен
![]() ,
а в момент времени
,
а в момент времени
![]() равен
равен
![]() .
Это значит, что за промежуток времени
подвижная плоскость, а следовательно,
и тело повернулись на угол
.
Это значит, что за промежуток времени
подвижная плоскость, а следовательно,
и тело повернулись на угол
![]() .
.
Отношение
![]()
называется средней угловой скоростью тела за промежуток времени .
Предел этого
отношения при
![]() называется угловой скоростью тела
в данный момент времени
называется угловой скоростью тела
в данный момент времени
![]() . (4.5)
. (4.5)
Единица измерения угловой скорости в системе СИ есть 1/с.
Вектором угловой скорости твердого тела, совершающего вращение вокруг неподвижной оси, называется вектор, модуль которого равен абсолютному значению производной угла поворота тела по времени, направленный вдоль оси вращения в ту сторону, откуда вращение тела видно происходящим против хода часовой стрелки
![]() . (4.6)
. (4.6)
Из этой формулы
следует, что при
![]() направление вектора
направление вектора
![]() совпадает с направлением вектора k,
а при
совпадает с направлением вектора k,
а при
![]() вектор
направлен в сторону, противоположную
направлению вектора k.
вектор
направлен в сторону, противоположную
направлению вектора k.
В технике часто при равномерном вращении тела пользуются числом оборотов в минуту. Зависимость между угловой скоростью и числом оборотов в минуту определяется по следующей формуле:
![]() ,
,
где ![]() – число
оборотов в минуту.
– число
оборотов в минуту.
Предположим, что
в момент времени
угловая скорость вращения равна
![]() ,
а в момент
равна
,
а в момент
равна
![]() .
Величина
.
Величина
![]()
называется средним угловым ускорением тела за промежуток времени .
Предел этого отношения при называется угловым ускорением тела в данный момент времени
![]() . (4.7)
. (4.7)
Единица измерения углового ускорения – 1/с2.
Вектором углового ускорения называется вектор, равный производной по времени от вектора угловой скорости, т.е.
![]() . (4.8)
. (4.8)
Из формулы (4.8)
следует, что вектор
![]() ,
так же как и вектор
,
так же как и вектор
![]() ,
направлен вдоль оси вращения. Величины
,
направлен вдоль оси вращения. Величины
![]() и
и
![]() представляют проекции векторов
угловой скорости
и углового ускорения
на ось вращения.
представляют проекции векторов
угловой скорости
и углового ускорения
на ось вращения.
Найдем скорости
и ускорения любой точки тела, вращающегося
вокруг неподвижной оси (рис. 4.6).
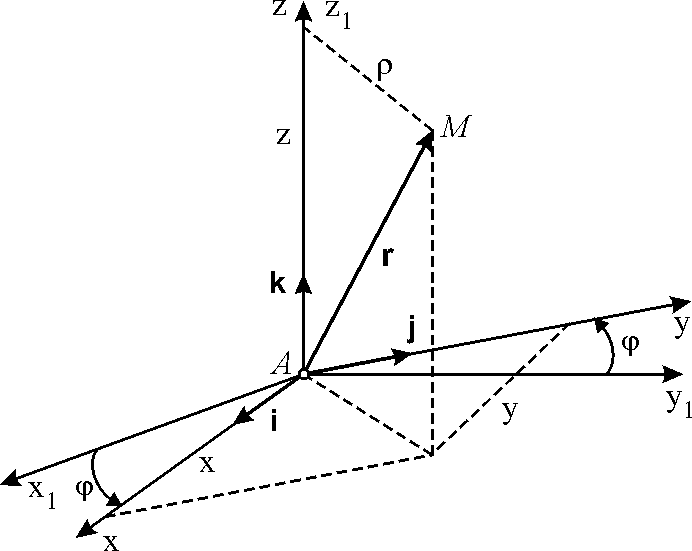
Радиус-вектор произвольной точки М в
подвижной системе координат Axyz
(![]() ,
,
![]() ,
,
![]() )
можно представить в виде
)
можно представить в виде
![]() . (4.9)
. (4.9)
Скорость точки М будет равна
Рис. 4.6. |
Поскольку
вектор k неподвижен,
то k=0. Производные
векторов i и j
вычислены ранее при рассмотрении
движения точки в полярной системе
координат. Обозначая
|
![]()
![]() .
.
Тогда формула (4.10) запишется в виде
![]() . (4.11)
. (4.11)
Так как векторное произведение
![]()
имеет те же проекции на оси х, у и z, что и вектор скорости v, то имеем
![]() , (4.12)
, (4.12)
иначе говоря, скорость любой точки твердого тела, вращающегося вокруг неподвижной оси, равна векторному произведению вектора угловой скорости тела на радиус-вектор этой точки.
Из формулы (4.12) следует, что
![]() ,
,
т.е. модуль скорости любой точки твердого тела равен произведению модуля угловой скорости тела на расстояние от точки до оси вращения. Направлен же вектор скорости по касательной к окружности, по которой перемещается точка М, в сторону ее движения.
Дифференцируя по времени равенство (4.12), получим
![]() ,
,
или ![]() .
.
Вектор
![]() направленный по касательной к траектории
точки, т.е. параллельно скорости
(рис. 4.7), называется вращательным
ускорением точки М тела, т. е.
направленный по касательной к траектории
точки, т.е. параллельно скорости
(рис. 4.7), называется вращательным
ускорением точки М тела, т. е.
![]() .
.
Численное значение вращательного ускорения равно
![]() .
.
Рис. 4.7. |
Вектор
лежащий в плоскости
окружности радиуса
Так как вектор v перпендикулярен вектору , то численное значение осестремительного ускорения равно
|
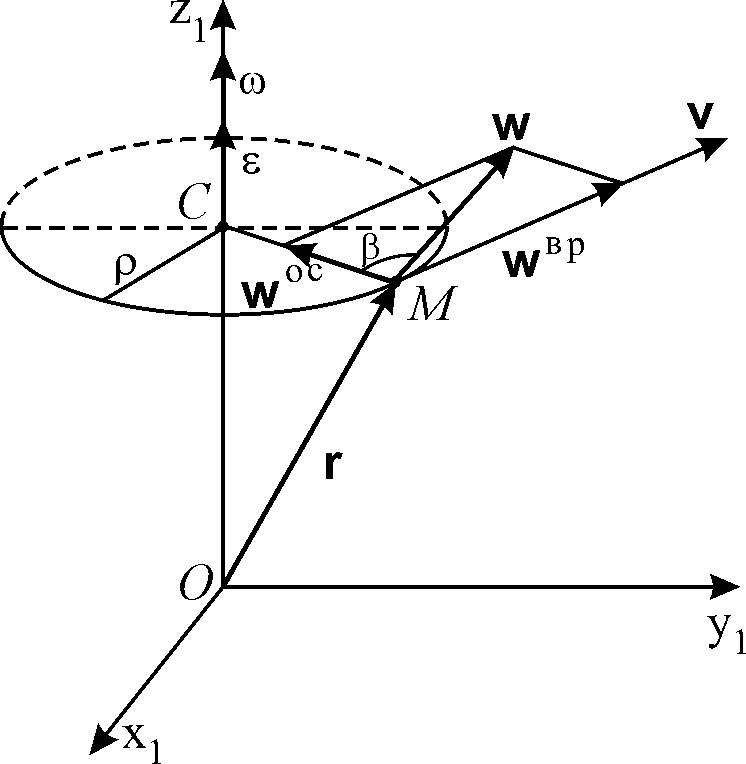
Модуль полного ускорения точки М будет
![]() .
.
Угол
![]() ,
образованный векторами полного и
осестремительного ускорений, определяется
из формулы
,
образованный векторами полного и
осестремительного ускорений, определяется
из формулы
![]() .
.