

7.3. Теорема о сложении ускорений (теорема Кориолиса)
Для нахождения абсолютного ускорения точки, т.е. ее ускорение по отношению к основной системе координат, продифференцируем формулу (7.10) по времени:
![]() . (7.13)
. (7.13)
Абсолютную
производную вектора относительной
скорости
![]() найдем по формуле (7.5):
найдем по формуле (7.5):
![]() . (7.14)
. (7.14)
В этом соотношении
![]() есть относительная производная вектора
по времени и, следовательно, представляет
собой относительное ускорение
есть относительная производная вектора
по времени и, следовательно, представляет
собой относительное ускорение
![]() ,
т.е. ускорение точки по отношению к
подвижной системе координат
,
т.е. ускорение точки по отношению к
подвижной системе координат
![]() . (7.15)
. (7.15)
Используя равенства (7.8), (7.9), (7.14) и (7.15), преобразуем формулу (7.13) к виду
![]()
![]() ,
(7.16)
,
(7.16)
где
![]() – ускорение
начала подвижной системы координат, а
– ускорение
начала подвижной системы координат, а
![]() ее угловое ускорение.
ее угловое ускорение.
Для того чтобы
найти переносное ускорение
![]() (ускорение той точки подвижной системы
координат, с которой в данный момент
совпадает движущаяся точка), закрепим
точку в подвижной системе координат,
т.е. положим
(ускорение той точки подвижной системы
координат, с которой в данный момент
совпадает движущаяся точка), закрепим
точку в подвижной системе координат,
т.е. положим
![]() ,
,
![]() .
.
В этом случае согласно формуле (7.16) будем иметь
![]() . (7.18)
. (7.18)
т.е. переносное ускорение представляет собой ускорение точки свободного твердого тела, с которым жестко связана подвижная система координат. Таким образом, имеем
![]() . (7.18)
. (7.18)
Ускорение,
определяемое членом
![]() ,
называется поворотным или
кориолисовым ускорением и
обозначается через
,
называется поворотным или
кориолисовым ускорением и
обозначается через
![]() ,
т.е.
,
т.е.
![]() . (7.19)
. (7.19)
Итак, имеем
![]() . (7.20)
. (7.20)
Эта формула выражает содержание теоремы Кориолиса: абсолютное ускорение точки равно сумме переносного, относительного и кориолисова ускорений.
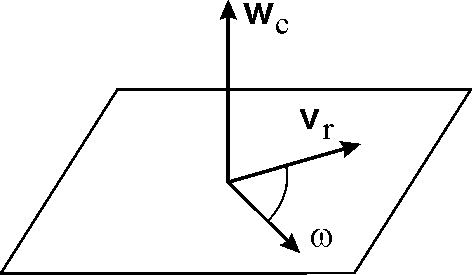
Рис. 7.2. |
При использовании формулы (7.20) полезно иметь в виду, что переносное ускорение следует определять по правилам нахождения ускорения точек твердого тела. При нахождении относительного ускорения подвижную систему координат следует |
считать неподвижной и использовать правила, изложенные в разделе 3.
Остановимся несколько подробнее на кориолисовом ускорении
.
Модуль этого ускорения, очевидно, равен
![]() . (7.21)
. (7.21)
Направление кориолисова ускорения определяется направлением векторного произведения векторов и , т.е. кориолисово ускорение будет направлено перпендикулярно плоскости, проходящей через векторы и в ту сторону, откуда кратчайший переход от к виден происходящим против хода часовой стрелки (рис. 7.2). Если векторы и не лежат в одной плоскости, удобно бывает мысленно перенести вектор параллельно самому себе в начало вектора скорости и применить указанное выше правило.
На основании формулы (7.21) можно указать, что кориолисово ускорение равно нулю в следующих случаях:
 ,
это будет при поступательном перемещении
подвижной системы координат;
,
это будет при поступательном перемещении
подвижной системы координат;угловая скорость подвижной системы параллельна относительной скорости ;
в момент времени, когда относительная скорость точки равна нулю.
8. Сложное движение твердого тела
8.1. Постановка задачи
Пусть твердое тело движется относительно подвижной системы координат О2x2y2z2, а последняя в свою очередь перемещается относительно основной системы координат О1x1y1z1, принимаемой за неподвижную. В этом случае говорят, что тело совершает сложное движение, которое состоит из двух составляющих движений.
Сложное, движение
может состоять из
![]() составляющих движений. В этом случае
имеется
систем координат и задается
движений: движение тела относительно
системы координат Оnxnynzn,
движение системы Оnxnynzn
относительно системы Оn-1xn-1yn-1zn-1
и т.д., наконец, задается движение системы
О2x2y2z2
относительно основной системы О1x1y1z1.
Движение тела или движение какой-либо
одной системы координат относительно
другой в общем случае ничем не ограничено.
Задача заключается в нахождении
зависимости между основными характеристиками
составляющих движений и сложного
движения.
составляющих движений. В этом случае
имеется
систем координат и задается
движений: движение тела относительно
системы координат Оnxnynzn,
движение системы Оnxnynzn
относительно системы Оn-1xn-1yn-1zn-1
и т.д., наконец, задается движение системы
О2x2y2z2
относительно основной системы О1x1y1z1.
Движение тела или движение какой-либо
одной системы координат относительно
другой в общем случае ничем не ограничено.
Задача заключается в нахождении
зависимости между основными характеристиками
составляющих движений и сложного
движения.
Было установлено, что движение свободного твердого тела можно представить как сложное движение, состоящее из совокупности сферического движения тела вокруг некоторого полюса и поступательного движения тела вместе с системой координат, связанной с полюсом. Таким образом, основными кинематическими характеристиками движения тела являются скорость и ускорение поступательного движения и угловые скорости и ускорения. Следовательно, задача изучения сложного движения тела, заключающаяся в нахождении зависимости между основными характеристиками составляющих движений и сложного движения, сводится к установлению связи между поступательными и угловыми скоростями и ускорениями составляющих движений. В настоящем курсе мы ограничимся лишь установлением связи между поступательными и угловыми скоростями.
Рассмотрение начнем с простейших случаев.