

Мікропроцесорна система.
Навіть самий досконалий МП даремний без підтримки інших пристроїв.
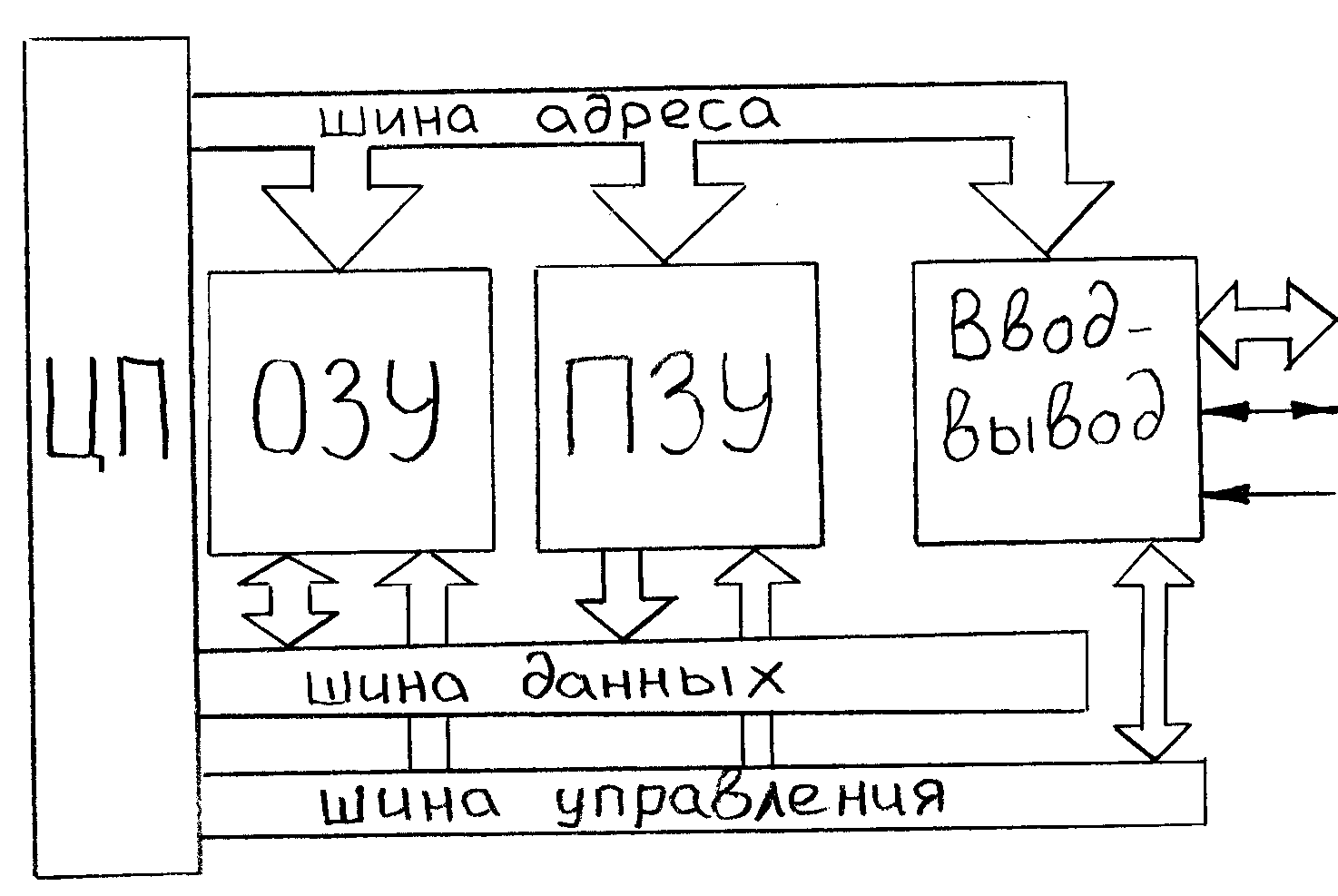
МП система має в наявність три шини, якими з'єднані всі системи ,що складають: шини адреси, даних управління. Тому однією з вимог до допоміжних мікросхем є наявність у них тристабільних виходів (для відключения від шини, коли вона не потрібна).
Кожний осередок ОЗП і ПЗП має свою унікальну (єдину) адресу, де зберігається 1 байт=8 б. Розподіл простору пам'яті в МП системах зручно показувати картою пам'яті.
FFFF ОЗУ C000 банк 3 (16к) BFFF ОЗУ 8000 банк 2 (16к) 7FFF ОЗУ 4000 банк 1 (16к) 3FFF ПЗУ 0000 (16к)
|
65535
|
В ПЗП приблизно 4Кб відводяться під операційну систему, що забезпечує введення з клавiатури, управління висновком на дісплей, кассетний нагромаджувач. 12 Кбайт займає інтерпретатор (тобто програма, що переводить мову програмування на машинну мову) Бейсіка.
|
Введення-виведення інформації.
Існує два основних способи організації введення-виведення. З одного боку, пристрої введення-виведення вважаються адресами пам'яті, а з іншого — кожному пристрою призначається адреса конкретного порта. В будь-якому випадку дані виводяться простим записом їх по відповідній адресі пам'яті або порта, а вводяться зчитуванням по аналогічній адресі. Частина простору ОЗП завжди резервується для введення-виведення, якщо В/В вважається адресою пам'яті. При організації В/В через порти виділяється набір адрес портів, що цілком не залежать від звичайного простору пам'яті.
Розрізняють паралельне і послідовне введення-виведення. При паралельному водночас передається байт даних (тобто вимагається 8-бітний регістр ), а в другому випадку дані передаються окремими бітами. Паралельний В/В реалізується досить просто:
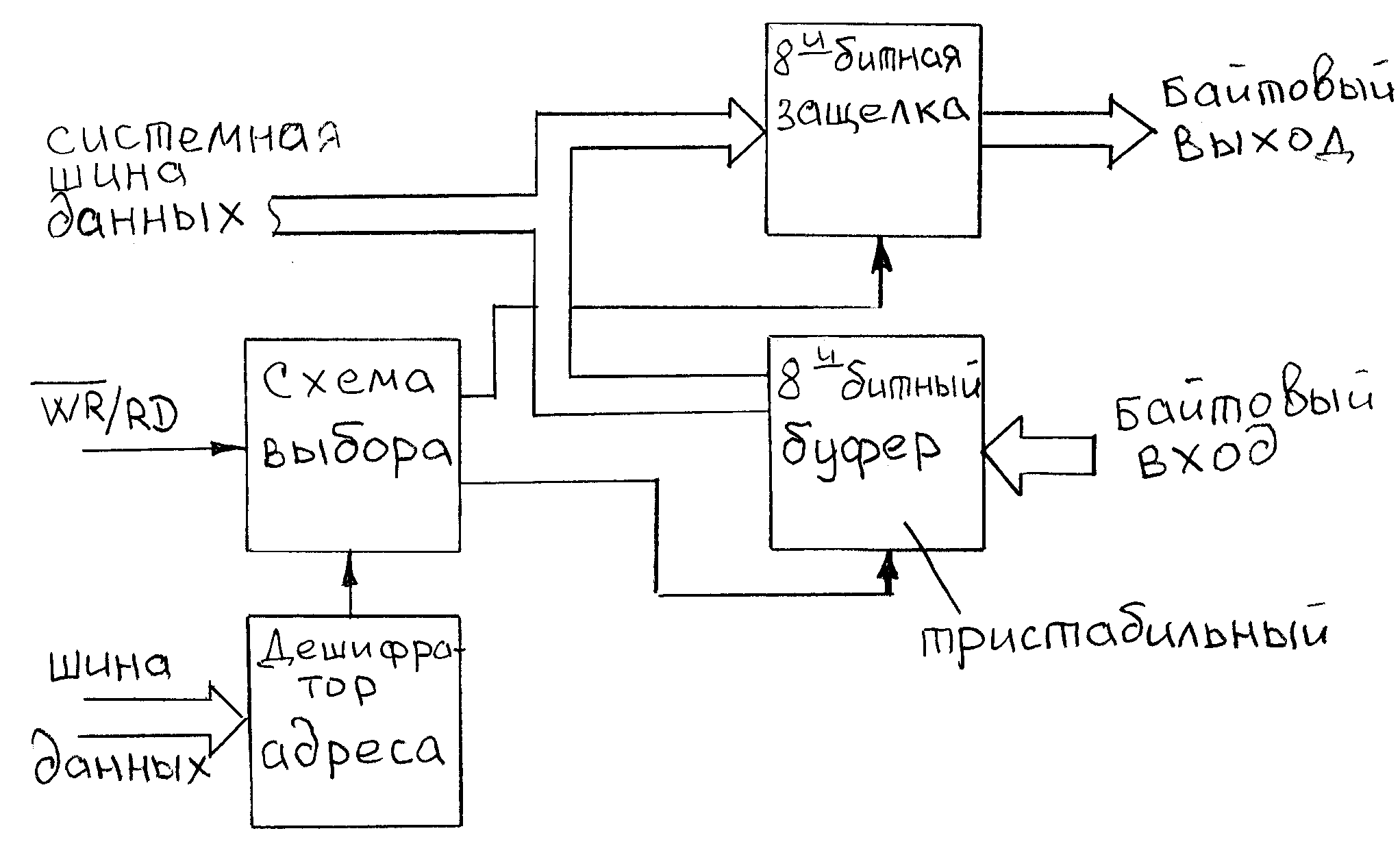
Така проста схема виявляється інколи недостатньо гнучкою і краще використати програміруємою мікросхемою паралельного введення-виведення (580ІК55).
Реалізація послідовного введення-виведення складніша, оскільки дані, звичайно, представлені на шині МП в паралельній формі (байтами).
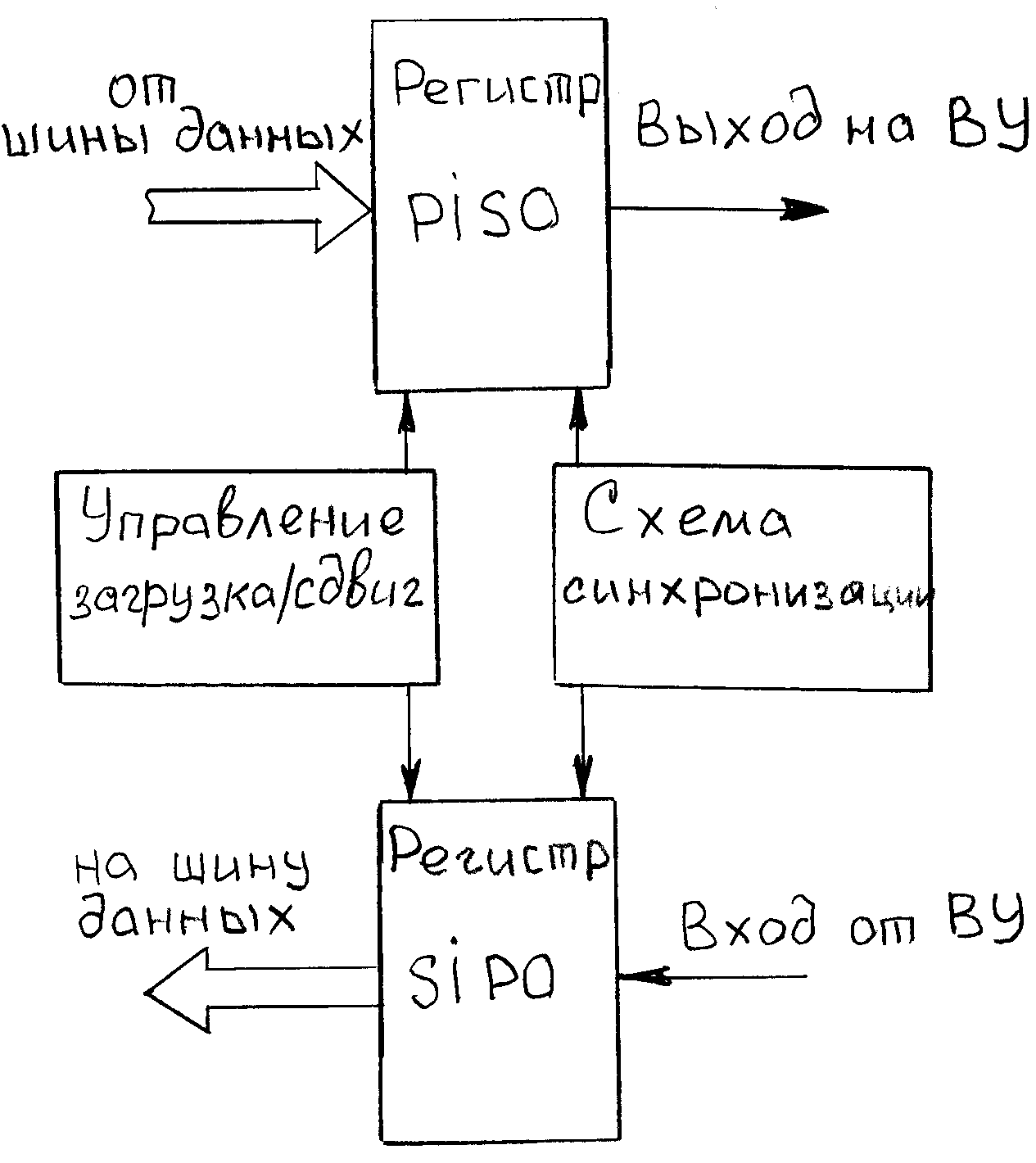
PISO — регістр зрушення з паралельним входом і послідовним виходом.
SIPO — регістр зрушення з послідовним входом і паралельним виходом.
Засоби керування введенням-виведенням.
Існують три основних способи управління операціями введення-виведення.
1. Найбільш простий і очевидний полягає в тому, щоб розв'язати ЦП управляти всіма операціями введення-виведення. Цей спосіб називається програмне введення-виведення (або В/В з опитуванням). Він забезпечує ЦП повне керування ситуацією, але виявляється найменш гнучким і досить повільним, т. я. ЦП періодично опитує кожний периферійний ; не вимагає чи воно обслуговування.
Якщо запитання є, ЦП виконує необхідне обслуговування. При цьому всі запитання інших ВП ігноруються, вони очікують доки ЦП не звільниться.
Більш зручний, але і більш складний спосіб полягає в тому, щоб дозволити периферійним пристроям переривати звичайну роботу ЦП. Це спосіб прериваннь. За наявності сигналу преривания і з урахуванням стану свого флажка преривания ЦП повинен призупинити поточну програму (зберігши в стьокє всі важливі параметри і адреса повернення) і після цього виконати необхідне обслуговування.
Всі преривания можна схемно упорядкувати по пріоритетам так, щоб самий важливий периферійний пристрій обслуговувався в першу чергу (наприклад, МП в автомобілі. Миттєва реакція МП на відмову гальм, щоб він не виконував).
3. Третій, самий складний спосіб управління введенням-виведенням, забезпечує зовнішнім приладам повний доступ до простору пам'яті системи без всякої участі ЦП в передачах даних. Такий спосіб називається прямим доступом до пам'яті (ПДП). Самий ефективний. При цьому дані можна передавати з дуже високою швидкістю (т. я. не бере участь МП). ПДП використовується, наприклад для передач даних в вінчестер (нагромаджувач на твердому диску) або з нього. В простих керуючих системах, як правило, не використовується.