

Основні поняття тмм: машина, механізм, прилад, аппарат, знаряддя праці, механічний пристрій, деталь, ланка, кінематичний елемент ланки, кінематична пара.
МАШИНА – пристрій, який виконує механічний рух для перетворення енергії, матеріалів та інформації з метою заміни або полегшення фізичної чи розумової праці людини.
МЕХАНІЗМ – це система тіл, що призначена для перетворювання руху одного або кількох тіл у потрібні рухи інших тіл.
Наприклад: шарнірно-важільний механізм у двигуні внутрішнього згоряння перетворює поступальний рух поршня в обертальний рух колінчастого валу.
ПРИЛАД- пристрій для реєстрації, вимірювання, контролю та регулювання фіз.-хім процесів. АПАРАТ- пристрій в якому протікають фіз.-хім процеси, пов’язані зі зміною стану ,властивостей, якостей інших тіл, без чітко вираженого циклічного руху самого пристрою, або його частини. ЗНАРЯ́ДДЯ ПРА́ЦІ- пристрій, що концентрує зусилля людини. МЕХАНІЧНИЙ ПРИСТРІЙ- обладнення, що служить для фіксації положення тіла, або зміни його форми, без циклічного руху частин цього обладнання. ДЕТАЛЬ МАШИНИ – це виріб, який виготовлено з одного матеріалу без складальних операцій. Наприклад: вал, зубчасте колесо, кришка. ЛАНКА МЕХАНІЗМУ – це деталь або сукупність деталей, які жорстко з'єднані між собою та входять в механізм як єдине ціле. ЕЛЕМЕНТ КП – сукупність поверхонь, ліній, точок, які належать ланкам, і які стикаються при їх відносному русі. КІНЕМАТИЧНА ПАРА (КП) – це рухоме з'єднання двох ланок, які стикаються, що обмежує їх відносний рух.
Класифікація кінематичних пар.
За числом умов зв'язку КП діляться на 5 класів (за класифікацією І.І.Артоболевського).
Номер класу відповідає числу умов зв'язку - тобто обмежень, що накладаються на відносний рух ланок (це за І.І.Артоболевським).
Як
відомо з курсу теоретичної механіки,
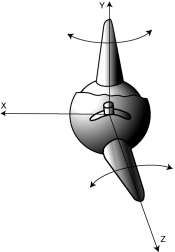
вільне абсолютно тверде тіло, що рухається
в просторі, має шість ступенів вільності
(![]() ).
).
Входження
ланок у кінематичну пару накладає на
їх відносний рух певні умови зв'язку.
Число таких умов зв'язку:
![]()
|
де – число степенів вільності ланки, що входить у кінематичну пару.
Іноді застосовується класифікація за В.В.Добровольським – за числом степенів вільності .
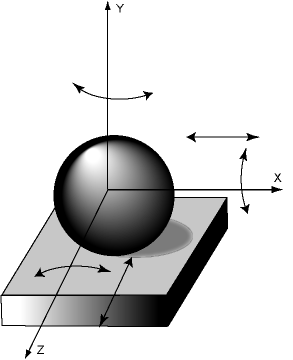
1.КУЛЯ – ПЛОЩИНА
2
3. ПЛОЩИННА
4. СФЕРИ
|
|

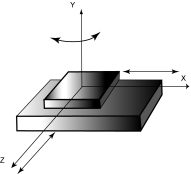 ЦИЛІНДР – ПЛОЩИНА
ЦИЛІНДР – ПЛОЩИНА
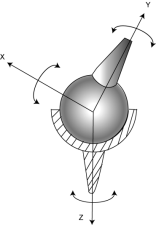


5 СФЕРИЧНА З ПАЛЬЦЕМ
|
6. ЦИЛІНДРИЧН
|
|
|
7.
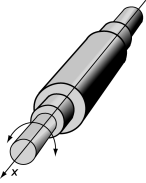
ОБЕРТАЛЬНА
|
8 |
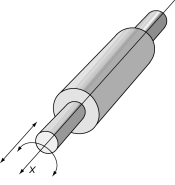
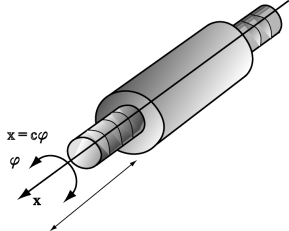
9. ГВИНТОВА
|
|

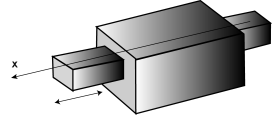 .
ПОСТУПАЛЬНА
.
ПОСТУПАЛЬНА

Кінематичні пари, у яких ланки стикаються між собою поверхнями або площинами, називаються нижчими.
Кінематичні пари, у яких ланки стикаються між собою по лінії або в точці, називаються вищими.