

13.Типовые связи между звеньями- последовательное,параллельное,встречно-параллельное соединение звеньев.
Практически любую сложную динамическую систему можно представить в виде соединения элементарных звеньев.Бывают:параллельн,последов.,встречно-параллельное,соединение с единичн. обратн. связью, комбинированное
Последовательная связь.

Y1(s)=W1(s)X(s) X2(s) = Y1(s)
Y2(s)=W2(s)X2(s)= W1(s)W2(s) X(s)
…
Yn(s)= W1(s)W2(s)…Wn(s) X(s)
Wc(s) = Yn(s)/X(s) = Yn(s)/Xn(s) = W1(s)W2(s)…Wn(s)
Для последовательного соединения передаточные функции перемножаются.
hc(t) = h1(t) + h2(t) + … + hn(t)
Если КЧХ звеньев заданы их годографами, КЧХ последовательно связанных звеньев м.б. построена по правилу перемножения векторов: модули перемножаются, а аргументоы (фазовые углы) складываются.
П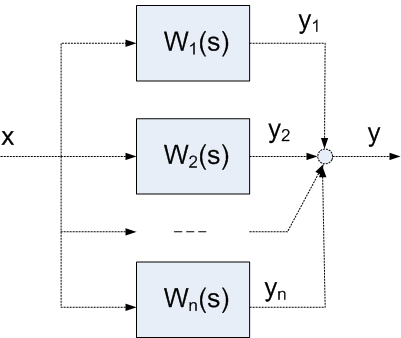 араллельная
связь.
араллельная
связь.
Y(s) = Y1(s) + Y2(s) + … + Yn(s)
Y(s) = W1(s)X(s)+W2(s)X(s)+… +Wn(s)X(s)
Wc(s) = [Y1(s) + Y2(s) + … + Yn(s)]/X(s), W(s) = W1(s)+W2(s)+ … Wn(s).
hc(t) = h1(t) + h2(t) + … + hn(t)
Для годографов – сложение векторов по правилу параллелограмма.
Для параллельного соединения передаточные функции складываются.
Параллельное и последовательное соединение звеньев относятся к простейшим соединениям, в которых сохраняются свойства детектируемости. В них влияние каждого звена распространяется только на последующие звенья. Такие схемы могут быть исследованы поочередно по одному звену.
Встречно-параллельное соединение. При наличии обратной связи одно из звеньев системы передаёт сигнал с выхода второго звена обратно на его вход, где он либо суммируется, либо вычитаетя из него. Канал, по которому сигнал с выхода системы внось подаётся на её вход называется обратной связью, причём в первом случае обратная связь считается положительной, а во втором – отрицательной. Т.о., изображение выходной величины системы связано с изображением входного воздействия уравнением: Y(s) = W1(s)*[X(s) ± W2(s)Y(s)], откуда следует: Y(s) = Ф(s)X(s), где Ф(s) – перед. Фун-ия – системы с обратнной связью, кот. Связана с перед. Ф-иями звеньев соотношением:
 .
Знак
минус – для системы с положительной
обр связью, знак плюс – для системы с
отриц обр связью.
.
Знак
минус – для системы с положительной
обр связью, знак плюс – для системы с
отриц обр связью.
В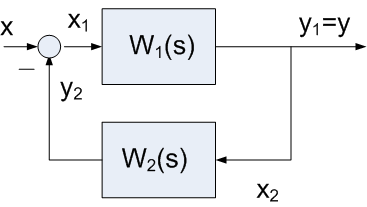 ывод
для встр-пар.:
ывод
для встр-пар.:
x1 = x – y2
y1 = y = x2
Y2(s) = W2(s)X2(s) = W2(s)Y(s)
X(s) = Y(s)/W1(s)
Y(s)/W1(s) = X(s) – W2(s)Y(s)
Y(s)[1+W1(s)W2(s)] = X(s)W1(s)
Построение КЧХ такой звмкнутой сестемы может быть выполнено графоаналитически.
Литература: Сабанин с 144-148, Ротач
15.Типовые линейные алгоритмы управления - п,и,пи,пид(стр.146 Сабанин)
Алгоритм регулирования иначе называют законом регулирования.В практике автоматизации производственных процессов применяются в большинстве случаев регуляторы с линейными унифицированными алгоритмами.
В уравнениях регулирования: μ(t) – регулирующее воздействие, ε(t) – сигнал рассогласования kп, kи = kп/Ти, kд = kпTд – коэфф-т передачи, пост интегрирования и постоянная дифференцирования (пар-ры настройки регуляторов)
П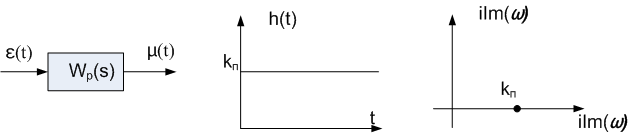 -алгоритм.Перемещение
регулирующего органа осуществляется
пропорционально отклонению регулируемой
величины от заданного значения
-алгоритм.Перемещение
регулирующего органа осуществляется
пропорционально отклонению регулируемой
величины от заданного значения




Пропорциональные регуляторы устойчиво работают со всеми О.У. Однако при различных нагрузках(возмущениях)регулируемая величина уддерживаетсяна разных значениях,т.к. перемещение регулирующего органа в новое положение соотв. новой нагрузке,и это может быть только за счет отклонения регулируемой величине.-это явление- остаточная неравномерность
Д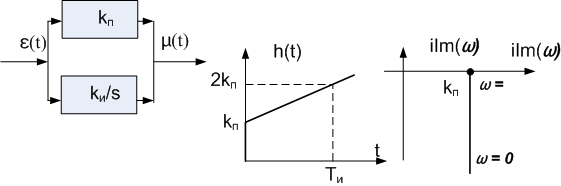 ля
получения П-регулятора применяют схемы
усилителей с жесткой отриц.обрат.связью
в виде П-звена с коэф. передачи
Wо.с.(s)=1/kp.
Усилитель должен быть малоинерционными
иметь большой коэф. усиления.
ля
получения П-регулятора применяют схемы
усилителей с жесткой отриц.обрат.связью
в виде П-звена с коэф. передачи
Wо.с.(s)=1/kp.
Усилитель должен быть малоинерционными
иметь большой коэф. усиления.
ПИ-алгоритм

 где
kи=
где
kи=
Постоянная
времени Ти имеет размерность времени,ее
величина хар-ет степень ввода в закон
регулирования интеграла и получила
название постоянной интегрирования
регулятора.Иногда её называют временем
удвоения, т.к.при
В динамическом отношении ПИ-регулятор состоит из двух параллельно включ. регуляторов: П и И. При Ти->0 он превращается в И регулятор.
"+" простая конструкция, позволяющая устойчиво и без остаточной неравномерности регулировать работу промышленных объектов.
Для получения ПИ-регулятора применяют схемы усилителей с регулируемой отрицательной инерционной обратной связью (А-звеном) и ИМ постоянной скорости.
П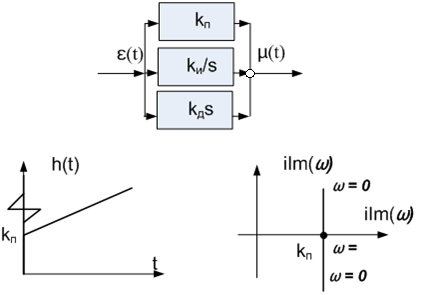 ИД-алгоритмПеремещение
регулир.органа происходит
пропорц.отклонению,интегралу оклонения
и скорости измен. регулир-ой величины.
ИД-алгоритмПеремещение
регулир.органа происходит
пропорц.отклонению,интегралу оклонения
и скорости измен. регулир-ой величины.


 ,
,
На практике ПИД-регуляторы выполняются по схемам параллельн. соед П,И,ИД звеньев с обр.связью,или к ПИ-регулятору присоединяют специальное корректирующее устройство.
Из-за дифференциальной составляющей ПИД-регуляторы обладают повыш. чувствительностью.Они обеспечивают качетсвенное регулир. процессов и особое внимание к себе.
И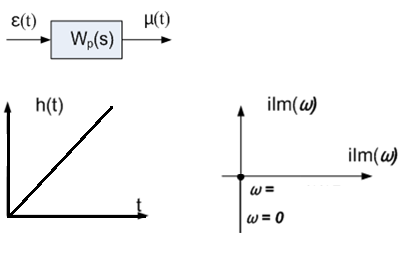 -алгоритм
Перемещение
регулирующего органа происходит
пропорционально интегралу отклонения
регулируемой величины.
-алгоритм
Перемещение
регулирующего органа происходит
пропорционально интегралу отклонения
регулируемой величины.




Коэффициент
 является настроечным параметром,численно
равным скорости перемещения регулирующего
органа при отклонении её величины на
единицу ее измерения,и назыв. приведенной
скоростью регулирования.
является настроечным параметром,численно
равным скорости перемещения регулирующего
органа при отклонении её величины на
единицу ее измерения,и назыв. приведенной
скоростью регулирования.
Из
динамических свойств следует ,что
И-регулятор явл. инерционным.Скорость
изменения его регулирующ-его воздействия
 пропорционально
пропорционально
 (t).
(t).
"+" регулир. воздейств будет изменяться до тех пор ,пока пока отклонение рег-ой величины от заданного значения (t) не достигнет нуля.
И-регуляторы устойчиво работают с объектами,обладающими самовыравниванием.
Литература: Ротач с 80-84, Сабанин с78-81