

40.Особые свойства частотных характеристик линейных сау. Теорема 1
|

Если система устойчива, т.е. нет корней справа, то интеграл по замкнутому контуру равен 0.


Если
 ,
то
,
то

Следовательно, при данных условиях :
 =
=


 =0,
т.к. нечетная ф в интервале относительно
0.
=0,
т.к. нечетная ф в интервале относительно
0.
Теорема 1.
Интеграл
от 0 до

 одноконтурной замкнутой системы при
условии, что
одноконтурной замкнутой системы при
условии, что
 ,
то равен 0.
,
то равен 0.
42. Параметрическая оптимизация сау для реальных низкочастотных возмущающих воздействий. Одноконтурные аср. Комбинированные аср (197 Ротач, 133 135 141 Сабанин)
1.Схема определения приведенного к выходу возмущения

Критерий качества управления системы
DΣ→ min
Дисперсии DΣзависят от |W(iw)|

В низкочастотной области

 |w→0
=
|w→0
=
 |w→0
|w→0
Δw = w – w0 w0 = 0 Δw = w
В АСР с ПИД-алгоритмом
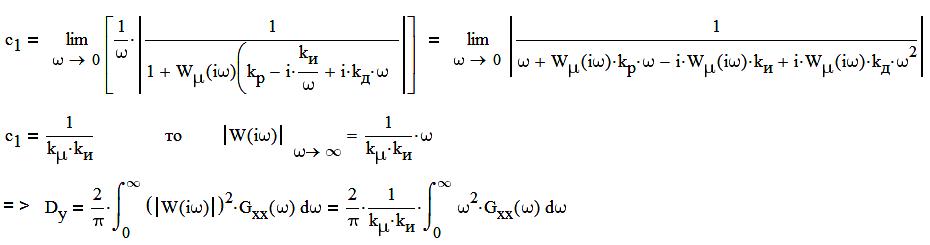
При низкочастотном возмущающем воздействии Dy обратно пропорциональна kии (kи)max→ (Dy)min
При любом алгоритме в широкополосном возмущении Dy>Dx
Итак:
АСР с типовыми алгоритмами регулирования может быть эффективна только в случае подавления низкочастотных возмущений и обработки низкочастотных управляющих воздействий.
Условие минимизации СКО – maxkи – совпадает с условием оптимальности по I
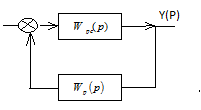
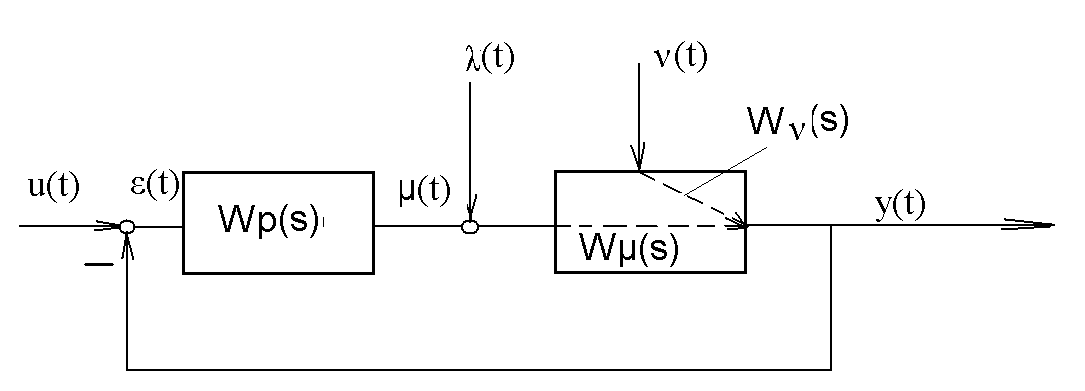
2.Одноконтурные аср
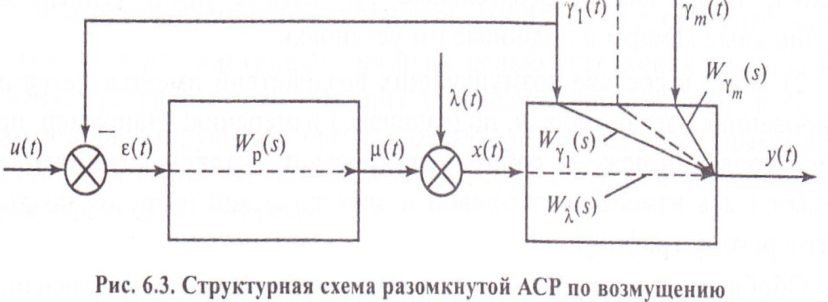
3.Комбинированные аср
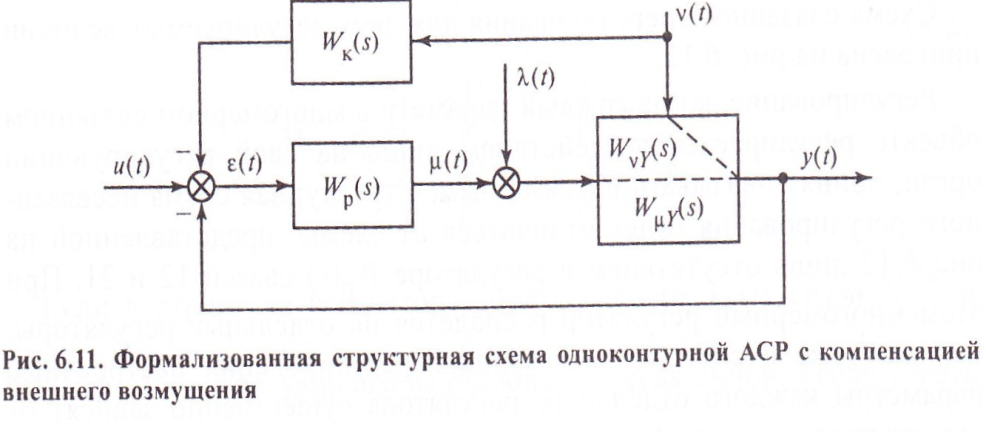
u(t) – управляющее воздействие (вырабатывается командным блоком)
ε(t) = u(t) – y(t) – сигнал рассогласования (ошибка управления)
µ(t) – регулирующее воздействие (формируется регулятором в зависимости от сигнала рассогласования)
λ(t), v(t) – возмущения
y(t) – выходная величина
43. Параметрический и структурно-параметрический синтез спс алгоритмов сар. Классификация спс. Задачи спс применительно к сау тп.
Корректирующие устройства могут включаться последовательно и параллельно элементам прямой цепи и встречно-параллельно, т. е. в виде корректирующих обратных связей.
Последовательное корректирующее устройство включают непосредственно после элемента сравнения или после каскадов предварительного усиления.
Параллельное корректирующее устройство – используется гораздо реже, но в некоторых случаях позволяет достаточно простыми способами достичь эффективного решения.
 W(p)=k/p+k0=k(τp+1)/p;
Встречно – параллельные корректирующие
устройства охватывает исполнительный
элемент и конечные каскады усилителей
мощности.
W(p)=k/p+k0=k(τp+1)/p;
Встречно – параллельные корректирующие
устройства охватывает исполнительный
элемент и конечные каскады усилителей
мощности.


Подберем таким образом, чтобы в рабочем диапазоне частот W2(jw)*Wk(jw)>>1; Wэ=1/Wk; Свойства цепи со встречно – параллельным корректирующим устройством будут определяться только свойствами самого корректирующего устройства. Рекомендуется охватывать наиболее неблагоприятные участки.
Корректирующие обратные связи делятся на жесткие и гибкие.
Жесткие образуются в безынерционном и инерционном звеньях.; W(p)=k0; W(p)=k0/(T0p+1)
Жесткие обратные связи действуют как в переходных так и в установившемся режиме, поэтому могут использоваться для коррекции точностных показателей и динамических свойств системы.
Гибкие обратные связи образуются идеальным и реальным дифференцирующим звеньями.
W(p)=k0p; W(p)=k0p/(T0p+1); Действуют только в переходных режимах, поэтому используются для коррекции динамических свойств системы.








 где kэ
= 1/k0;
Tэ
= 1/kk0.
где kэ
= 1/k0;
Tэ
= 1/kk0.
 где kэ
= k/(1
+ kT0);
Tэ
= T0/(1
+ kT0).
где kэ
= k/(1
+ kT0);
Tэ
= T0/(1
+ kT0).
 где kэ
= k/(1
+ kk0);
Tэ
= T/(1
+ kk0)
где kэ
= k/(1
+ kk0);
Tэ
= T/(1
+ kk0)
 где T1
и T2
находятся из системы уравнений
где T1
и T2
находятся из системы уравнений
TT0 = T1T2;
T + T0 + kT0 = T1 + T2,