

48.Устойчивость режимов работы нелинейных систем. Фазовые траектории и фазовые портреты.
Если корни линеаризованной системы находятся слева от мнимой оси, то реальная система устойчива, справа - неустойчива, на мнимой оси - нельзя сказать точно.
Второй метод Ляпунова: поиск специальной функции.
Свойства функций:непрерывные, с первыми производными в области начала координат, кроме самого начала координат
Достаточное условие: если нашли данные функции, то система устойчива.
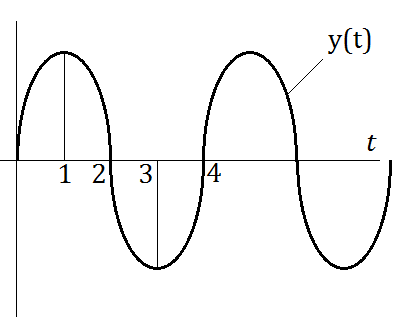
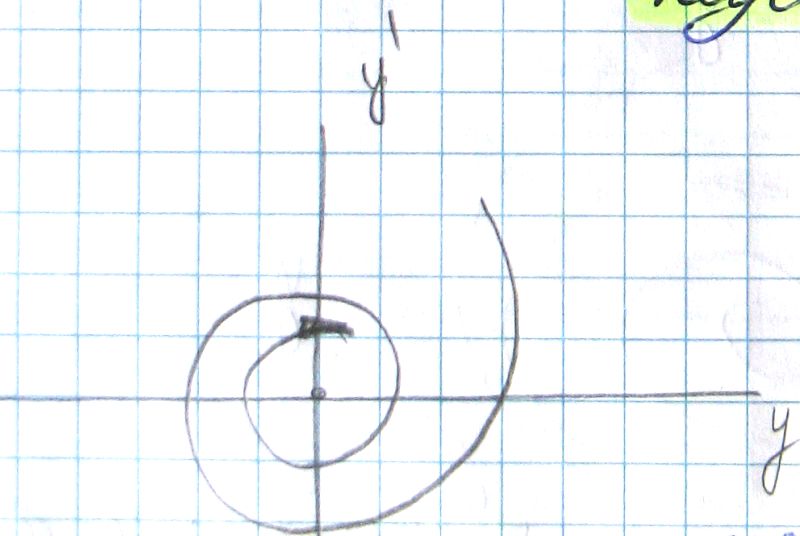
Фазовые траектории и фазовые портреты-частные случаи метода Ляпунова. Фазовая траектория – связ. координаты системы посредством движения точки в плоскости yи y’. Если на плоскости y;y’ много фазовых траекторий, то имеют место фазовые портреты
|



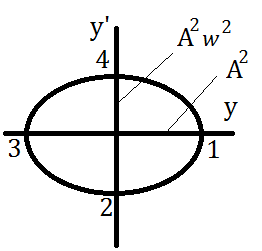
Возведем в квадрат:
 –уравнение
эллипса
–уравнение
эллипса
Фазовая траектория
Фазовая траектория
источник: лекции
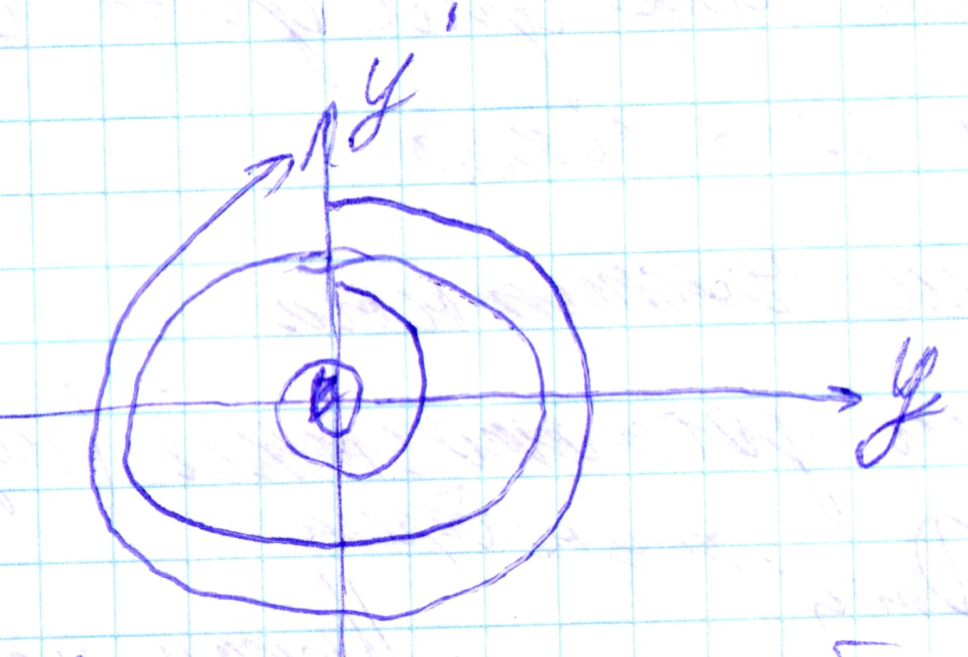
Фазовые портреты устойчивых и неустойчивых автоколебаний. Устойчивые автоколебания; неустойчивые автоколебания; устойчивость в малом, неустойчивость в большом; устойчивость вбольшом, неустойчивость в малом; Устойчивость в целом
Устойчивые автоколебания |
Неустойчивые автоколебания
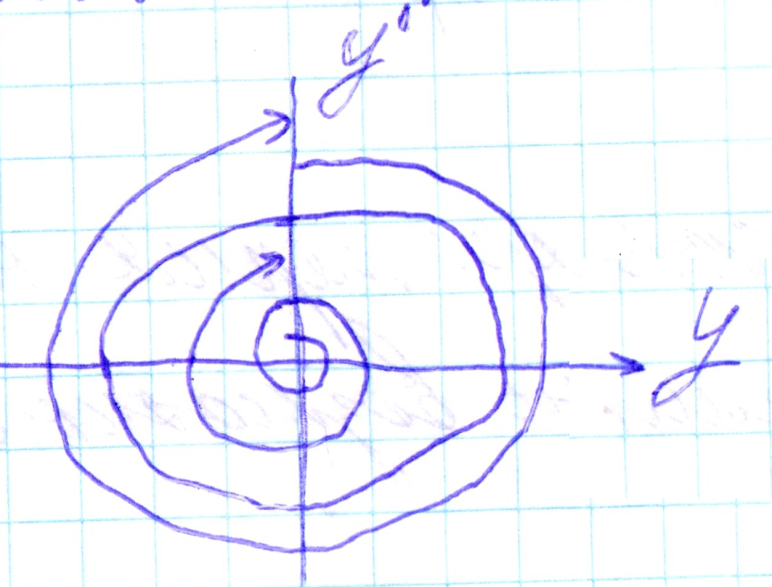
Устойчивость в малом, Устойчивость в целом
неустойчивость в большом
50. Критерий устойчивости нелинейных динамических систем в.М.Попова. (лекция, Ротач см указатель),
Критерий справедлив как для устойчивого состояния, так и для автоколебаний.
Частотный
Достаточный
Рассматриваем КЧХ, модифицировав её
|
|
Мнимая часть модифицируется на ∙ω |
Модификатор ↑ |
 )
)Определение: система абсолютно устойчива если при устойчивой линейной части через точку (-1,0) можно провести хотя бы одну прямую не пересекающую модифицированную КЧХ.

51. Метод гармонической линеаризации. (лекция)
Для анализа автоколебаний, их устойчивости, амплитуды и частоты, когда автоколебания – основной режим работы.
|
Для границы устойчивости:
Условие необходимое, но не достаточное для автоколебаний.
|
|
Нет пересечения – необходимое условие автоколебаний не выполняется. |

 для
симметричной нелинейной системы
для
симметричной нелинейной системы
|
Необходимое условие выполняется. Пересечение есть. Автоколебания устойчивые (при ↓А возникает пересечение). На уровне физических представлений можно рассматривать и достаточное условие автоколебаний |
|
При увеличении амплитуды автоколебания могут быть неустойчивыми. Это зависит от типа Н.Э. |
|
|
|
Неустойчивые |
Устойчивые |
Неоднозначно. Зависит от того где находится точка пересечения. |
52. Метод статистической линеаризации. Расчет математического ожидания и дисперсии на основе этого метода. (лекция)
Связь со случайными процессами.
П усть
усть






Оглавление
1. Основные понятия о системах управления и регулирования. Принципы регулирования по отклонению и возмущению. (Сабанин 132, Шинкина А.В.) 1
2. Классификация внешних воздействий в САУ 4
3. Цели САУ технологическими процессами 5
4. Схема формирования экономического эффекта САУ в режиме нормальной эксплуатации 6
5. Простейшие примеры технологических критериев (ТК).. 7
6. Схема САУ. Понятие функциональной схемы. Структурная схема САУ. 9
7. Понятие математической модели. Классификация моделей в системах управления. 12
8. Дифференциальные уравнения динамических систем, их составление, линеаризация и решение. 15
9. Преобразование Лапласа. Основы операционного исчисления. Понятие передаточной функции. 16
10. Временные характеристики динамических систем. Интеграл свертки и его применение при анализе динамики разомкнутых и замкнутых систем. 17
11. Преобразование и ряды Фурье. Частотные характеристики и их связь с временными характеристиками и передаточной функцией. Ротач 2004 с. 64, Сабанин с. 32 19
12. Типовые звенья САУ, их характеристики (А, П, И, Д, ИД, З, Колебательное звенья) Ротач 2004 с 72, Сабанин с 72 22
13.Типовые связи между звеньями- последовательное,параллельное,встречно-параллельное соединение звеньев. 27
15.Типовые линейные алгоритмы управления - П,И,ПИ,ПИД(стр.146 Сабанин) 28
16.Простейшие понятия устойчивости линейных систем. 32
17. Устойчивость и корни характеристического уравнения. Устойчивость линеаризованных систем. 33
18.Критерий устойчивости Гурвица и Михайлова(111 сабанин и 107 Ротач) 35
19.Критерий устойчивости Найквиста(Ротач 108) 37
21. Необходимость введения запаса устойчивости. Запас устойчивости «по модулю», «по фазе», по расположению корней характеристического уравнения. Расширенные частотные характеристики и формулировки критерия Найквиста применительно к ним. 39
22.Запас устойчивости по максимуму АЧХ замкнутой системы. М-окружности и их свойства. 40
23.Расчет АСР с П-, И- и ПИ–алгоритмами регулирования на заданный запас устойчивости по «m» и «M». 44
24. Прямые и косвенные критерии качества процессов регулирования, ориентированные на ступенчатое возмущающее действие 46
25. Оптимизация параметров настройки П ,И, ПИ-алгоритмов регулирования в области заданного запаса устойчивости 47
26. Методы построения переходных процессов в САУ 49
28. АСР с дополнительным информационным сигналом по скорости изменения параметра в промежуточной точке объекта. Структурная схема и передаточные функции данной АСР. 53
29. Расчет настроек АСР с дополнительным информационным сигналом по скорости изменения параметра в промежуточной точке объекта. 54
33. Расчет настроек комбинированной АСР 56
36.Корреляционная функция (КФ). Корреляционная функция стационарных случайных процессов. Корреляционная функция эргодических случайных процессов. 63
37. Свойства корреляционной функции стационарных случайных процессов 67
38. Понятие спектральной плотности и ее свойства (лекции + 182 Ротач) 68
39. Преобразование случайных процессов линейными динамическими системами. Мат. ожидание выхода системы. Взаимная спектральная плотность входа и выхода системы. Спектральная плотность выхода. (179, 180, 183, 185, 156 Ротач) 69
40.Особые свойства частотных характеристик линейных САУ. Теорема 1 71
42. Параметрическая оптимизация САУ для реальных низкочастотных возмущающих воздействий. Одноконтурные АСР. Комбинированные АСР (197 Ротач, 133 135 141 Сабанин) 73
43. Параметрический и структурно-параметрический синтез СПС алгоритмов САР. Классификация СПС. Задачи СПС применительно к САУ ТП. 75
44. Структурно-параметрический синтез в САУ с транспортным запаздыванием, как задача управления. 77
45. Особенности нелинейных систем (НЛС). Автоколебания. Задачи исследования НЛС. 78
46. Амплитудные и фазовые характеристики нелинейных элементов 80
47. Некоторые типовые нелинейности в САУ 81
48.Устойчивость режимов работы нелинейных систем. Фазовые траектории и фазовые портреты. 84
49. Фазовые портреты устойчивых и неустойчивых автоколебаний. Устойчивые автоколебания; неустойчивые автоколебания; устойчивость в малом, неустойчивость в большом; устойчивость вбольшом, неустойчивость в малом; Устойчивость в целом 85
50. Критерий устойчивости нелинейных динамических систем В.М.Попова. (лекция, Ротач см указатель), 87
51. Метод гармонической линеаризации. (лекция) 88
52. Метод статистической линеаризации. Расчет математического ожидания и дисперсии на основе этого метода. (лекция) 89