8. Дифференциальные уравнения динамических систем, их составление, линеаризация и решение.
ДУ являются уравнениями математической физики, которые предназначены для описания естественных физических, тепловых и химических процессов в природе технологических процессов в технике.
Общие методы решения имеют лишь линейные ДУ, поэтому в ТАУ в основном используются именно они. Вид ЛДУ:

T
– коэф. постоянной времени,
 - коэф. передачи, связывающий размерности
- коэф. передачи, связывающий размерности
 и
и
 .
.
Для применения класс. методов анализа динамических систем, представленных нелинейными ДУ мат. физики, требуется их линеаризация, выполненная по методу «малых отклонений». Т.е. линеаризуемая ф-я в окрестности точки исследуемого равновесного состояния системы представляется рядом Тейлора, причем в разложении ограничиваются только линейными членами.
В геометрической интерпретации линеаризация соответствует замене истинного графика линеаризуемой функции касательной, проведенной в точке исследуемого равновесного состояния.
Методы решения ЛДУ:
Классический метод.
Решение
 имеет вид
имеет вид
 ,
где
,
где
 – общее решение однородного ДУ,
– общее решение однородного ДУ,
 – частное решение. Общее решение имеет
вид
– частное решение. Общее решение имеет
вид
 ,
где
,
где
 - корни уравнения
- корни уравнения

2. Операционный метод.
Порядок решения:
1.Преобразовать ДУ по Лапласу;
2.Для
заданного оригинала
определить изображение входа
 ;
;
3.Записать
выражение для выходной величины
 ;
;
4.Определить оригинал .
В
общем случае
 ,
,
 .
.
 следует
представить суммой простых дробей:
следует
представить суммой простых дробей:

где,
корни
уравнения,
 коэффициенты.
коэффициенты.
Действительному
корню
 кратности
кратности
 соответствует
простых дробей
вида
соответствует
простых дробей
вида
3. Символьное и численное решение с использованием математических пакетов Mathcad, MATLAB и др.
9. Преобразование Лапласа. Основы операционного исчисления. Понятие передаточной функции.
 ,
,
где
 изображение
,
–функция
оригинал;
изображение
,
–функция
оригинал;
 s
(оператор Лапалса);
s
(оператор Лапалса);

Операционный метод.
Порядок решения:
1.Преобразовать ДУ по Лапласу;
2.Для заданного оригинала определить изображение входа ;
3.Записать выражение для выходной величины ;
4.Определить оригинал .
В общем случае ,
.
следует представить суммой простых дробей:
где, корни уравнения, коэффициенты.
Действительному корню кратности соответствует простых дробей вида
Передаточная ф-ция линейной системы W(s):
W(s)=
Передаточная функция - характеристикака, представляющ. собой преобразование Лапласа импульсной хар-ки системы; отношение преобразованных по Лапласу при нулевых н.у. выхода ко входу:
W(s)=Y(s)/X(s).
X(s) - вх.воздействие.
10. Временные характеристики динамических систем. Интеграл свертки и его применение при анализе динамики разомкнутых и замкнутых систем.
Т иповые
входные воздействия:
иповые
входные воздействия:
1. Ступенчатое воздействие

2. Импульсное воздействие – дельта импульс за беск малый промежуток времени с беск большой амплитудой (производная от ступенчатой функции).
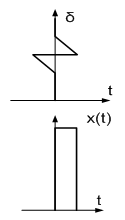
 .
.
Свойства



3. Синусоидальное воздействие.

Переходная
характеристика – реакция
системы на единичное ступенчатое
воздействие ( )
)
Импульсная
характеристика –
реакция
системы на делтьа-имп. возд. ( )
)
Связь импульсной и переходной характеристик:


Интеграл
свертки
позволяет по известной переходной
характеристике
 или импульсной характеристике
или импульсной характеристике
 рассчитать реакцию динамической системы
(переходный процесс) на заданное входное
воздействие
.
рассчитать реакцию динамической системы
(переходный процесс) на заданное входное
воздействие
.
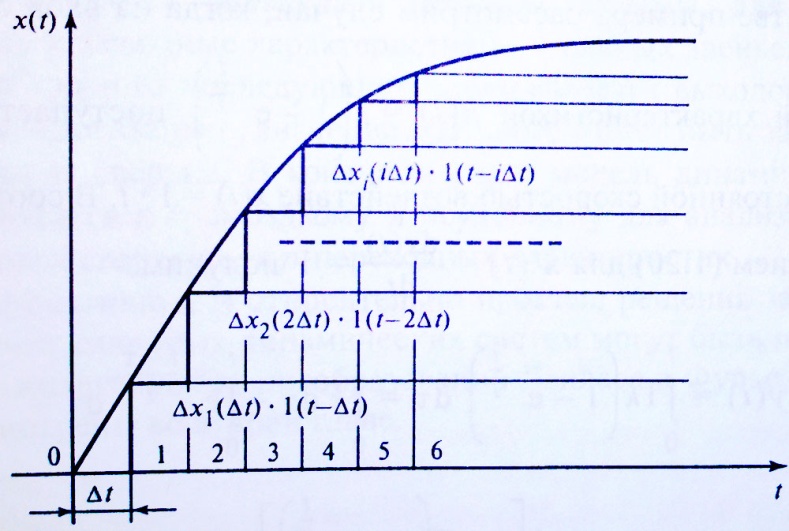
Основываясь на принципе суперпозиции и знании переходных характеристик, можно получить реакцию линейной динамической системы на произвольное
Разложение произв. воздействия на сумму ступенчатых возд. |
 ,
которое может быть заменено суммой
ступенчатых воздействий, каждое из
которых сдвинуто отн. начала координат
на величину
,
которое может быть заменено суммой
ступенчатых воздействий, каждое из
которых сдвинуто отн. начала координат
на величину




Тогда


Приближенное
разложение
и
 становится точным после предельного
перехода при
становится точным после предельного
перехода при
 .
В результате:
.
В результате: