

28. Аср с дополнительным информационным сигналом по скорости изменения параметра в промежуточной точке объекта. Структурная схема и передаточные функции данной аср.
Если одноконтурная система регулирования с ПИД недостаточно эффективна – необходимо усложнение информационной структуры системы(введение добавочных каналов связи регулятора с объектом). Число и место отбора вспомогательных регул. определяются требуемым улучшением качества управления при возможно меньшем усложнении структуры системы. В данной схеме дополнительный сигнал дифференцируется, и следовательно при окончании процесса регулирования исчезает. Применение рассматриваемой системы особенно эффективно, когда инерционность вспомогательного контура мала по сравнению с главным каналом, а основной вес имеют возмущения входящие в объект со стороны регулирующего органа
Структурная схема АСР с дополнительным сигналом по скорости изменения параметра в промежуточной точке |
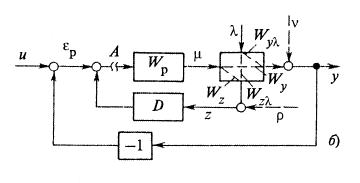
 ПИ-регулятора
ПИ-регулятора
 Дифференциатора
Дифференциатора
Остальные – передаточные функции объекта по каналам регулирующего и возмущающего воздействий на основную и вспомогательную величину, выходные значения которых указывает первый индекс, входные второй.
29. Расчет настроек аср с дополнительным информационным сигналом по скорости изменения параметра в промежуточной точке объекта.
Структурная схема АСР с дополнительным сигналом по скорости изменения параметра в промежуточной точке |
ПИ-регулятора
Дифференциатора
Передаточная функция разомкнутой системы:

Это означает, что при достаточно большом коэффициенте передачи регулятора, свойства системы перестают зависеть от свойств этого регулятора, а сама система ведет себя как одноконтурная, объект которой является виртуальным(физически не существующим) с передаточной функцией:

Порядок расчета (первый вариант):
По пер. фун. виртуального объекта определяют настройку виртуального ПИ-регул. После чего находят параметры настройки дифф. звена

При найденных значениях параметров настройки дифф по перед. фун. обобщенного объекта для регулятора

обычным
порядком определяют настройку регулятора.
Следует иметь в виду, что соответствующая
пер. фун. Обобщенного объекта КЧХ может
иметь петли. Это требует при настройке
ПИ-рег использования вспомогательной
функции

Построение АЧХ обоих контуров. Резонансные пики контуров ДОЛЖНЫ быть разнесены довольно сильно вдоль оси частот, а их высота должна быть равна одному и тому же принятому показателю колебательности
Порядок расчета(второй вариант):
Поскольку
процессы во внутреннем контуре протекают
намного быстрее, чем во внешнем, пост.
вр. дифференциатора принимается
бесконечно большой и дифференциатор
может рассматриваться как безынерционное
звено с коэф. пер.
 ,
поведение внутреннего рассматриваем
независимо от внешнего
,
поведение внутреннего рассматриваем
независимо от внешнего

Где
 – пер. фун. регулятора при единичном
его коэф. передачи,
– пер. фун. регулятора при единичном
его коэф. передачи,

Пер. фун. системы разомкнутой по главной обратной связи:

По КЧХ вспомогательного канала определяют оптим. настройку ПИ-рег, коэф. передачи которого принимается равным

Обычным порядком, задаваясь рядом значений постоянной времени дифф. по (*) при
 находят значение
находят значение
 для каждого выбранного Тд и определяют
затем их оптимальную комбинацию по
линейному интег. критерию.
для каждого выбранного Тд и определяют
затем их оптимальную комбинацию по
линейному интег. критерию.Вычисляют оптимальное значение коэф. пер. дифференциатора по формуле
