

5.4.2 Построение минимального покрывающего дерева
Итак,
пусть
дан
связный
неориентированный
граф
G
=
(V, Е)
и
весовая
функция
w:
Е![]() R.
Мы
хотим
найти
минимальное
покрывающее
дерево
(мини-
мальный
остов),
следуя жадной
стратегии.
R.
Мы
хотим
найти
минимальное
покрывающее
дерево
(мини-
мальный
остов),
следуя жадной
стратегии.
Общая
схема
всех
наших
алгоритмов
будет
такова.
Искомый
остов
строится
постепенно:
к
изначально
пустому
множеству
А
на
каждом
шаге
добавляется
одно
ребро. Множество
А
всегда
является
подмножеством
некоторого
мини-
мального
остова.
Ребро (u, v),
добавляемое
на
очередном
шаге,
выбирается
так,
чтобы
не
нарушить
этого
свойства:
![]() тоже
должно
быть
подмноже-
ством
минимального
остова.
Мы
называем такое
ребро
безопасным
ребром
(safe
edge)
для
А.
тоже
должно
быть
подмноже-
ством
минимального
остова.
Мы
называем такое
ребро
безопасным
ребром
(safe
edge)
для
А.

Листинг 5.8 – Общий алгоритм построения минимального покрывающего дерева
По определению безопасного ребра свойство «А является подмножеством некоторого минимального остова» остаётся истинным после любого числа ите- раций цикла (для пустого множества это свойство, очевидно, выполнено), так что в строке 5 алгоритм выдаёт минимальный остов. Конечно, главный вопрос состоит в том, как искать безопасное ребро в строке 3. Такое ребро существует (если А является подмножеством минимального остова, то любое ребро этого остова, не входящее в А, является безопасным).
Заметим, что множество А не может содержать циклов (поскольку является частью минимального остова). Поэтому добавляемое в строке 4 ребро соеди- няет различные компоненты графа GА = (V, A), и с каждой итерацией цикла число компонент уменьшается на 1. Вначале каждая точка представляет собой отдельную компоненту; в конце весь остов одна компонента, так что цикл повторяется |V| – 1 раз.
В оставшейся части этого раздела будет приведено правило отыскания безопас- ных рёбер. В следующем разделе будут описаны два алгоритма, использующих это правило для эффективного поиска безопасных рёбер.
Начнём с определений. Разрезом (cut) (S, V \ S) неориентированного графа G = (V, E) называется разбиение множества его вершин на два подмножества (рис. 5.7) .
Говорят,
что
ребро
(и, v)
![]() Е
пересекает
(crosses)
разрез
(S, V \ S),
если
один
из
его
концов
лежит в
S,
а
другой
– в
V \ S.
Разрез
согласован
с
множе-
ством
рёбер
А
(respects
the
set
А),
если
ни одно
ребро
из
А
не
пересекает
этот
разрез.
В
множестве
пересекающих
разрез
рёбер
выделяют ребра
наименьшего
(в
этом
множестве)
веса,
называя
их
лёгкими
(light
edges).
Е
пересекает
(crosses)
разрез
(S, V \ S),
если
один
из
его
концов
лежит в
S,
а
другой
– в
V \ S.
Разрез
согласован
с
множе-
ством
рёбер
А
(respects
the
set
А),
если
ни одно
ребро
из
А
не
пересекает
этот
разрез.
В
множестве
пересекающих
разрез
рёбер
выделяют ребра
наименьшего
(в
этом
множестве)
веса,
называя
их
лёгкими
(light
edges).
Теорема 5.8. Пусть G = (V, Е) – связный неориентированный граф, на множе- стве вершин которого определена вещественная функция w. Пусть А – мно- жество рёбер, являющееся подмножеством некоторого минимального остова графа G. Пусть (S, V \ S) – разрез графа G, согласованный с А, а (u, v) – лёгкое ребро для этого разреза. Тогда ребро (u, v) является безопасным для А.
Доказательство.
Пусть
Т
–
минимальный
остов,
содержащий
А.
Предположим,
что
Т
не
содержит ребра
(и,
v),
поскольку
в
противном
случае
доказываемое
утверждение
очевидно.
Покажем, что
существует
другой
минимальный
остов
Т ',
содержащий![]() ,так
что
ребро
(и, v)
является
безопасным
для
А.
,так
что
ребро
(и, v)
является
безопасным
для
А.

Рисунок 5.7 – Два изображения одного и того же разреза графа
На рисунке 5.7: (а) Вершины множе- ства S изображены чёрными. вершины из V \ S –белыми. Рёбра, пересекающие разрез, соединяют белые вершины с чёрными. Единственное лёгкое ребро, пересекающее разрез – ребро (d, с). Множество А состоит из серых рёбер. Разрез (S, V \ S) согласован с А (ни одно ребро из А не пересекает разрез). (б) Вершины множества S изображены слева, вершины V \ S – справа. Ребро пересекает разрез, если оно пересекает вертикальную прямую.
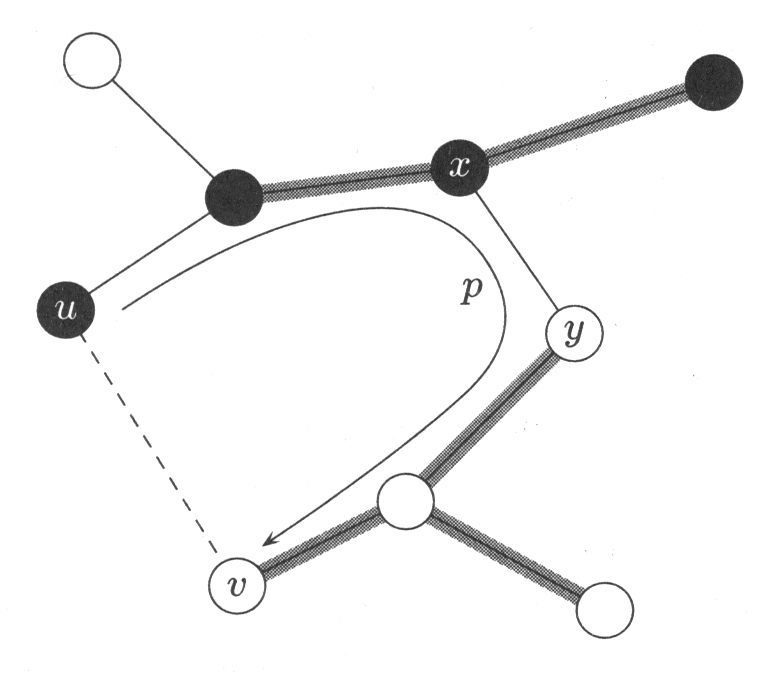
Рисунок 5.8 – К доказательству теоремы 5.8
На рисунке 5.8 все вершины S – чёрные, вершины V \ S – белые. Изображены только рёбра минимального остова (назовём его Т). Рёбра множества А выделены серым цветом; (u, v) лёгкое ребро, пересекающее разрез (S, V \ S); (х, у) – ребро единственного пути р от u к v в Т.
Остов
Т
связен
и
потому
содержит
некоторый
(единственный)
путь
р
из
и
в
v
(рис. 5.8);
ребро (и,
v)
замыкает
этот
путь
в
цикл.
Поскольку
вершины
и
и
v
принадлежат
разным
частям
разреза (S,
V \ S),
в
пути
р
есть
по
крайней
мере
одно
ребро
(х,
у),
пересекающее
разрез.
Это
ребро не
лежит
в
А,
так
как
разрез
согласован
с
А.
Добавив
к
дереву
Т
ребро
(и,
v)
и
удалив
из
получившегося
цикла
ребро
(х,
у),
получим новый
остов
Т '
=
Т \ {(х,
у)}
![]() {(u,
v)}.
{(u,
v)}.
Покажем, что Т ' минимальный остов. Поскольку (и, v) – лёгкое ребро, пересекающее разрез (S, V \ S), изъятое из Т ребро (х, у) имеет не меньший вес, чем добавленное вместо него ребро (и, v), так что вес остова мог только уменьшиться. Но остов был минимальным, значит, вес его остался прежним, и новый остов Т ' будет другим минимальным остовом (того же веса). Поэтому ребро (и, v), содержащееся в Т ', является безопасным.
Следствие 5.9. Пусть G = (V, Е) связный неориентированный граф и на мно- жестве Е определена весовая функция w. Пусть А – множество рёбер графа, являющееся подмножеством некоторого минимального остова. Рассмотрим лес GA = (V, А). Пусть дерево С – одна из связных компонент леса GA. Рассмот- рим все рёбра графа, соединящие вершины из С с вершинами не из С, и возьмём среди них ребро наименьшего веса. Тогда это ребро безопасно для А.
Доказательство. Оно очевидно: разрез (С, V \ С) согласован с А, а ребро (и,v) – лёгкое ребро для этого разреза.