

ПРОЦЕССЫ НЕФТЕГАЗОДОБЫЧИ
.pdfvk.com/club152685050 | vk.com/id446425943
Глава 2 |
87 |
Так, определение и сравнение параметров уравнения пьезопроводно- сти по кривым восстановления давления, снятым до и после обработки скважины, позволяет оценить результативность этой обработки.
Рассмотрим более подробно постановку некоторых типов обратных
задач.
Обратная коэффициентная задача
Пусть изучаемый в эксперименте процесс моделируется решением
задачи |
|
|
L [u] = g(x,θ ), |
x X Rk , |
(2.1) |
θ |
|
|
с дополнительными условиями |
|
|
lθ [u] = h(x,θ ), |
x ∂X . |
(2.2) |
Здесь x = {x1, x2 , x3,...., xk } – набор так называемых контролируемых |
||
переменных, θ Ω – совокупность некоторых параметров, |
Lθ [ ] – детер- |
|
минированный дифференциальный оператор, зависящий |
от θ , Rk – |
|
евклидово пространство размерности k, ∂X – граница множества Х.
При заданных θ задача (2.1)–(2.2) интерпретируется как обычная начально-краевая задача математической физики и является прямой зада- чей определения «следствия» (решения) u по «причинам» – набору извест- ных θ , g, h и заданных Lθ и lθ .
Если же величины θ неизвестны, то возникает следующая обратная задача: оценить исходные параметры θ и функцию отклика u = u(x,θ ) для модели (2.1)–(2.2) по экспериментальным данным, если в эксперименте наблюдаются некоторые функционалы b[u] от отклика u [1, 2].
Экспериментальные данные, предоставляющие информацию для оп-
|
|
|
|
ределенных оценок θ |
и u |
= u(x,θ ) , могут быть заданы в виде системы на- |
|
блюдений |
|
yir = u(xi ,θ ) + εir , |
|
|
|
(2.3) |
|
|
|
i = 1,2,...,n, |
|
|
|
r = 1,2,...,ri , |
|
где yir – результат r -го измерения u в точке xi , ε ir |
– ошибка этого изме- |
||
рения.
Оценки параметров θ , полученные с помощью случайных вели- чин yir , сами являются случайными величинами. Смещенность или несмещенность, а также дисперсия оценок определяется статистическими методами на основе некоторых предположений о распределении случай- ных величин ε ir и о виде функции отклика u(x,θ ) .

vk.com/club152685050 | vk.com/id446425943
88 |
Глава 2 |
Мы будем считать, что параметры θ принадлежат евклидовому про-
странству размерности m:
θ = {θ1,θ 2 ,...,θ m} Ω Rm .
Более общий случай принадлежности искомых характеристик функ- циональному пространству сводится к рассматриваемому подходящей па- раметризацией:
m
θ (x) = ∑θi fi (x) ,
i=1
где fi (x) – заданные базисные функции.
Дополнительные условия (2.2), а также правая часть (2.1) могут быть известны с ошибками и лишь в отдельных точках.
Пример. Обратная коэффициентная задача теплопроводности
Пусть u = u(x,t) является решением краевой задачи теплопроводно-
сти:
L[u] ≡ ut − a(x,t) uxx = g(x,t), 0 < x < l; 0 < t < T;
u x=0 = u0 (t); u x=l = u1(t), t ≥ 0,
u |
|
t =0 |
= u0 |
(x), x X = {0 < x < l}. |
|
||||
|
|
|
|
Функции g, u0 , u0 , u1 заданы, требуется определить коэффициент теплопроводности a(x,t) .
Представив a(x,t) в виде
m
a(x,t) = ∑θi fi (x,t) ,
i=1
сведем задачу к получению оценок {θi } по результатам измерений
yij = u(xi ,t j ,θ ) + εij .
Интерпретация косвенных измерений
Пусть объект исследования характеризуется элементами u F ; если элемент u не доступен для прямого изучения, то изучается какое-либо его косвенное проявление g(x), x X .
Элемент g(x) функционально зависит от u: |
|
A[u] = g(x) , |
(2.4) |
где A[ ] – некоторый детерминированный оператор.
vk.com/club152685050 | vk.com/id446425943
Глава 2 |
89 |
Обратная задача, связанная с интерпретацией косвенных изменений, заключается в оценке элемента u по некоторым функционалам b[g(x)] от правой части (2.4) при заданном А.
Например, могут производиться измерения в точках x1, x2 ,..., xn X :
yi = g(xi ) + ε (xi ) .
Требуется найти оценку u для модели (2.4).
Оператор А в (2.4), как правило, является вполне непрерывным, так
что он не может иметь непрерывного обратного оператора A−1 [3]. Это приводит к неустойчивости решения обратной задачи (2.4) относительно экспериментальных погрешностей: даже малые ошибки в измерении g мо- гут привести к недопустимо большим ошибкам в определении u. Поэтому
говорят, что обратная задача (2.4) некорректно поставлена [4–6].
После работ Ж. Адамара (J. Hadamar, 1923 г.) считалось, что некор- ректно поставленные задачи нецелесообразно изучать, поскольку ошибки замеров неизбежны, однако насущные потребности практики все чаще приводили к необходимости их рассмотрения.
В конце концов интуитивные методы повышения устойчивости об- ратных задач, выработанные поколениями инженеров и математиков- прикладников, оформились в хорошо разработанную теорию построения
устойчивых (регуляризующих) алгоритмов решения некорректных за- дач [4–6], элементы которой будут рассмотрены чуть ниже.
Пример. Задача определения формы электрического импульса на входе кабеля u(t) по результатам записи его на выходе кабеля формулиру- ется в виде
t |
|
∫ K(t − τ )u(τ )dτ = g(t) , |
(2.5) |
0 |
|
где K(t) – импульсная функция кабеля. |
|
В ходе эксперимента проводятся наблюдения |
|
y(t) = g(t) + ε (t) , |
(2.6) |
где g(t) – сигнал на входе кабеля, ε (t) – ненаблюдаемая ошибка измере- ния g в момент времени t.
Обратная задача определения u(t) по наблюдениям (2.6) параметри-
m
зацией u(t) = ∑θα fα (t) , где {fα (t)} – некоторая базисная система функ-
α =1
ций, может быть сведена к решению методом наименьших квадратов сис- темы линейных алгебраических уравнений
m |
|
|
∑Kβα θ α = y(tβ ) , |
(2.7) |
|
α =1
tβ
где Kβα = ∫ K(tβ − τ ) fα (τ )dτ .
0
vk.com/club152685050 | vk.com/id446425943
90 |
Глава 2 |
Следствием некорректности задачи (2.5) является плохая обуслов-
ленность системы (2.7), что на практике приводит к «разбалтыванию» ре-
шений θ при больших m. Первоначальный подход в этом случае состоял в том, чтобы варьировать величину m в зависимости от величины ошибки ε . Затем появились более тонкие методы решения такого рода задач.
2.1. Методы решения обратных коэффициентных задач
2.1.1. Регрессионный анализ
Если удается решить прямую краевую задачу (2.1–2.2) и получить явный вид функции u = u(x,θ ) , где неизвестные θ присутствуют в виде
параметров, то получение оценок θ сводится к обычной задаче регресси- онного анализа [1, 7–9]. Решение прямой задачи, как правило, нелинейно зависит от θ , так что мы приходим к задаче поиска оценок в случае нели- нейной регрессии. Примем обычные для регрессионного анализа предпо-
ложения о ненаблюдаемых ошибках:
E[εir ] = 0, E[εir εi′r′ ] = δ ii′δ rr′σ i2 ,
1, |
i = i′; |
где E[ ] – знак усреднения, δ i i′ = |
i ≠ i′. |
0, |
В качестве оценок неизвестных параметров θ используем оценки метода наименьших квадратов:
|
|
|
|
|
|
|
|
|
|
n |
p |
|
− u(x ,θ )]2 |
|
|
|
|
||
|
|
|
θ N = Arg inf Φ(θ ), |
Φ(θ ) = ∑ |
i |
[ y |
i |
, |
|
|
|
||||||||
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
θ Ω |
|
|
|
i=1σ i2 |
i |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
(2.8) |
|||||||||
|
|
|
|
y |
i |
= ∑ y |
ir |
/ r ; |
p = |
ri |
; |
N = |
∑r , |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
i |
i |
N |
|
|
|
i |
|
|
|
|
|||
|
|
|
|
|
|
r |
|
|
|
|
|
|
i |
|
|
|
|
||
где Arginf Φ(θ ) – значение θ , при котором Φ(θ ) достигает минимума. |
|
|
|
||||||||||||||||
|
|
|
Множитель |
1 |
|
в дальнейшем можно опустить, заменив u и y на |
|
1 |
u |
||||||||||
|
|
|
σ 2 |
|
|
||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
σ |
||||
и |
y . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
σ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Метод стохастической аппроксимации
Потребовав минимизации функционала Φ(θ ) в среднем, вместо (2.8) получим оценки
Arg inf ( ) , где ( ) E[ ( )].
θ = Φ θ Φ θ = Φ θ
θ Ω
vk.com/club152685050 | vk.com/id446425943
Глава 2 |
91 |
Непосредственное определение оценок θ затруднено из-за отсутст- вия информации о функции распределения случайных величин yir , поэто-
му для оценки величин θ может быть использована итерационная гради- ентная процедура
где θ Φ = ∂ Φ
∂θ1
|
|
(s+1) |
(s) |
|
|
|
θ |
= θ − ρ (s) Φ(θ (s) ) , |
(2.9) |
|
|
|
θ |
|
,..., |
∂ Φ |
|
|
|
. |
|
|
||
|
|
|
||
|
∂θ m |
|
|
|
Здесь ρ (s) – число, определяющее величину шага и выбираемое
обычно таким, чтобы удовлетворялось условие монотонности
Φ(θ (s+1) ) ≤ Φ(θ (s) ) .
Можно показать [10], что если применяется алгоритм (2.9) и
|
∞ |
|
∞ |
|
|
|
|
а) |
∑ρ (s) = ∞, |
∑ρ 2 (s) |
< ∞ ; |
|
|||
|
s=1 |
|
s=1 |
|
|
|
|
б) |
inf {(θ − θ )T Φ(θ ) }≤ 0 |
(ε > 0) , |
|
||||
|
|
|
θ |
|
|
|
|
|
ε < (θ − θ )T (θ − θ ) < 1 ; |
|
|
||||
|
|
|
|
ε |
|
|
|
в) E[ T Φ Φ] ≤ d(1 + θ Tθ ) (d > 0) , |
|
||||||
|
θ |
θ |
|
|
|
|
|
|
|
|
|
|
(s) |
|
|
|
|
|
|
|
|
s → ∞ с вероятностью, |
|
то последовательность |
θ |
|
сходится к θ при |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
равной 1 и в среднеквадратичном смысле, т. е. |
|
|||||
|
|
|
(s) |
|
|
|
|
lim |
|
− θ = 0 |
|
= 1, |
|
P |
θ |
|
|
|||
s→∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(s) |
(s) |
|
lim |
E[(θ |
− θ )T (θ |
− θ )] = 0. |
s→∞ |
|
|
|
Здесь θ T – транспорированный вектор θ .
Решение обратных задач методами теории чувствительности
При решении обратных коэффициентных задач путем итерационной минимизации невязки большое значение имеет вопрос выбора величины и направления каждого последующего «шага» в пространстве искомых па- раметров.
vk.com/club152685050 | vk.com/id446425943
92 |
Глава 2 |
Оптимизация «маршрута» поиска может быть осуществлена с помо- щью исследования чувствительности решений прямых задач относительно варьирования значений коэффициентов моделей [11, 12].
Используя аппарат теории чувствительности, коэффициенты θ мож- но искать при помощи итерационной процедуры
где смещения ∆θ (s) |
|
θ (s+1) = θ (s) + ∆θ (s) , |
|
|
(2.10) |
||||||||
определяются из условия минимизации функционала |
|||||||||||||
ψ (∆θ ) = ∑n |
pi |
[u(x |
,θ (s))+ ∆θ |
T h(x ,θ (s))− y |
]2 , |
||||||||
|
|||||||||||||
|
i=1σ i2 |
i |
|
i |
|
i |
|
||||||
|
|
|
|
|
|
|
|
|
|
T . |
|
||
|
h(x ,θ (s))= |
|
∂ u |
, |
∂ u |
, ..., |
∂ u |
|
|
||||
|
|
|
|
||||||||||
|
|
|
|
|
|
||||||||
|
i |
|
|
∂θ1 ∂θ 2 |
|
∂θ m |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||||
Матрица чувствительности |
h(x ,θ (s)) |
определяет «отклик» решения |
|||||||||||
|
|
|
|
|
|
i |
|
|
|
|
|
||
прямой задачи на малые изменения значений коэффициентов θ .
Пример.
Рассмотрим линейное дифференциальное уравнение
|
|
|
|
|
m |
d |
k |
u |
|
|
|
|
|
|
|
∑θ k |
|
+ u = θ 0 |
|||
|
|
|
|
|
k =1 |
d t k |
|
|||
с начальными условиями |
|
|
|
|
|
|
|
|
||
u(k )(0) = α k , |
|
|
|
k = 0,1, ..., m − 1. |
||||||
Необходимо оценить параметры θ j ( j = 0,1, ..., m) по замерам |
||||||||||
|
yi = u(ti ) + ε i , |
i = 1, 2, ..., n . |
||||||||
Легко увидеть, что функции чувствительности |
||||||||||
|
|
|
|
|
h j (t,θ ) = |
∂ u(t,θ ) |
||||
|
|
|
|
|
|
|
|
|
|
∂θ j |
могут быть найдены из решения задачи |
||||||||||
m |
d |
k |
h0 |
|
|
|
|
|
|
|
∑θ |
|
|
+ h = 1, |
|
|
|||||
d tk |
|
|
||||||||
k =1 k |
|
|
0 |
|
|
|
|
|||
m |
d k h j |
|
|
d ju |
|
|
|
|
||
∑θ k |
|
|
|
|
+ |
|
+ h j = 0, j = 1,2,K,m, |
|||
d tk |
|
d t j |
||||||||
k =1 |
|
|
|
|
|
|
||||
hl (0) = 0, |
|
l = 0,1,K,m. |
||||||||
Оценки коэффициентов θ определяются по алгоритму (2.10), где ве- |
||||||||||
личины ∆θ (s) находятся путем решения уравнений |
||||||||||
m |
|
|
|
|
|
|
|
|
|
|
∑A(jls)∆θl(s) = B(js) , |
j = 0, 1, …, m, |
|||||||||
l =0 |
|
|
|
|
|
|
|
|
|
|
vk.com/club152685050 | vk.com/id446425943
Глава 2 |
93 |
где
A(jls) = ∑h h j (ti ,θ (s) )hl (ti ,θ (s) ), i=1
B(js) = ∑h [yi − u (ti ,θ (s) )] hl (ti ,θ (s) ). i=1
2.1.2. Оценивание параметров с помощью замены дифференциального уравнения конечно-разностным
Мы предполагали до сих пор, что прямая начально-краевая зада- ча (2.1)–(2.2) может быть решена точно. Однако это возможно далеко не всегда. В тех случаях когда точное решение задачи (2.1)–(2.2) не удается
получить, для определения параметров может быть произведена замена
операторов Lθ |
и lθ их конечно-разностными аналогами. |
|
||||||||||||||||
Рассмотрим, например, задачу оценки коэффициента температуро- |
||||||||||||||||||
проводности а для уравнения теплопроводности: |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
∂ u(x,t) |
= a |
∂ 2u(x, t) |
|
|
|||||
|
|
|
|
|
|
|
|
|
∂ t |
|
|
∂ x2 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
(0 ≤ x ≤ l, |
t ≥ 0). |
|
|
||||||
Переходя к дискретной координате с шагом ∆x |
и к дискретному |
|||||||||||||||||
времени с шагом ∆t , получим уравнение [13] |
|
|
|
|||||||||||||||
|
|
|
|
|
uk,s − uk,s −1 = θ (uk +1,s − 2uk,s + uk −1,s ), |
(2.11) |
||||||||||||
~ |
|
∆t |
|
|
~ |
|
|
≤ ξ , ξ – методическая ошибка замены дифференци- |
||||||||||
|
|
|
|
|||||||||||||||
где θ = a |
|
, |
a − a |
|
|
|||||||||||||
(∆x)2 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ального уравнения конечно-разностным. |
|
|
|
|
||||||||||||||
Требуется оценить θ по системе наблюдений yk,s = uk,s + ε k,s , где |
||||||||||||||||||
uk,s = u(xk ,ts ), |
xk = k ∆x |
|
= 0,1,..., |
l |
|
|
||||||||||||
k |
|
, |
|
|||||||||||||||
|
|
|||||||||||||||||
ts = s ∆t |
|
(s = 0,1,...) , |
|
|
|
|
∆x |
|
||||||||||
|
|
|
|
|
|
|
|
|
||||||||||
E[ε k,s ] = 0, т. е. E[ yk,s ] = uk,s , |
|
|
|
|
|
|
||||||||||||
E[ε |
k,s |
ε |
k ′,s′ |
] = δ |
δ σ 2 . |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
kk ′ ss′ |
|
|
|
|
|
|
|
|
||||
Для решения задачи перепишем (2.11) в виде |
|
|||||||||||||||||
|
|
|
|
uk,s = uk,s −1 + θ (uk +1,s − 2uk,s + uk −1,s ) . |
(2.12) |
|||||||||||||
Заменим теперь в правой части (2.12) все u на результаты их наблю- |
||||||||||||||||||
дений. Получим в итоге некоторую оценку для uk,s : |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
− 2 yk,s + yk −1,s ) . |
|
||||||
|
|
|
|
|
u k,s = yk,s−1 + θ ( yk +1,s |
|
||||||||||||
vk.com/club152685050 | vk.com/id446425943
94 |
|
Глава 2 |
|
|
|
В качестве |
оценки параметра θ |
|
можно |
принять величину |
|
θ = Arginf F (θ ), |
|
|
|
|
|
F (θ ) = E ∑ |
(uk,s − yk,s )2 |
, и использовать для ее оп- |
|||
|
|
|
|
|
|
|
k,s |
|
|
|
|
ределения метод стохастической аппроксимации (2.1.1). |
|||||
Рассмотрим случай, когда разности |
yk − yk ±1 |
измеряются в малом |
|||
числе точек xk . В этих условиях необходимая точность оценок обеспечи- вается достаточно большим числом измерений по времени (s → ∞) .
Исходя из (2.9), получим следующий алгоритм определения оце-
нок θ (s) в момент s∆t :
|
(s) |
(s−1) |
− ρ (s){ θ F (s) (θ ) }θ =θ (s−1) , |
||||||
|
θ = θ |
||||||||
где |
F (s) (θ ) = |
|
1 |
|
− y |
|
)2 |
|
+ f (s) , f (s) – добавка, обеспечи- |
|
|
∑(uk,s |
|
|
|||||
θ |
θ |
|
2 |
k |
|
k,s |
|
|
|
вающая несмещенность оценок θ (s) .
Так, если конечные разности измеряются в одной точке, можно по-
ложить [13] |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
F (s) (θ ) = |
|
|
|
|
|
+ 2σ 2 (1+ 3θ ). |
|||
2 |
|
uk,s − y |
|
|
|
|
||||
θ |
|
θ |
|
|
k,s |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Легко проверить, что |
|
|
|
|
|
|
|
|
||
E[{ θ F (s) (θ )}θ =θ (s−1) ] = 0 |
при |
θ (s−1) = θ n , |
||||||||
так что добавка 2σ 2 (1 + 3θ ) действительно обеспечивает несмещенность оценки θ .
2.1.3. Некорректность операции дифференцирования экспериментальных функций
В предыдущем разделе были рассмотрены алгоритмы решения об- ратных задач, основанные на конечно-разностной аппроксимации диффе- ренциальных уравнений. Этот подход следует применять с большой осто- рожностью, поскольку конечно-разностная аппроксимация эквивалентна непосредственному дифференцированию экспериментальных функций, чреватому большими погрешностями [4–6].
Проиллюстрируем это обстоятельство следующим простым приме-
ром.
Пусть дано уравнение
du |
+ θ (u − 1) = 0 . |
(2.13) |
dt |
|
|

vk.com/club152685050 | vk.com/id446425943
|
Глава 2 |
|
|
95 |
|||
Требуется определить параметр θ по замерам |
yi |
= u(ti ) + ε i , произ- |
|||||
веденным в дискретные моменты времени |
ti = i∆t |
(i = 1,2,...,l) . Заменяя |
|||||
производную конечно-разностной аппроксимацией |
du |
≈ |
yi +1 − yi |
, полу- |
|||
dt |
|
||||||
чим из (2.13) |
|
|
|
|
∆t |
||
|
|
|
|
|
|
|
|
(i+1) |
|
yi+1 − yi |
|
|
|
|
|
θ |
= |
|
, |
|
(2.14) |
||
(1− yi )∆t |
|
||||||
(i+1)
где θ – оценка параметра θ , полученная после (i+1)-го замера.
Легко показать, что предложенный алгоритм неустойчив. Действи- тельно, по формуле Тейлора, имеем
u(ti +1 ) = u(ti )+ u′(ti )∆t + u′′(ti ) |
(∆t)2 |
|
+ o(∆t)2 , |
|
|||||||||||||||
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yi +1 − yi |
− u′(ti |
) ≈ |
εi +1 − εi |
|
+ u′′(ti ) |
∆ t . |
|
|||||||||||
|
|
|
|||||||||||||||||
|
∆ t |
|
|
|
|
|
|
|
∆ t |
|
|
|
|
|
|
|
2 |
|
|
Для относительной погрешности определения производной u′(ti ) по- |
|||||||||||||||||||
лучим выражение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
δ u′ |
= |
θ δ u′ |
≤ |
|
θ |
|
|
2ε |
+ |
|
u′′ |
|
∆ t |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
(2.15) |
||||
|
|
|
|
|
|
|
|
|
|
||||||||||
|
u′ |
|
|
|
|
|
|
|
|
∆ t |
|
|
|
|
2 |
|
|
|
|
|
|
1 − u 1 − u |
|
|
|
|
|
|
|
||||||||||
где ε – абсолютная ошибка величины u. |
|
|
|
|
|
|
|
|
|
|
|||||||||
Так как в первом слагаемом правой части (2.15) величина ∆t |
стоит в |
||||||||||||||||||
знаменателе, то ясно, что при малых ∆t дифференцирование эксперимен- тальных функций является неустойчивой операцией: малые погрешно- сти ε приводят к большим ошибкам в определении u′ .
Процедуру вычисления u′ можно регуляризовать, увеличивая про- межуток времени между замерами ∆t . Однако при этом увеличивается ошибка, допускаемая при конечно-разностной аппроксимации производ-
ной. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Минимальная ошибка, согласно (2.15), достигается при |
2ε |
= |
|
u′′ |
|
|
∆t |
|
||||||||||
|
|
|
||||||||||||||||
|
|
|||||||||||||||||
|
|
|
|
δ u′ ≈ |
θ |
|
|
∆t |
|
|
|
2 |
|
|||||
|
|
|
|
|
|
|
|
|
||||||||||
или ∆t = 2 |
ε |
. При таком значении ∆t |
|
|
. |
|
|
|
|
|
|
|
|
|||||
u′′ ε |
|
|
|
|
|
|
|
|
||||||||||
|
u′′ |
|
|
u′ |
1 − u |
|
|
|
|
|
|
|
|
|
|
|||
Рассмотрим следующий математический эксперимент. В качестве |
||||||||||||||||||
замеров yi |
возьмем «зашумленные» значения решения уравнения (2.13) |
|||||||||||||||||
при θ = 1 и начальном условии u(0) = 0 : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
yi = 1 − e−ti + εi , |
|
εi |
|
≤ 0,01, |
|
|
|
|
(2.16) |
|||||||
|
|
|
|
|
|
|
|
|||||||||||
vk.com/club152685050 | vk.com/id446425943 |
|
|
|
|
96 |
Глава 2 |
|
|
|
и используем их для оценки величины θ по формуле (2.14). Считая u ~ 0,5, |
||||
u′′ = e−t ~ 0,5 , получим, |
что оптимальное значение ∆t |
в этих условиях |
||
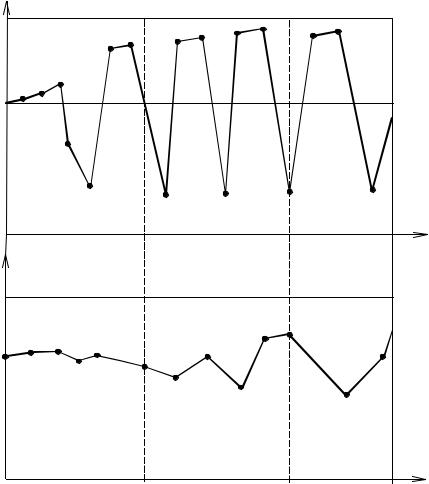
равно 0,2. На рис. 2.1. приведены оценки величины θ |
для разных момен- |
|||
тов времени при ∆t =0,02 и ∆t =0,2 (см. рис. 2.1, а и б соответственно). |
||||
θ |
|
|
|
|
1,0 |
|
|
|
|
|
|
а) |
|
|
0,5 |
|
|
|
t |
|
|
|
|
|
θ |
|
|
|
|
0,9 |
|
|
|
|
|
|
б) |
|
|
0,4 |
1 |
2 |
|
t |
|
|
|||
Рис. 2.1. Оценки величины θ для разных моментов времени при ∆t =0,02 и ∆t =0,2
Как видим, при ∆t =0,02 проявляется неустойчивость решения об- ратной задачи. Увеличение промежутка времени между замерами до ∆t =0,2 устраняет неустойчивость при t ≤ 1, но приводит к смещению
оценки на 10%. При t > 1 неустойчивость появляется за счет уменьшения величины 1–u.
Операция интегрирования, являясь обратной операции дифференци- рования, в отношении воздействия на погрешности обладает также проти- воположными свойствами: при интегрировании погрешности эксперимен- тальных функций сглаживаются. В ряде случаев, подвергая дифференци- альное уравнение различным интегральным преобразованиям, можно по- лучить выражения, в которых будут отсутствовать производные экспери-