

7. Багатоканальна система радіозв'язку
Канальні
повідомлення rk1(t),
rk2(t),…,rkN(t),
що надходять від N незалежно діючих
джерел інформації за допомогою пристроїв,
що називають канальними передавачами,
перетворяться у відповідні канальні
сигнали
![]() .
Перетворення — взаємооднозначне
і може бути представлено деяким оператором
.
Перетворення — взаємооднозначне
і може бути представлено деяким оператором
![]() так, що для будь-якої реалізації
повідомлення i-го каналу можна записати
так, що для будь-якої реалізації
повідомлення i-го каналу можна записати
![]()
Усі N канальних сигналів далі складаються, у результаті чого виходить складне коливання виду
![]()
де і=1,2,3,...,N.
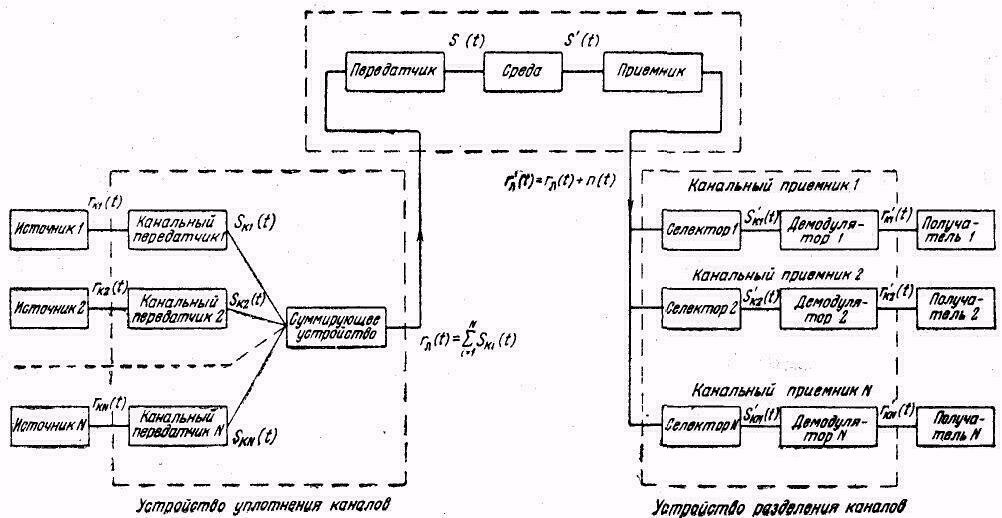
Рис. 3.1
У
загальному передавачі це коливання
знову перетвориться в сигнал, але тепер
уже, як правило, високочастотний.
Перетворення і тут однозначне і
відображається оператором М.
У результаті утвориться сигнал![]() ,
що далі випромінюється в простір.
,
що далі випромінюється в простір.
Канальні передавачі, разом з підсумовуючим пристроєм, утворять пристрій ущільнення багатоканальної системи зв'язку. Загальний передавач, середовище і загальний приймач утворять загальний (груповий) канал чи зв'язку лінію зв'язку багатоканальної системи. По своїй структурі ця лінія нічим не відрізняється від звичайної одноканальної системи радіозв'язку.
Коливання
![]() ,
що представляє собою суму канальних
сигналів, часто називаних модульованими
несучими, можна розглядати як складне
повідомлення і називати лінійним
багатоканальним
повідомленням (груповим сигналом), а
коливання s(t),
що
виходить на виході передавача сигналом.
,
що представляє собою суму канальних
сигналів, часто називаних модульованими
несучими, можна розглядати як складне
повідомлення і називати лінійним
багатоканальним
повідомленням (груповим сигналом), а
коливання s(t),
що
виходить на виході передавача сигналом.
На вході загального приймача приймається сигнал s'{t), що відрізняється від переданого. Останнє порозумівається тим, що передача і прийом сигналів супроводжуються перешкодами і перекрученнями, тому для сигналу на вході приймача можна записати
s’(t)=k(t)s(t)+h(t)
де h(t)- деяке коливання, обумовлене дією адитивних перешкод і перекручувань; k(t)-коефіцієнт, що враховує дія мультиплікативних перешкод і перекручувань.
У приймачі
(мал. 3.1) відбувається зворотне перетворення
сигналу в лінійне повідомлення
![]() .
Робота приймача характеризується деяким
оператором М-1,
що є зворотним оператору М.
Без обліку дії мультиплікативних
перешкод на виході приймача
.
Робота приймача характеризується деяким
оператором М-1,
що є зворотним оператору М.
Без обліку дії мультиплікативних
перешкод на виході приймача
![]()
де n(t) — продукти перешкод і перекручувань на виході приймача.
Перетворення
за допомогою оператора М-1
повинне бути однозначним, інакше тому
самому сигналу S'(t)
буде відповідати кілька різних коливань
![]() ,
що приведе до помилок при прийомі
повідомлень.
,
що приведе до помилок при прийомі
повідомлень.
Таким чином, необхідна умова нормальної роботи лінії зв'язку — взаємна однозначність перетворень, здійснюваних операторами М и М-1, що характеризують відповідно роботу передавача і приймача.
Коливання
далі надходить на пристрій поділу, де
поділ і демодуляція канальних сигналів
здійснюються канальними приймачами.
Селекторні пристрої можуть бути лінійними
чи нелінійними, з постійними чи перемінними
параметрами. Дія кожного канального
селектора характеризується деяким
оператором
![]() ,
Процес поділу при цьому можна представити
як дія оператора поділу
на коливання
,
у результаті чого на виході селектора
l-го
каналу
виділяється відповідний канальний
сигнал
,
Процес поділу при цьому можна представити
як дія оператора поділу
на коливання
,
у результаті чого на виході селектора
l-го
каналу
виділяється відповідний канальний
сигнал
![]() ,
a всі інші сигнали затримуються. При
відсутності перешкод процес поділу
можна представити наступними
співвідношеннями:
,
a всі інші сигнали затримуються. При
відсутності перешкод процес поділу
можна представити наступними
співвідношеннями:
![]()
Умова
виражає властивість l-го
селектора відгукуватися лише на сигнали
![]() цього каналу і не реагувати на сигнали
всіх інших каналів. Величина і характер
відгуку повинні бути однозначно зв'язані
з відповідним канальним сигналом. При
цьому основній умові поділу сигналів
і найбільш загальному визначенні
виборчих властивостей зовсім неважливо,
який вид має відгук селектора
на сигнал
цього каналу і не реагувати на сигнали
всіх інших каналів. Величина і характер
відгуку повинні бути однозначно зв'язані
з відповідним канальним сигналом. При
цьому основній умові поділу сигналів
і найбільш загальному визначенні
виборчих властивостей зовсім неважливо,
який вид має відгук селектора
на сигнал
![]() .
.
У
канальних приймачах (мал. 3.1) відбувається
зворотне перетворення канальних сигналів
![]() у повідомлення
у повідомлення
![]() .
Дія цих приймачів характеризується
оператором
.
Дія цих приймачів характеризується
оператором
![]() ,
що для забезпечення взаємної однозначності
перетворення повинний бути зворотним
оператору
.
У результаті перетворення виходить
вихідне канальне повідомлення, тобто
,
що для забезпечення взаємної однозначності
перетворення повинний бути зворотним
оператору
.
У результаті перетворення виходить
вихідне канальне повідомлення, тобто
![]()
Канальні селектори разом з канальними демодуляторами утворять пристрій поділу каналів багатоканальної системи зв'язку. Характерною рисою багатоканальних систем радіозв'язку є дворазове перетворення повідомлень у сигнали і назад і, як наслідок цього, наявність пристроїв ущільнення і поділи канальних сигналів. Це ставить перед технікою багатоканальної зв'язку кілька проблем, головна з який проблема надійного поділу канальних сигналів на прийомній стороні.
Відповідно до принципу поділу сигналів, що покладений в основу створення багатоканальних систем, їх підрозділяють на лінійні і нелінійні. Багатоканальна система лінійна, якщо поділ канальних сигналів відбувається в лінійних селекторах (фільтрах) з постійними чи перемінними параметрами, у протилежному випадку її відносять до нелінійних систем.