

144. Какой длины (в минутах) удобно использовать вектора при решении задач на маневренном планшете?
Векторы скоростей рекомендуется назначать равными 6 или 12 минутам.
145. Дайте описание алгоритма метода решения задач на расхождение с опасной (ными) целью (ями) на маневренном планшете.
Анализ обстановки с применением маневренного планшета производится следующим образом (рис. 18.1): — место своего корабля К считают в центре планшета; — по пеленгам и дистанциям, измеренным радиолокатором через 1—2 мин, наносят на планшет не менее двух мест цели; — через полученные точки М1, М2, М3 проводят линию относительного движения ЛОД1; — из центра планшета на ЛОД1 опускают перпендикуляр КС1, длина которого является кратчайшим расстоянием расхождения с целью DKV. Если DKp > Dоз, угрозы чрезмерного (опасного) сближения нет. Дальнейших расчетов и маневров не потребуется до тех пор, пока цель не изменит курс или скорость. Если DKp < Dоз, производится определение ЭДЦ: — из точки К откладывают вектор скорости своего корабля VK;
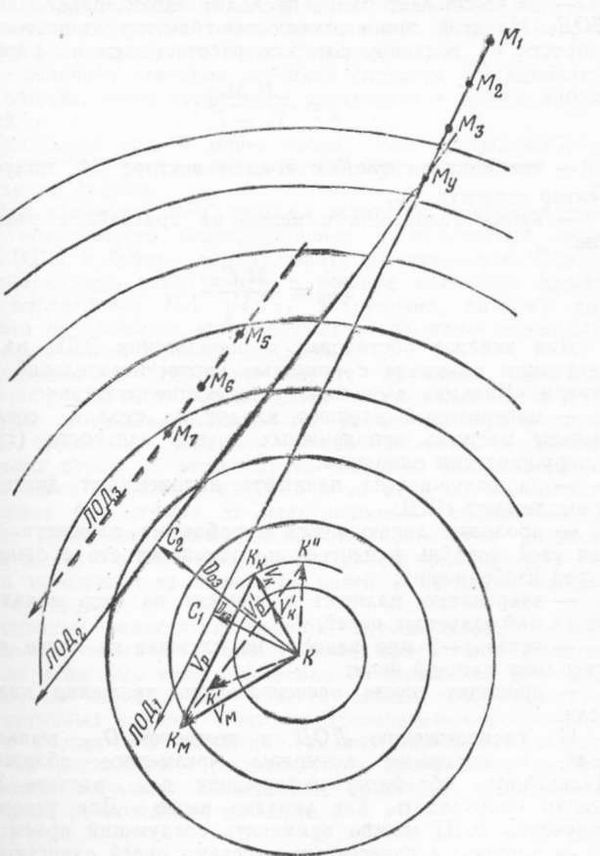 Рис.
18.1. Анализ обстановки, определение ЭДЦ
и расчет маневра расхождения с
одиночной целью на маневренном
планшете
Рис.
18.1. Анализ обстановки, определение ЭДЦ
и расчет маневра расхождения с
одиночной целью на маневренном
планшете
—
из конца вектора VK проводят линию,
параллельную ЛОД1 На этой линии откладывают
вектор относительной скорости Vр величину
которого рассчитывают по формуле
— соединив
точку К с концом вектора Vр получают
вектор скорости VM;
— время сближения
с целью на кратчайшее расстояние
Для анализа обстановки и определения ЭДЦ на маневренном планшете с помощью картосчислительной приставки «Пальма» выполняют следующие действия: — маневренный планшет кладут на стол и согласовывают масштаб неподвижных кругов дальности (НКД) с окружностями планшета; — на окружностях планшета надписывают дистанции и выключают НКД; — проводят линию курса корабля на планшете (считая свой корабль в центре) и совмещают его с отметкой курса изображения; — закрепляют планшет и наносят на него начальные места наблюдаемых целей; — через 1—2 мин наносят на планшет не менее двух-трех мест каждой цели; — проводят линии относительного движения каждой цели. По расположению ЛОД и величине DKp выявляют цели, с которыми возможно чрезмерное сближение. Дальнейшую обработку информации для расчета ЭДЦ можно производить, как указано выше. Для ускорения получения ЭДЦ молено применять следующий прием: — планшет с нанесенными местами целей сдвигают назад по курсу на величину пройденного кораблем за время наблюдений расстояния; — наносят новые отметки целей, сдвигая каждый раз планшет назад по курсу на величину пройденного расстояния; — соединив прямой места целей, получают направление вектора истинной скорости каждой из них, направленной от предыдущих точек к последующим; — величину векторов истинной скорости рассчитывают, как обычно, через пройденное расстояние и время наблюдений.
146. Как рассчитывается точка пересечения курсов судов?
На рисунке приведен пример относительной прокладки с построением прямого векторного треугольника. Проведя через позиции I и 2 судна Б его ЛОД, можно определить Dкр. Затем рассчитать tкр, которое равно 12 мин (отсчет периода ведется от позиции 2 на ЛОД), Зная Vн и определив V0, можно рассчитать вектор скорости судна-цели Б — Vц. Определив направление вектора цели, можно рассчитать точку пересечения нашим судном курса судна Б, а также tпер. Для определения точки пересечения курса из центра планшета проводят линию, параллельную вектору Vц, до пересечения с ЛОД. Таким образом, базовым параметром векторного треугольника скоростей и относительной прокладки является V0. Поскольку направление и величина V0 зависят от Vн я Vц (от курса и скорости каждого из судов), изменение любого из четырех исходных элементов закономерно приводит к изменению его направления и величины. Соответственно изменяются направление ЛОД, Dкр, tкр, Dпер,tпер улучшая или ухудшая складывающуюся ситуацию.
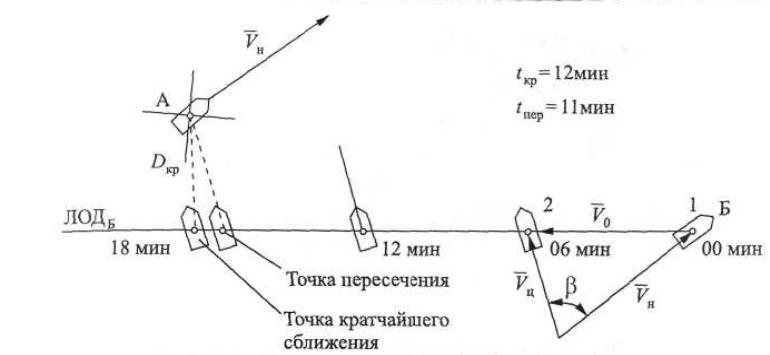
Рис. Определение точки пересечения курса