

138. Правило взятия дистанций?
Измерение расстояний. Почти во всех современных РЛС измерение расстояний выполняется с помощью дальномерного устройства, имеющего подвижное кольцо дальности (ПКД). В этом случае точность измерений зависит от инструментальной ошибки (±10—15 м), масштабной ошибки и ошибки совмещения ПКД с отметкой эхо-сигнала.
В радиолокационных станциях, где дальномерное устройство отсутствует, измерения расстояний производятся путем глазомерной интерполяции положения отметки эхо-сигнала между неподвижными кольцами дальности (НКД). Точность измерений этим способом ниже и зависит от ошибок положения колец дальности, нелинейности хода развертки и величины интервала между НКД.
Суммарная средняя квадратичная ошибка измерения расстояния помощью ПКД до точечного ориентира составляет ±0,6—1,0 %, до береговой линии — 0,6—3,0 % от измеренного расстояния.
139. Используя режим относительного движения, решить задачу на расхождение с одной целью – предоставить чертеж и описание последовательности действий.
Любое изменение движения судна необходимо считать маневром, выбор и расчет которого должны производиться заблаговременно. При маневрировании используется один из трех видов маневра:
изменение курса;
изменение скорости;
комбинированный маневр (изменение и курса, и скорости).
Маневр изменением курса
Наше судно следует в тумане ИКН = 270°; VH=25yз. На экране РЛС мы обнаружили эхо-сигнал встречного судна и после серии наблюдений получили следующие данные:
T, ч, мин П, град D, мили
13,20 320,0 10,0
13,23 320,0 8,5
13,26 320,0 7,0
Поскольку пеленг на встречное судно не изменяется, существует опасность столкновения. Решаем разойтись с ним на расстоянии 3-х миль отворотом вправо в 13ч 29 мин. Для решения задачи надо рассчитать наш новый курс ИКН, угол отворота вправо α, судовое время Трасх и пеленг на встречное судно Прасх, когда будет можно лечь на прежний курс, а также дистанцию отхода до первоначального курса Dотх.
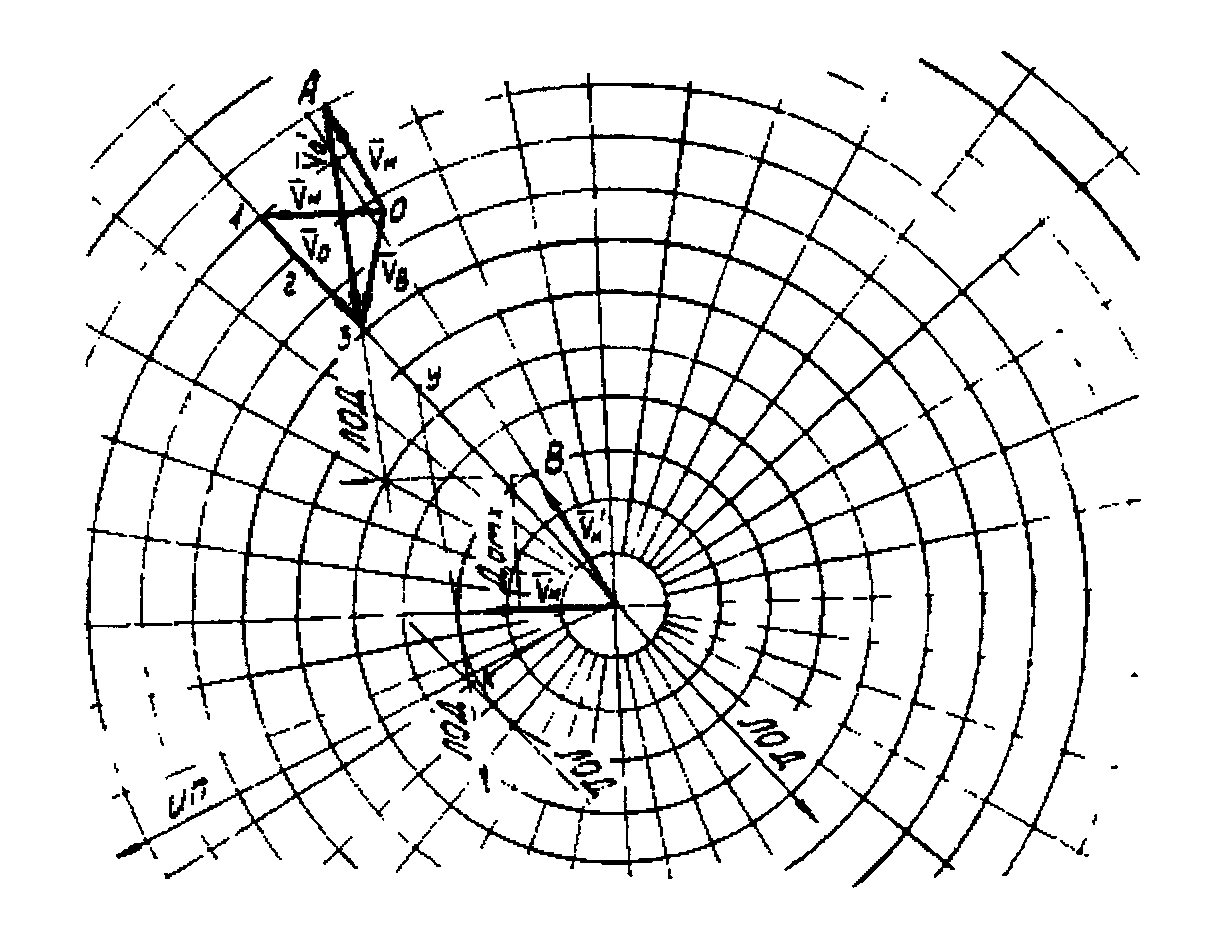
Рис. Решение задачи на МП
Наносим относительные позиции встречного судна 1,2, о на маневренный планшет и проводим ЛОД (рис. 23). Строим векторный треугольник 1, О1, 3. Получаем DKP = 0 ИКВ=19З°0; VB = 24 уз. Наносим на ЛОД упрежденную
точку У Из нее проводим новую ЛОД' касательной к окружности, описанной радиусом, равным D3=3мили. Переносим ЛОД в конец VB (в точку 3) . Из точки O1 радиусом равным VH, делаем засечку на ЛОД в правую сторону —
получаем точку A. Направление отрезка О1А, перенесенного в центр планшета, дает нам курс расхождения со встречным судном ИК'H=З2З°0; угол отворота а=ИКH— — ИК'H = 323°0—270°0=53°0. Проводим старую ЛОД касательной к окружности радиуса 3 мили. В месте пересечения ЛОД и ЛОД' получаем точку K. Пеленг на встречное
судно по окончании расхождения Прасх=24500. Измеряем отрезок УK и делим его на новую относительную скорость: УK=Sрacx = 5,4 мили; V0=46 уз:
tрасх = 5,4 : 46 = 7 мин.
Судовое время окончания расхождения Tpacx = Ty + tрacx =
=13 ч 29 мин + 7 мин=13ч36мин. Определим путь, пройденный нашим судном за время расхождения по новому курсу:
SOTX=V'H · tpacx=25yз ·7 мин = 2,9 мили.
Откладываем из центра Sотх по новому курсу ИКН=323о0 и из полученной точки B проводим VН. Определяем дистанцию отхода от первоначального курса: DОТХ=2,7мили.
Маневр изменением скорости
Наше судно следует ИКН=10°0 со скоростью VH=25 уз. В результате наблюдения за эхо-сигналом встречного судна на экране РЛС получаем следующие данные:
T, ч, мин П, град D, мили
11,20 310,0 10,0
11,23 310,0 8,5
11,26 310,0 7,0
Требуется определить нашу скорость V'H , которую необходимо назначить в 11 ч 29 мин, чтобы разойтись со встречным судном на D3 = 3 мили.
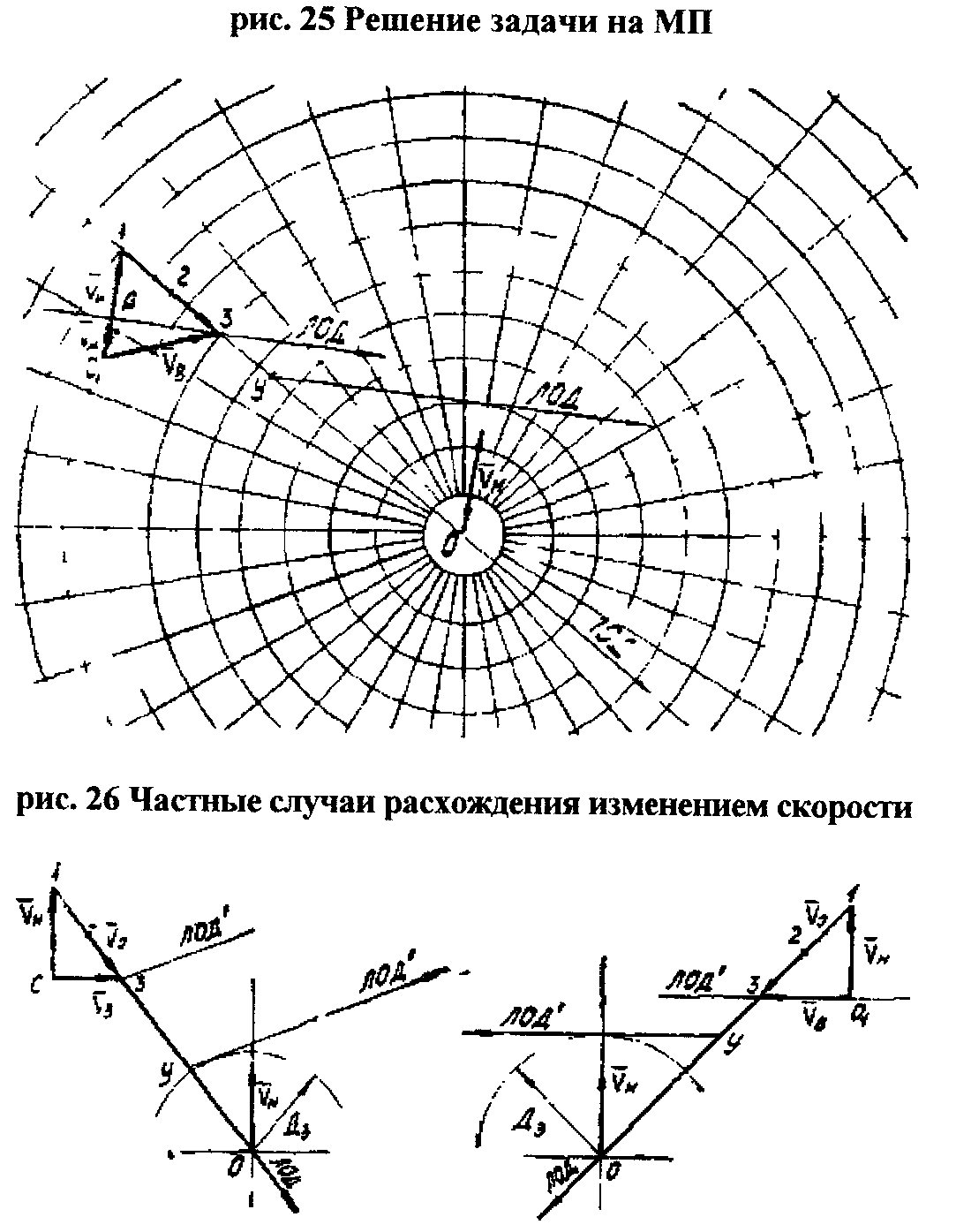
После построения векторного треугольника 1, О1, 3 на маневренном планшете выбираем на ЛОД упрежденную точку У и проводим новую ЛОД'
касательной к окружности радиуса 3 мили (рис. 25) Переносим новую ЛОД' в конец VB и на пересечении ее с VH получаем точку A. Отрезок О1А есть искомая скорость: VH=9 уз.
Если же при перенесении новой ЛОД' в конец VB она не пересекает вектор нашей скорости VH, то расхождение уменьшением скорости невозможно. А если ЛОД' совпадает по направлению с VB и накладывается на нее, надо
срочно остановиться и погасить инерцию (рис.26).
Комбинированный маневр
Комбинированный маневр решается двумя способами:
1. Наше судно следует ИКН = 350°0 со скоростью VН = 25 уз.
B результате наблюдений за встречным судном с помощью РЛС мы получили следующие данные:
T, ч, мин П, град D, мили
03,15 60,0 10,0
03,18 60,0 8,5
03,21 60,0 7,0
Требуется определить нашу скорость VH, которую необходимо назначить в 03 ч 24 мин для расхождения со встречным судном на D3 = 3 мили, при условии, что одновременно наше судно ляжет на ИКн = 42°0 (рис. 28).
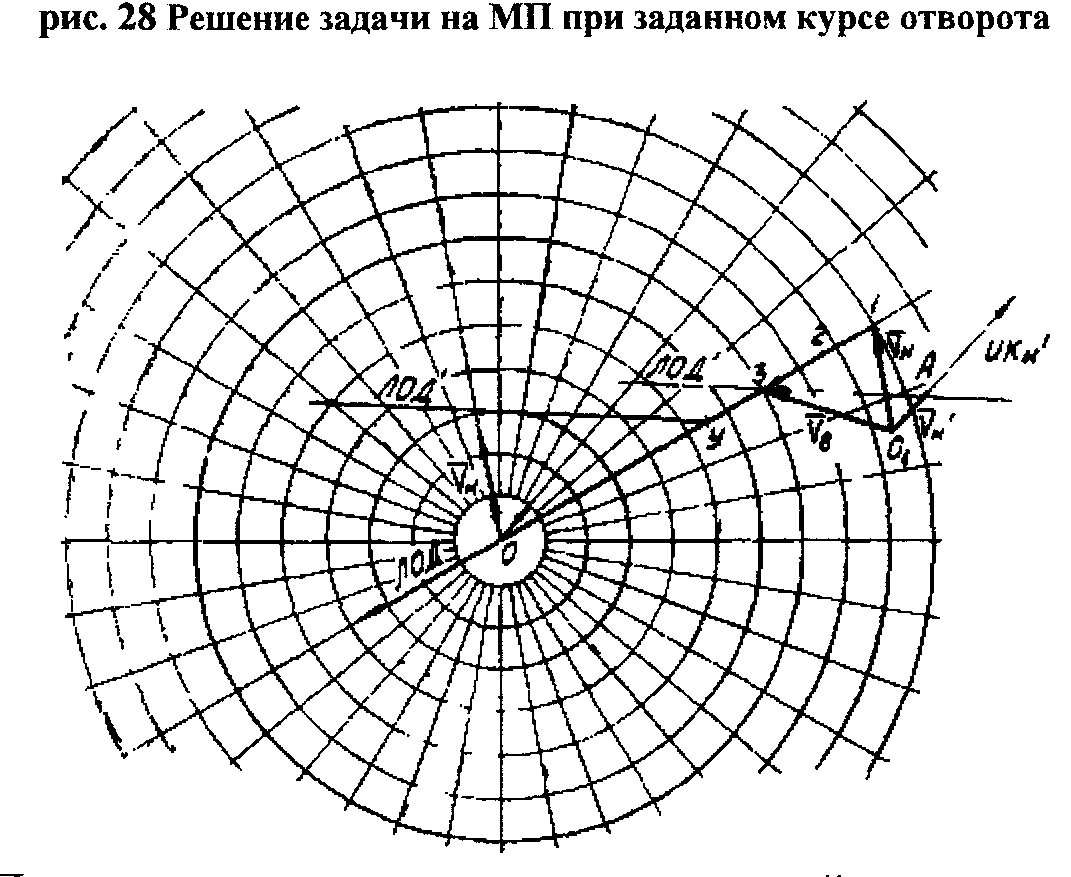
После нанесения точек на маневренный планшет, проведения ЛОД и построения векторного треугольника уже известным способом выбираем по времени упрежденную точку и наносим ее на ЛОД. Из упрежденной точки У
проводим новую ЛОД' касательной к окружности радиуса D3= 3 мили. Переносим ЛОД' в конец вектора VB.
Из точки О1 проводим линию нового курса: ИКН = 42°0. В
месте пересечения ЛОД' и линии ИКН получаем точку А.
Величина отрезка О1А есть наша новая скорость на ИКН=42°0 для расхождения со встречным судном на расстоянии в 3 мили; VH = 11 уз.
2. Наше судно следует ИКН = 330°0 со скоростью VH = 25уз. В результате наблюдений за встречным судном с помощью РЛС мы получили следующие данные:
T, ч, мин П, град D, мили
12,30 30,0 10,0
12,33 30,0 8,5
12,36 30,0 7,0
Требуется определить наш новый курс ИКН, на который необходимо лечь в 12 ч 39 мин для расхождения со встречным судном на D3 = 3 мили, при условии, что одновременно мы уменьшим ход до 15 уз.
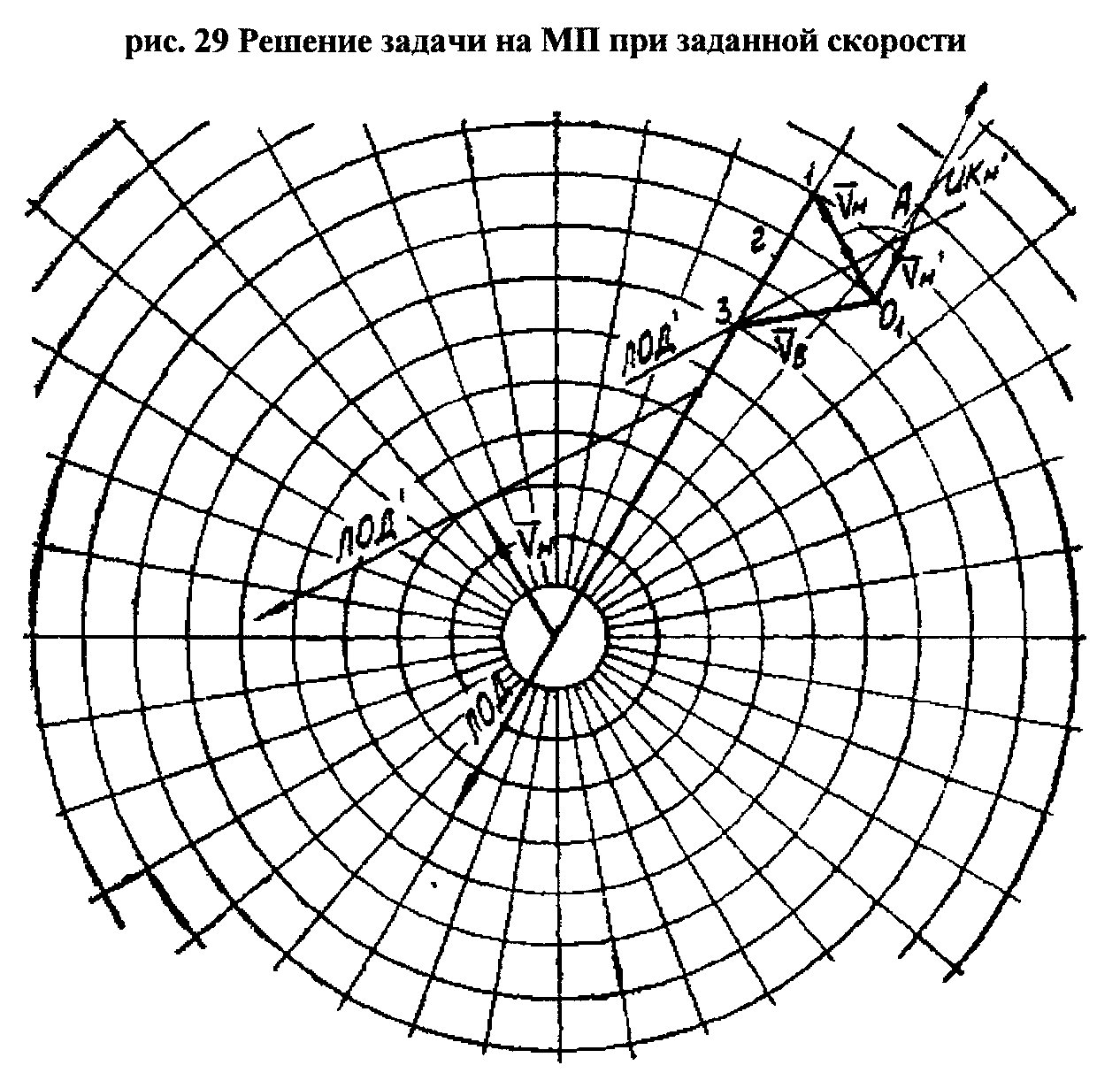
После перенесения ЛОД' в конец VВ (рис. 29) мы из точки О1 радиусом, равным нашей новой скорости V'H = = 15 уз, делаем засечку на ЛОД в правую сторону и получаем точку A. Направление отрезка O1A, перенесенного в центр планшета (точку О ), даст нам новый курс для расхождения со встречным судном на расстоянии в 3 мили.
Определение окончания расхождения и момента возвращения к первоначальным элементам движения судна рассчитывается так же, как «маневре изменения курса». Там же приведен пример расчета дистанции отхода от первоначального курса. В данном примере при расчете SOTX нам надо использовать нашу новую скорость.