

85. Как отображаются данные путевых точек целей на рлс «furuno»?
На экране радара может быть отмечен маркер путевой точки, который показывает местонахождение путевой точки назначения, заданной на плоттере.
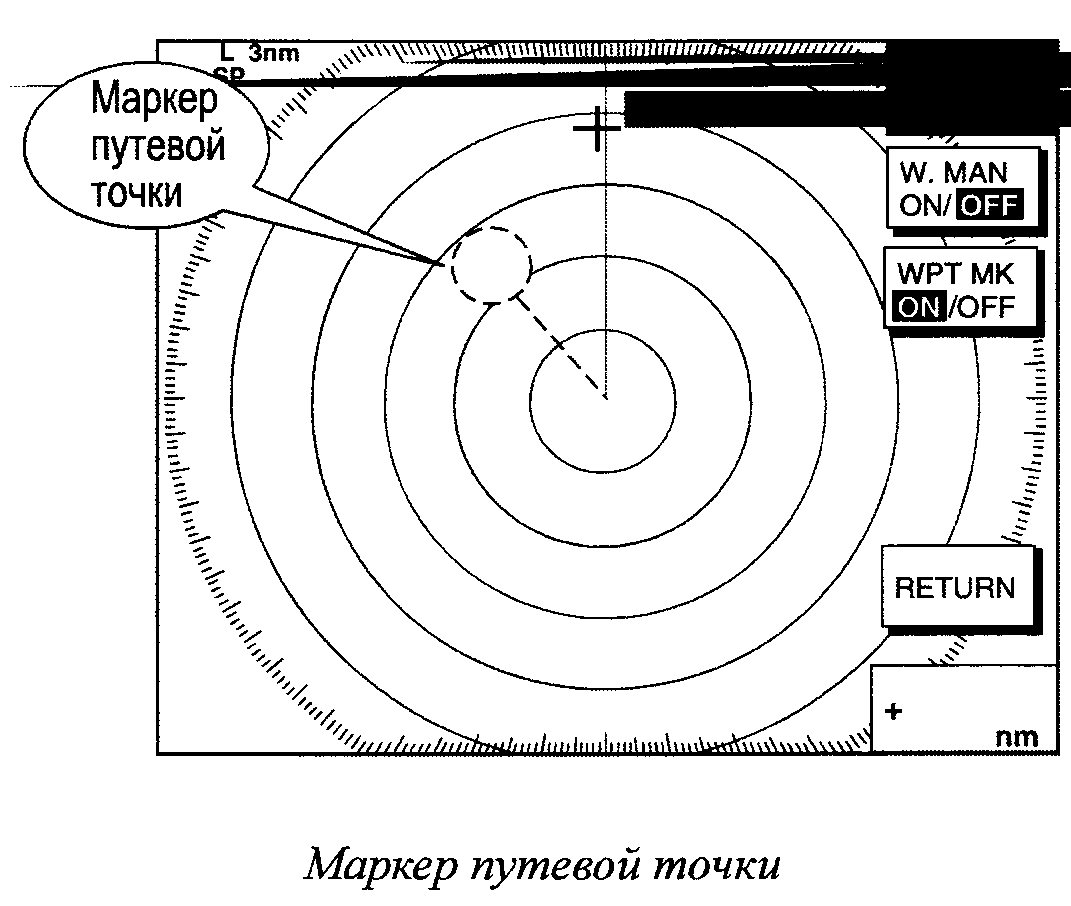
Если экранные кнопки радара еще не показаны, то для их отображения нажмите клавишу HIDE/SHOW.
Нажмите экранную кнопку NAV FUNG.
Нажмите экранную кнопку WPT MK ON/OFF (МАРКЕР ПУТЕВОЙ ТОЧКИ ВКЛ./ВЫКЛ.), чтобы выбрать ОN (ВКЛЮЧЕН) или ОFF (ВЫКЛЮЧЕН), в зависимости от ситуации.
Нажмите экранную кнопку RETURN для завершения.
86. Как отображаются данные путевых точек целей на рлс «Nucleus»?
Информация по цели выдается в окне Target Data в следующем виде:
TARGET 1 |
Номер цели |
ВRG 056° (Т) |
Пеленг ((Т) - истинный или (К) - относительный) |
RANGE 3.3 nm |
Дальность в морских милях |
COURSE 3490 (Т) |
Курс в градусах |
SPEED 2.7 kts |
Скорость в узлах |
СРА оr ВСR 3.2 nm |
Дистанция кратчайшего сближения (морские мили) или дистанция до точки пересечения курсов |
ТСРА оr ВСТ 2.2 min
|
Время до кратчайшего сближения (минуты) или время до пересечения курсов |
87. Как устанавливается интервал отображения путевых точек?
88. Как установить и изменить длину следа послесвечения цели?
Различная длина следа послесвечения указывает на различную скорость целей.
Вы можете вывести на дисплей следы послесвечения для всех судов-целей, чтобы оценить их элементы движения. Следы могут быть показаны как в режиме Истинного движения, так и в режиме Относительного движения в одном цвете и с несколькими градациями цвета.
ВЫБОР ВРЕМЕНИ ДЛИНЫ СЛЕДОВ
Вы можете выбрать это время, нажав клавишу 'ECHO TRAILS'. Каждое нажатие этой клавиши в пределах 5 секунд после предыдущего последовательно изменяет длину так: 30 секунд, 1 минута, 3 минуты, 6 минут, 15 минут, 30 минут и постоянно.
89. С чем можно ассоциировать след послесвечения цели в режиме относительного движения?
Если судно наблюдателя, или объект наблюдения, или то и другое вместе будут двигаться, эхо-сигнал объекта также будет непрерывно перемещаться на индикаторе РЛС, оставляя за собой слабый светящийся след (хвост послесвечения).
90.Что такое контрольные точки и для чего они используются?
После изучения районов плавания капитан по генеральной навигационной карте (картам) выбирает маршрут перехода судна, разделив весь маршрут на участки в зависимости от обстановки и гидрометеорологических условий, намечает контрольные точки, которые являются контролем за выполнением графика рейса. Каждая контрольная точка имеет свои координаты и время прибытия в нее.
91. Когда надо начинать маневр судна в реальной ситуации и что при этом необходимо учесть?
92. Что такое GPS, DGPS и в чем их различие?
GPS - Глобальная система навигации и позиционирования. Сеть спутников, которые постоянно передают закодированную информацию, с помощью которой можно точно определить месторасположение на земле путем измерения расстояния до спутников.
DGPS – это дифференциальный режим GPS, обычно применяемый на водных суднах и в лесной местности. Работа системы DGPS практически ничем не отличается от работы GPS. Однако в работу первой вступает дополнительный стационарный приёмник или базовая станция. Таким образом, происходит коррекция сигнала GPS. В работе участвуют в итоге два приёмника: стационарный и подвижный. Они находятся на относительно небольшом расстоянии друг от друга, если сравнивать с расстоянием до спутников, а также в похожих атмосферных условиях.
Это помогает более правильно определять координаты. От стационарного приёмника к подвижному затем поступает информация, нужная для корректировки. При такой работе GPS-навигатор может подключаться к программе River Surveyor и работать в ней. Это помогает более точно определять координаты судна, на котором установлена эта программа. Системы DGPS нашего времени помогают избежать ошибок в определении координат в сложных условиях, отклоняясь всего на несколько сантиметров. Но такие системы имеют свои недостатки: чтобы с ними работать, нужно находиться недалеко от базовых станций.