

140. Используя режим относительного движения, решить задачу на расхождение с двумя целями – предоставить чертеж и описание последовательности действий.
Судно А следует курсом Ка со скоростью Vа, а судно Б — курсом Кб со скоростью Vб. В первоначальный момент времени (00 мин) суда находились в точках А1 и Б2.
Относительная прокладка. Относительная прокладка выполняется на радиолокационном маневренном или накладном зеркальном планшетах, а также во всех типах САРП. Проведя через позиции Б1 и Б2 линию относительно движения цели — ЛОД, получаем отсчитываемый от меридиана относительный курс цели Б — КБ. Перемещение судна Б относительно судна А по отрезку Б1—Б2 за промежуток времени между позиционными измерениями есть относительная скорость V0.
Р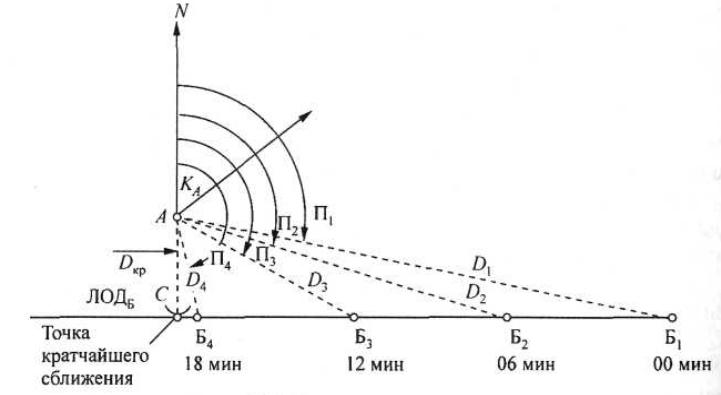 ис.
Относительная прокладка
ис.
Относительная прокладка
Из рис. видно, что для прогнозирования положения судна Б на ЛОД достаточно определить две его позиции в любой момент времени при условии, что судна будут сохранять неизменными свои курс и скорость. Последующие радиолокационные измерения позволяют убедиться в этом и уточнить полученные данные.
Благодаря тому, что при относительной прокладке наше судно всегда находится в центре планшета, т. е. его вектор движения геометрически вычитается из вектора движения всех других целей, оценка опасности ситуации предельно упрощается. В этом случае Dкр определяется (и глазомерно, и с помощью циркуля измерителя) по отстоянию ЛОД от центра планшета, который является позицией нашего судна. Точку D можно определить, опустив перпендикуляр из центра планшета на ЛОД, tкр можно рассчитать, разделив относительный путь S0=Б1' - С на относительную скорость Vо.
141. Используя режим относительного движения, решить задачу на расхождение с тремя целями – предоставить чертеж и описание последовательности действий.
Маневр по расхождению с несколькими встречными судами одновременно является наиболее сложным, но необходимость в нем возникает все чаще, особенно в районах оживленного судоходства. Предлагавшиеся до сих пор способы расчета этого маневра основаны на применении специальных палеток, скрывают от оператора физический смысл маневра и поэтому не прививаются на флоте. Наиболее рациональным является расчет с построением секторов опасных относительных курсов (COOK), предложенный О. Г. Моревым. Расчет маневра предлагаемым способом производится следующим образом (рис. 18.2): — с обнаружением на экране встречных судов (цели № 1, 2, 3) ведут за каждое из них относительную прокладку на маневренном планшете; — проведя ЛОДи ЛОД2 и ЛОД3, выявив опасность чрезмерного сближения с одной или несколькими целями, определяют их ЭДЦ (VМ1, VМ2_ и VМ3); — по цели с максимальной относительной скоростью (сближение с которой на Dкр произойдет раньше) назначают момент ее прихода в упрежденную позицию и наносят на этот момент упрежденные позиции каждой цели 1Mц, 2МЦ, ЗМЦ; — из упрежденной позиции каждой цели проводят касательные к окружности Dоз, определяя опасный сектор (ОС) каждой цели; — в конце каждого вектора истинной скорости цели Vм1, Vм2, Vм3 строят сектор опасных относительных курсов; — для безопасного расхождения со всеми целями одновременно изменяют свой курс или скорость так, чтобы конец своего вектора скорости VK располагался вне пределов COOK.
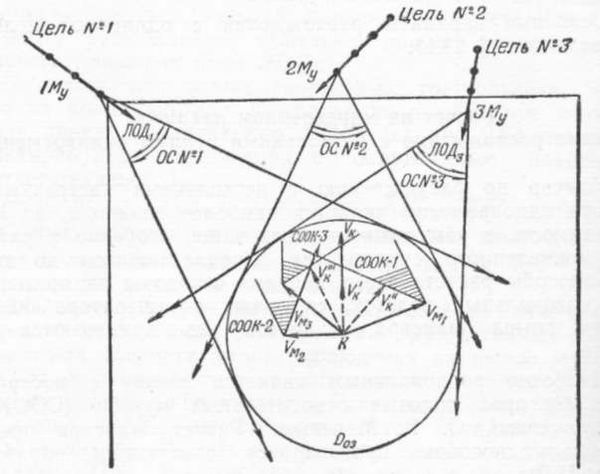 Рис.
18.2. Расчет маневра расхождения с
несколькими целями одновременно на
маневренном планшете
Рис.
18.2. Расчет маневра расхождения с
несколькими целями одновременно на
маневренном планшете
На рис. 18.2 видно, что уменьшение скорости до величины V'k позволяет разойтись со всеми целями на Dkp больше Doз. Если конец своего вектора скорости Vv будет лежать на границе СООК-1, то расхождение с целью № 1 произойдет на дистанции Doз, а с другими — на большей дистанции. Если конец своего вектора скорости V''к будет находиться в точке пересечения сторон СООК-2 и СООК-3, то расхождение на Doз произойдет с этими двумя целями, а с целью № 1 — на большей дистанции. Рассчитанные варианты расхождения докладываются командиру корабля для выбора и утверждения одного из них. Окончанием маневра расхождения со всеми целями можно считать момент прихода последней из них на относительный траверз.