117. Как вы понимаете термин «согласованный маневр» (действие)?
Совместные действия судоводителей расходящихся судов по продуманному скорректированному плану.
118. Скоростной векторный треугольник, его составляющие и их обозначения?
Обратившись к рис. 10, предположим, что наше судно следует истинным курсом ИК = 0° со скоростью VH = 20,0 уз. Исходя из этого условия, из центра планшета (точка О) проводим вектор скорости нашего судна VH уменьшенный в 10 раз, в масштабе, равном 0,1 уз между двумя окружностями. Измеряем пеленг П1 и дистанцию D1 на встречное судно и
пускаем секундомер. По измеренным величинам П1 и D1 наносим точку 1 на маневренный планшет и втыкаем в нее вектор скорости нашего судна VH.
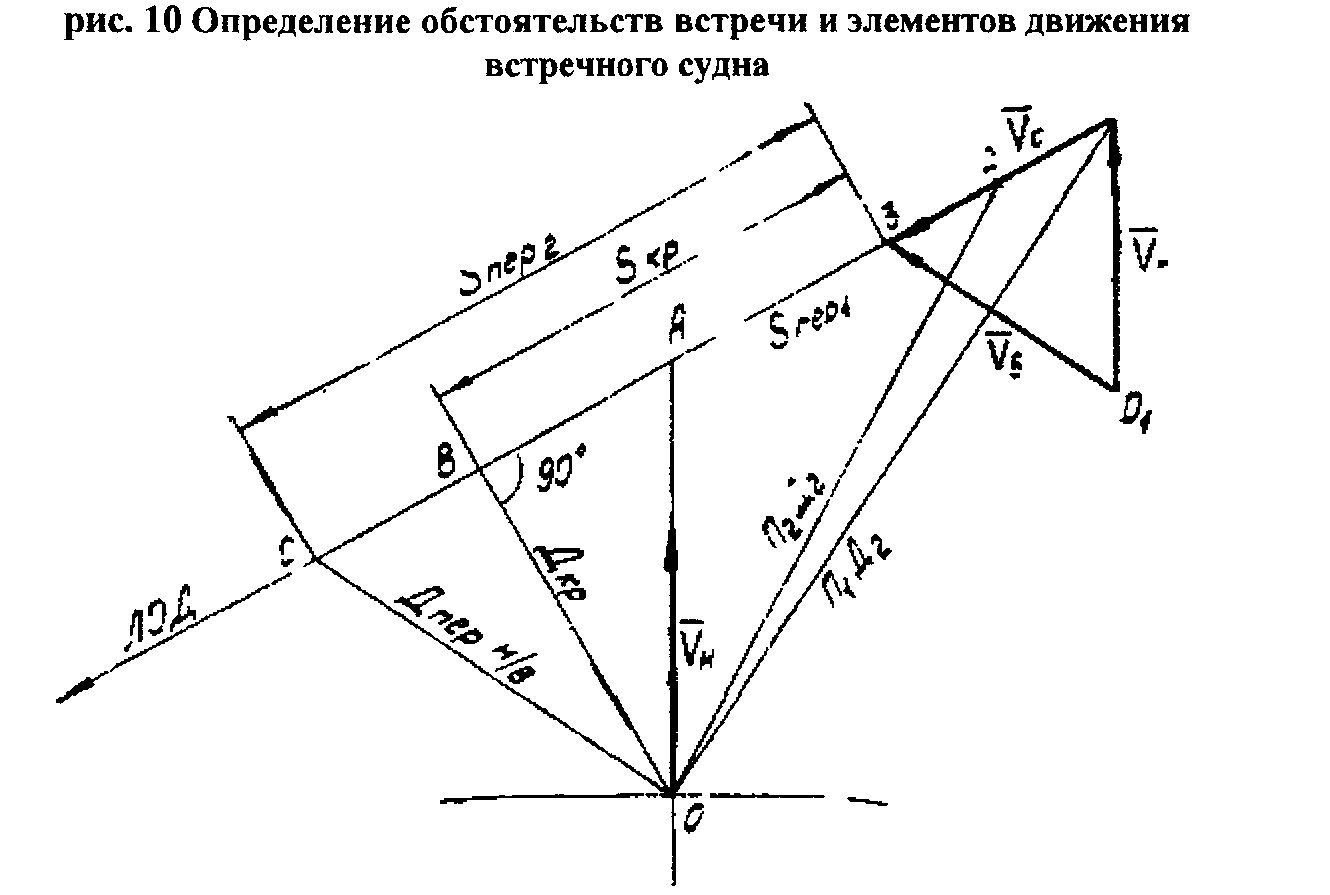
Поскольку мы уменьшили вектор скорости нашего судна в 10 раз, то самым оптимальным вариантом построения векторного треугольника будет промежуток времени в 6 мин. В этом случае длина вектора скорости нашего
судна равна плаванию его за это время (векторы скоростей изображаются в масштабе 1:10, удобном для устных расчетов). Измерение вторичных отсчетов пеленга П2 и дистанции D2 производим через 3 мин. По величинам П2, D2 наносим точку 2 на манёвренный планшет. Соединив точки 1 и 2 прямой, получим линию относительного движения. Сразу же обращаем
внимание на величину перпендикуляра ОВ, опущенного из центра планшета на ЛОД, — это кратчайшее расстояние (DKP), на которое сблизятся суда, или линейный фактор опасности. Он позволяет оценить, насколько опасно расхождение со встречным судном.
Теперь от точки 2 по ЛОД откладываем 3-минутный отрезок 1 , 2 — получаем точку 3. Образовавшийся при этом 6-минутный отрезок 1—3 есть относительная скорость V0, с которой эхо-сигнал встречного судна перемещается по экрану нашей РЛС. Соединив начало VH (точку O1) с точкой 3, получаем вектор скорости встречного судна VB (отрезок О1—3
направлен в точку 3). Измерив величину VB в выбранном масштабе и умножив ее на 10, получаем скорость встречного судна, а направление VB, перенесенное в центр планшета, позволяет определить курс встречного судна. Для определения момента наступления кратчайшего расстояния между судами (TKP) измеряем расстояние между точками 3 и В (SKP) и делим его на относительную скорость, в результате чего получаем время (tкр) в минутах, через которое суда сблизятся на Dкp после третьего момента наблюдений:
t кp = Sкр/V0 мин.
Прибавив полученный результат (tкp) к моменту третьего наблюдения (T3), получим момент наступления DKP по судовым часам (Tc) : Tc = T3 + tKP.
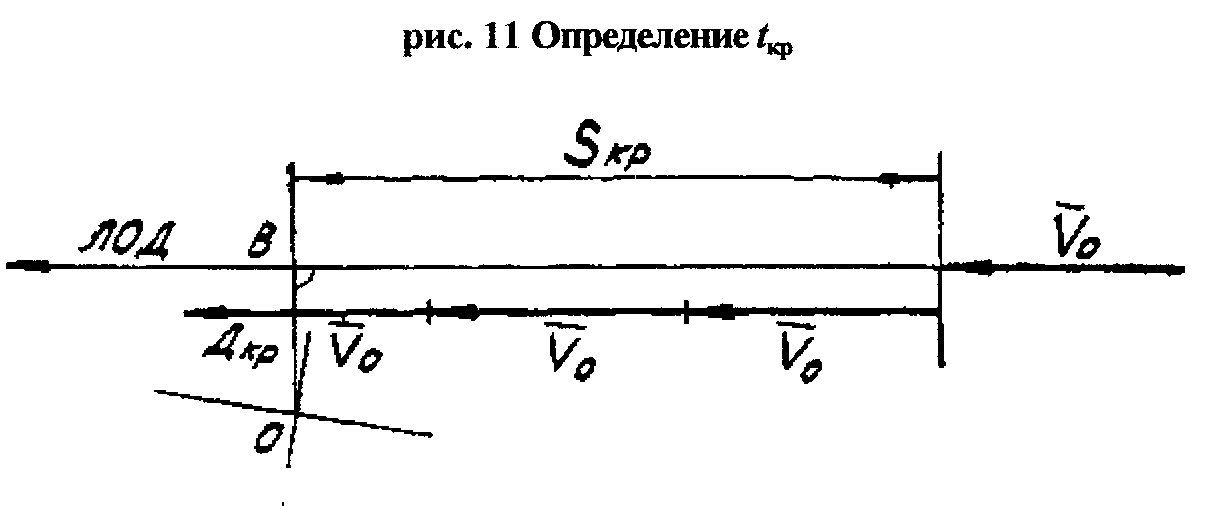
На практике tкр определяют двумя способами. Зная, что V0 — это расстояние, пройденное эхо-сигналом встречного судна за 6 мин, можно с помощью циркуля определить, сколько раз величина V0 уместится в отрезке Sкр, и полученный результат умножить на 6 мин (если образуется остаток, то нужно проинтерполировать на глаз относительно Vo и добавить полученные минуты) (рис. 11) .
На рисунке показан пример решения задачи с указанным условием. На отрезке 3—В=SKP вектор V0 умещается 2 раза. Значит, получаем: 6 мин·2= 12мин, и остается отрезок, на глаз равный половине V0, что составляет 3 мин.
Следовательно, 12мин + 3 мин=15мин (tKP=15 мин). Второй способ определения времени кратчайшего сближения — это использование логарифмической шкалы, с помощью которой по известным расстоянию SKP и скорости V0 находится время tKP (этот способ согласуется с третьим типом решения задач).