

10.3. Порядок выполнения работы
1) изучить технические характеристики и возможности прибора Ф-205.38.
2) Подготовить прибор к работе. Выбрать режим работы для проведения измерений параметров постоянного поля.
3) Произвести измерение напряженности постоянного магнитного поля на объектах, рассмотренных в подразд. 8.1 и 9.1:
а) перевести прибор в состояние «Измерение напряженности постоянно-го поля»;
б) установить преобразователь-полемер в точку измерения;
в) нажать кнопку «Запись» и произвести запись в память прибора первого измеренного значения напряженности магнитного поля, символ «:» при этом должен замениться на символ «р». номер измерения при занесении в память значения напряженности магнитного поля высвечивается в позициях 4 – 6 первой строки дисплея, например, на рис. 10.7 – это цифра 1.
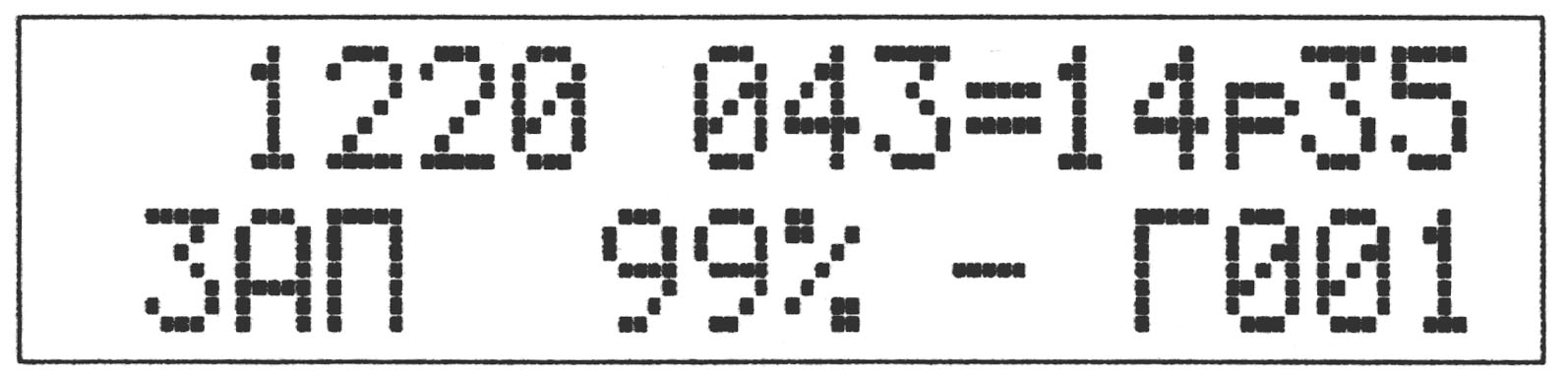
4) Перевести прибор в состояние «Измерение градиента напряженности магнитного поля». При записи значения градиента напряженности постоянного магнитного поля номер записи индицируется в позициях 14 – 16 второй строки дисплея (рис. 10.8).
Рис. 10.7. Вид экрана дисплея при записи
в память прибора значения
напряженности магнитного поля
Рис. 10.8. Вид экрана дисплея при
записи в память прибора значения
градиента напряженности магнитного
поля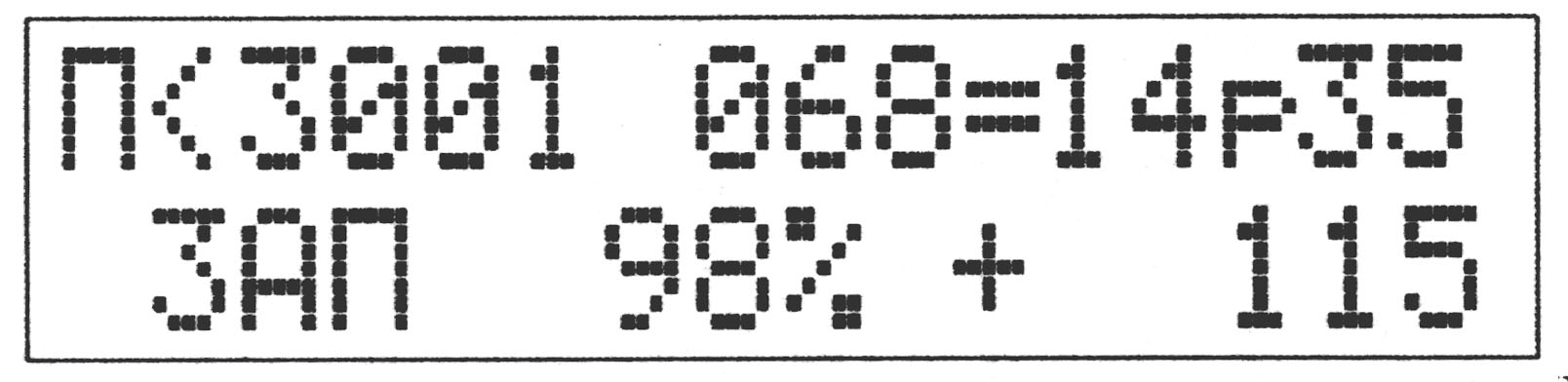
5) При работе прибора в режиме обнаружения дефектов установить значение порога срабатывания прибора в градиентометрическом режиме, используя СОП [6, табл. 1.6] для объекта, предложенного преподавателем.
6) произвести дефектоскопирование одной из зон объектов (технологию контроля см. в подразд. 8.1 и 9.1).
7) Сохранить полученные результаты измерения или контроля в памяти прибора с целью передачи их на компьютер для дальнейшей обработки:
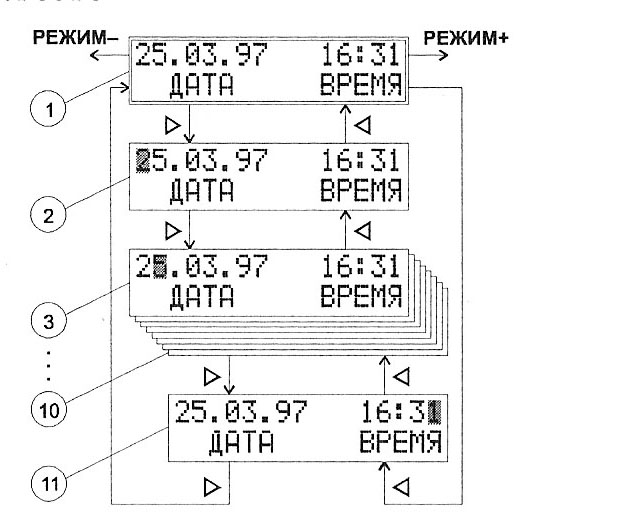
а) проверить служебную информацию (текущие дату и время), при необходимости изменить ее, используя карту переходов для состояния «Текущие дата и время» (рис. 10.9);
б) занести в память прибора технологическую информацию (заводские номера изделия контролируемой детали, коды контролируемой детали и предприятия-изготовителя, год изготовления контролируемой детали, табельный номер дефектоскописта) в соответствии с картой переходов для состояния «Готовность к вводу технологической информации» (рис. 10.10);
Рис.
10.10. Вид карты переходов для состояния
«Готовность к вводу технологической
информации»: 1 – готовность к вводу
технологической информации; 2 – маркер
в разряде единиц заводского номера
детали; 3 – маркер в разряде единиц
параметра детали; 4 – маркер в разряде
единиц года изготовления детали;
5 – маркер в разряде единиц кода
завода-изготовителя изделия; 6 – маркер
в разряде единиц личного
номера
дефектоскописта
Рис.
10.9. Вид карты переходов для состояния
«Текущие дата и время»: 1 – текущие дата
и время; 2 – маркер в разряде десятков
числа; 3 – маркер в разряде единиц числа;
4 – 9 – маркеры в разряде десятков
месяца, единиц месяца, десятков года,
единиц года, десятков часов, единиц
часов; 10 – маркер в разряде десятков
минут; 11 – маркер в разряде
единиц
минут
в) результаты измерения (значение напряженности или градиента напряженности магнитного поля над дефектом) или результаты дефектоскопирования ОК (тип дефекта, код зоны контроля, длина дефекта и заключение по дефекту в соответствии с данными приложения) записать в память прибора, нажав кнопку «запись».
8) Передать информацию на компьютер, выполнив следующие действия:
а) выключить прибор и подключить его с помощью кабеля к компьютеру, через последовательный порт компьютера СОМ1 или СОМ2 (в зависимости от того, какой порт компьютера используется);
б) подготовить компьютер к приему информации – запустить программу РМД-1, в меню «Дефектоскоп» выбрать пункт «Принять данные от дефек-тоскопа» (Пакет прикладных программ РМД-1. Руководство по эксплуатации / ООО «Микроакустика». Екатеринбург, 2004. 30 с.);
в) передать накопленную информацию на компьютер. Для этого переключить прибор в состояние «Готовность к передаче информации на компьютер» (рис. 10.11).
нажать кнопку «1» – прибор автоматически перейдет в режим передачи информации. Процесс передачи информации будет сопровождаться коротким звуковым и световым сигналами после передачи очередной строки информации. По окончании передачи прибор автоматически переключится в состояние «Передача информации завершена»;
г) получить в окне компьютера сообщение «Данные получены», если полученная информация от дефектоскопа успешно расшифрована.
9) Обработать полученную информацию с помощью стандартного пакета прикладных программ РМД-1 и вывести результаты контроля на печать.
Примечание. Пакет программ РМД-1 используется также при работе с дефектоскопом-градиентометром ДФ-201.1 и приборами магнитоизмерительными феррозондовыми комбинированными Ф-205.03, Ф-205.30А [6, п. 1.2.6 и 1.2.7].