

22. Основные операции производимые над векторами.
Суммой векторов a и b называется такой третий вектор c, что при совмещенных началах этих трех векторов, векторы a и b служат сторонами параллелограмма, а вектор c -- его диагональю (рис. 10.2).
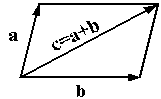
Сложение векторов называется сложением по правилу параллелограмма.
Вектор b
называется противоположным
вектору a, если a и b коллинеарные,
имеют противоположные направления и
![]() .
.
Вектор, противоположный
вектору a, обозначается
![]() ,
то есть
,
то есть
![]() .
.
Разностью
векторов a и b называется сумма
![]() .
Разность обозначается
.
Разность обозначается
![]() ,
то есть
,
то есть
![]() .
.
Произведением
вектора a на
вещественное число
![]() называется
вектор b, определяемый условием
называется
вектор b, определяемый условием
1)
![]() и,
если
и,
если
![]() ,
то еще двумя условиями:
,
то еще двумя условиями:
2) вектор b коллинеарен вектору a;
3) векторы b
и a
направлены одинаково, если
![]() ,
и противоположно, если
,
и противоположно, если
![]() .
.
Произведение
вектора a на число
обозначается
![]() (рис
1.4).
(рис
1.4).

Рис.10.4.Умножение вектора на число
Когда речь идет о связи векторов с числами, то иногда числа называют скалярами. Таким образом, определение 10.9 задает умножение вектора на скаляр.
Рассмотрим некоторые свойства операций сложения и умножения вектора на число. Часть из них, которые будут особенно важны при обобщении понятия вектора, выделим в отдельную теорему.
Для любых векторов
![]() и
любых вещественных чисел
и
любых вещественных чисел
![]() выполняются
следующие свойства:
1)
выполняются
следующие свойства:
1)
![]() (свойство
коммутативности
операции сложения);
2)
(свойство
коммутативности
операции сложения);
2)
![]() (свойство
ассоциативности
операции сложения);
3)
(свойство
ассоциативности
операции сложения);
3)
![]() ;
4)
;
4)
![]() ;
5)
;
5)
![]() (свойство
ассоциативности по отношению к числам);
6)
(свойство
ассоциативности по отношению к числам);
6)
![]() (свойство
дистрибутивности
по отношению к умножению на число);
7)
(свойство
дистрибутивности
по отношению к умножению на число);
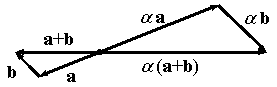
7)
![]() (свойство
дистрибутивности по отношению к умножению
на вектор;
8)
(свойство
дистрибутивности по отношению к умножению
на вектор;
8)
![]() .
.
Случаи, когда или a и b коллинеарны, предоставляем проанализировать читателю самостоятельно.
Для доказательства
свойства 7 заметим, что векторы
![]() и
и
![]() коллинеарны.
Без ограничения общности можно считать,
что
коллинеарны.
Без ограничения общности можно считать,
что
![]() (в
противном случае поменяем местами
и
(в
противном случае поменяем местами
и
![]() в
доказываемом равенстве).
в
доказываемом равенстве).
Пусть
и
одного
знака. Тогда
![]() ,
,
![]() .
.
Пусть
и
имеют
разные знаки. Тогда
![]() ,
,
![]() .
Получили, что
.
Получили, что
![]() в
обоих случаях.
в
обоих случаях.
Векторы f
и g
имеют одно направление. Оно совпадает
с направлением a
при
и
противоположно при
.
Следовательно,
![]() .
Свойство 7 доказано.
.
Свойство 7 доказано.
Свойство 8 очевидным образом вытекает из произведения вектора на число.
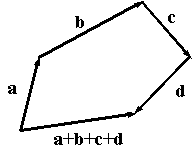
Из свойства ассоциативности следует, что в сумме векторов, содержащей три и более слагаемых, можно скобки не ставить. Как найти сумму нескольких слагаемых, не используя попарных сумм, видно из рисунка 10.7.
Сформулируем еще
несколько очевидных свойств операций
сложения и умножения вектора на число:
9) равенство
![]() верно
тогда и только тогда, когда или
верно
тогда и только тогда, когда или
![]() ,
или
,
или
![]() ;
10) вектор,
противоположный вектору a,
равен
;
10) вектор,
противоположный вектору a,
равен
![]() ,
то есть
,
то есть
![]() ;
11) для любых
векторов a
и b
существует такой вектор x,
что
;
11) для любых
векторов a
и b
существует такой вектор x,
что
![]() .
.
23. Линейные отображение в лвп. Предоставление линейных преобразований матрицами..
Лине́йное отображе́ние, лине́йный опера́тор — обобщение линейной числовой функции (точнее, функции y = kx) на случай более общего множества аргументов и значений. Линейные операторы, в отличие от нелинейных, достаточно хорошо исследованы, что позволяет успешно применять результаты общей теории, так как их свойства не зависят от природы величин.
Лине́йным отображе́нием векторного пространства LK над полем K в векторное пространство MK (лине́йным опера́тором из LK в MK) над тем же полем K называется отображение
![]() ,
,
удовлетворяющее условию линейности f(x + y) = f(x) + f(y), f(αx) = αf(x).
для
всех
![]() и
и
![]() .
.
Если определить операции сложения и умножения на скаляр из основного поля K как
множество
всех линейных отображений из LK
в MK
превращается в векторное пространство,
которое обычно обозначается как
![]()
Линейный функционал — линейный оператор, для которого M = K:

Эндоморфизм — линейный оператор, для которого L = M:

Тождественный оператор — оператор , отображающий каждый элемент пространства в себя.
Нулевой оператор — оператор, переводящий каждый элемент LK в нулевой элемент MK.
Проектор - оператор сопоставляющий каждому x его проекцию на подпространство.
Сопряжённый оператор к оператору
 —
оператор A
*
на V
*
, заданный соотношением (A
*
f,x):
= (f,Ax).
—
оператор A
*
на V
*
, заданный соотношением (A
*
f,x):
= (f,Ax).Самосопряжённый оператор — оператор, совпадающий со своим сопряжённым оператором. Иногда такие операторы называют гипермаксимальными эрмитовыми.
Эрмитов (или симметрический) оператор — такой оператор A, что (Ax,y) = (x,Ay) для всех пар x,y из области определения A. Для всюду определённых операторов совпадает с самосопряжённым.
Положительно определённый оператор. Пусть LK,MK - гильбертовы пространства. Тогда линейный оператор называется положительным, если
 .
.
Линейное
преобразование переменных
x1,
x2,
..., xn
— замена этих переменных на новые x"1,
x’2,
..., x"n,
через которые первоначальные переменные
выражаются линейно, т. е. по формулам:
x1
= a11x’1
+ a12x’2
+ ... +
annx’n
+ b1,
x2
= a21x’1
+ a22x’2
+ ... + a2nx’n
+ b2,
...
xn
= an1x’1
+ an2x’2
+ ... + annx’n
+ bn,
здесь
aij
и
bi
(i,
j
= 1,2, ..., n)
— произвольные
числовые
коэффициенты.
Если
b1,
b2,...,
bn
все равны нулю, то Линейное
преобразование
переменных называют однородным.
Простейшим
примером Линейное
преобразование
переменных могут служить формулы
преобразования прямоугольных координат
на плоскости
х
= x" cos a
- y" sin a
+ a,
у
= x" sin a
+ y" cos a
+ b.
Если
определитель
D
= ½aij
½,
составленный из коэффициентов при
переменных, не равен нулю, то можно и
новые переменные x"1,
x"2,
..., x"n
линейно выразить через старые. Например,
для
формул
преобразования
прямоугольных
координат
![]() x’
=x cos a
+ ysin a
+ a1
y’
= -x sin a
+ cos a
+ b1
где
a1
=
- a cos a
- b sin a,
b2
=
a sin a
- b cos (.
Другими
примерами Линейное
преобразование
переменных могут служить преобразования
аффинных и однородных проективных
координат, замена переменных при
преобразовании квадратичных форм и т.
п.
Линейное
преобразование
векторов (или Линейное
преобразование
векторного
пространства)
называют закон, по которому вектору х
из n-мерного
пространства ставят в соответствие
новый вектор x",
координаты которого линейно и однородно
выражаются через координаты вектора
х:
x’1
= a11x1
+ a12x2
+ ... +a1nxn
x’2
= a21x1
+ a22x2
+ ... +a2nxn
x’
=x cos a
+ ysin a
+ a1
y’
= -x sin a
+ cos a
+ b1
где
a1
=
- a cos a
- b sin a,
b2
=
a sin a
- b cos (.
Другими
примерами Линейное
преобразование
переменных могут служить преобразования
аффинных и однородных проективных
координат, замена переменных при
преобразовании квадратичных форм и т.
п.
Линейное
преобразование
векторов (или Линейное
преобразование
векторного
пространства)
называют закон, по которому вектору х
из n-мерного
пространства ставят в соответствие
новый вектор x",
координаты которого линейно и однородно
выражаются через координаты вектора
х:
x’1
= a11x1
+ a12x2
+ ... +a1nxn
x’2
= a21x1
+ a22x2
+ ... +a2nxn
...
x’n
= an1x1
+ an2x2
+ ... +annxn,
или
коротко
x"
= Ax.
Например,
операция проектирования на одну из
координатных плоскостей (пусть на
плоскость хОу) будет Линейное
преобразование
трёхмерного векторного пространства:
каждому вектору а
с координатами х,
у, z
сопоставляется новый вектор b,
координаты x",
y"., z"
которого выражаются через х,
у, z
следующим образом : x"
= х, y" = у,
z"
=
0. Пример Линейное
преобразование
плоскости — поворот её на угол a вокруг
начала координат. Матрицу
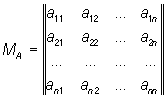 ,
составленную
из коэффициентов Линейное
преобразование
А,
называют его матрицей. Матрицами
приведённых выше Линейное
преобразование
проектирования и поворота будут
соответственно
,
составленную
из коэффициентов Линейное
преобразование
А,
называют его матрицей. Матрицами
приведённых выше Линейное
преобразование
проектирования и поворота будут
соответственно
 и
и
![]() .
Линейное
преобразование
векторного пространства можно определить
(как обычно поступают) без использования
системы координат: соответствие х®у
= Ax
называют
Линейное
преобразование,
если выполняются условия А(х
+ у)
= Ax + Ау
и
A(ax)
= aА(х)
для любых векторов х
и у
и любого числа a. В разных системах
координат одному и тому же Линейное
преобразование
будут соответствовать разные матрицы
и, следовательно, разные формулы для
преобразования координат.
К
Линейное
преобразование
относится, в частности, нулевое Линейное
преобразование
О, переводящее все векторы в 0 (нулевой
вектор) : Ox
= 0
и единичное Линейное
преобразование
Е, оставляющее все векторы без изменения:
Ex
= х;
этим Л. и. в любой системе координат
соответствуют нулевая и единичная
матрицы.
Для
Линейное
преобразование
векторного пространства естественным
образом определяются операции сложения
и умножения: суммой двух Линейное
преобразование
А и В называют Линейное
преобразование
С, переводящее любой вектор х
в вектор Cx
= Ax + Вх;
произведением Линейное
преобразование
А и В называют результат их последовательного
применения: С
= AB,
если Cx
= А(Вх).
В
силу этих определений совокупность
всех Линейное
преобразование
векторного пространства образует
кольцо.
Матрица суммы (произведения) Линейное
преобразование
равна сумме (произведению) матриц
Линейное
преобразование
слагаемых (сомножителей); при этом
существен порядок множителей, так как
произведение Л. и., как и матриц, не
обладает свойством коммутативности.
Линейное
преобразование
можно также умножать на числа: если
Линейное
преобразование
А
переводит вектор х
в вектор у
= Ax,
то aА
переводит
х
в aу.
Примеры операций над Линейное
преобразование:
1) Пусть А
и В
означают операции проектирования па
оси Ox и Оу в трёхмерном пространстве; А
+ В
будет проектированием на плоскость
хОу, а
AB
= 0. 2) А
и В
— повороты плоскости вокруг начала
координат на углы j и
.
Линейное
преобразование
векторного пространства можно определить
(как обычно поступают) без использования
системы координат: соответствие х®у
= Ax
называют
Линейное
преобразование,
если выполняются условия А(х
+ у)
= Ax + Ау
и
A(ax)
= aА(х)
для любых векторов х
и у
и любого числа a. В разных системах
координат одному и тому же Линейное
преобразование
будут соответствовать разные матрицы
и, следовательно, разные формулы для
преобразования координат.
К
Линейное
преобразование
относится, в частности, нулевое Линейное
преобразование
О, переводящее все векторы в 0 (нулевой
вектор) : Ox
= 0
и единичное Линейное
преобразование
Е, оставляющее все векторы без изменения:
Ex
= х;
этим Л. и. в любой системе координат
соответствуют нулевая и единичная
матрицы.
Для
Линейное
преобразование
векторного пространства естественным
образом определяются операции сложения
и умножения: суммой двух Линейное
преобразование
А и В называют Линейное
преобразование
С, переводящее любой вектор х
в вектор Cx
= Ax + Вх;
произведением Линейное
преобразование
А и В называют результат их последовательного
применения: С
= AB,
если Cx
= А(Вх).
В
силу этих определений совокупность
всех Линейное
преобразование
векторного пространства образует
кольцо.
Матрица суммы (произведения) Линейное
преобразование
равна сумме (произведению) матриц
Линейное
преобразование
слагаемых (сомножителей); при этом
существен порядок множителей, так как
произведение Л. и., как и матриц, не
обладает свойством коммутативности.
Линейное
преобразование
можно также умножать на числа: если
Линейное
преобразование
А
переводит вектор х
в вектор у
= Ax,
то aА
переводит
х
в aу.
Примеры операций над Линейное
преобразование:
1) Пусть А
и В
означают операции проектирования па
оси Ox и Оу в трёхмерном пространстве; А
+ В
будет проектированием на плоскость
хОу, а
AB
= 0. 2) А
и В
— повороты плоскости вокруг начала
координат на углы j и
![]() ;
AB будет поворотом на угол j +
.
3) Произведение единичного Линейное
преобразование
Е на число a будет преобразованием
подобия с коэффициентом растяжения
(или сжатия) a.
Линейное
преобразование
В
называют обратным к Линейное
преобразование
А
(и обозначают А-1),
если BA
= Е
(или AB
= Е).
Если Линейное
преобразование
А
переводило вектор х в вектор у, то
Линейное
преобразование
А-1
переводит у обратно в х. Линейное
преобразование,
обладающее обратным, называют
невырожденным; такие Линейное
преобразование
характеризуются также тем, что определитель
их матрицы не равен нулю. Некоторые
классы Линейное
преобразование
заслуживают особого упоминания.
Обобщением поворотов двумерных и
трёхмерных евклидовых пространств
являются ортогональные (или унитарные
— в комплексных пространствах) Линейное
преобразование
Ортогональные Линейное
преобразование
не изменяют длин векторов (а следовательно,
и углов между ними). Матрицы этих Линейное
преобразование
в ортонормированной системе координат
также называются ортогональными
(унитарными): произведение ортогональной
матрицы на её транспонированную даёт
единичную матрицу: åkaikajk
= åkakiakj
= 0 при i ¹ j, åka2ik
= åka2ki
= 1 (в комплексном пространстве åkaik
;
AB будет поворотом на угол j +
.
3) Произведение единичного Линейное
преобразование
Е на число a будет преобразованием
подобия с коэффициентом растяжения
(или сжатия) a.
Линейное
преобразование
В
называют обратным к Линейное
преобразование
А
(и обозначают А-1),
если BA
= Е
(или AB
= Е).
Если Линейное
преобразование
А
переводило вектор х в вектор у, то
Линейное
преобразование
А-1
переводит у обратно в х. Линейное
преобразование,
обладающее обратным, называют
невырожденным; такие Линейное
преобразование
характеризуются также тем, что определитель
их матрицы не равен нулю. Некоторые
классы Линейное
преобразование
заслуживают особого упоминания.
Обобщением поворотов двумерных и
трёхмерных евклидовых пространств
являются ортогональные (или унитарные
— в комплексных пространствах) Линейное
преобразование
Ортогональные Линейное
преобразование
не изменяют длин векторов (а следовательно,
и углов между ними). Матрицы этих Линейное
преобразование
в ортонормированной системе координат
также называются ортогональными
(унитарными): произведение ортогональной
матрицы на её транспонированную даёт
единичную матрицу: åkaikajk
= åkakiakj
= 0 при i ¹ j, åka2ik
= åka2ki
= 1 (в комплексном пространстве åkaik![]() jk
= åkaki
kj
= 0, åk|ajk|2
= åk|aki|2
= 1). Симметрическим (эрмитовым, или
самосопряжённым, — в комплексном
пространстве) Линейное
преобразование
называют такое Линейное
преобразование,
матрица которого симметрическая: aij
= aji
(или (aij
=
ij).
Симметрические Линейное
преобразование
осуществляют растяжение пространства
с разными коэффициентами по неск. взаимно
ортогональным направлениям. С
симметрическими Линейное
преобразование
связана теория квадратичных форм (или
эрмитовых форм в комплексном
пространстве).
Приведённое
выше определение Линейное
преобразование
в векторном пространстве, не использующее
координатную систему, без всяких
изменений распространяется и на
бесконечномерные (в частности,
функциональные) пространства. Линейное
преобразование
в бесконечномерных пространствах
принято называть линейными
операторами.
jk
= åkaki
kj
= 0, åk|ajk|2
= åk|aki|2
= 1). Симметрическим (эрмитовым, или
самосопряжённым, — в комплексном
пространстве) Линейное
преобразование
называют такое Линейное
преобразование,
матрица которого симметрическая: aij
= aji
(или (aij
=
ij).
Симметрические Линейное
преобразование
осуществляют растяжение пространства
с разными коэффициентами по неск. взаимно
ортогональным направлениям. С
симметрическими Линейное
преобразование
связана теория квадратичных форм (или
эрмитовых форм в комплексном
пространстве).
Приведённое
выше определение Линейное
преобразование
в векторном пространстве, не использующее
координатную систему, без всяких
изменений распространяется и на
бесконечномерные (в частности,
функциональные) пространства. Линейное
преобразование
в бесконечномерных пространствах
принято называть линейными
операторами.