

1.2. Векторный способ задания движения, определение скорости точки
Положение точки в пространстве однозначно определяется заданием радиуса-вектора, проведенного из некоторого неподвижного центра О в данную точку М (рис. 2.2). Для определения движения точки должна быть задана вектор-функция аргумента t
![]() .
.
При векторном способе задания движения положение движущейся точки в каждый момент времени (рис. 2.3) определяется радиусом-вектором. Вектор скорости точки в данный момент равен производной от радиуса-вектора точки по времени.
![]() .
.
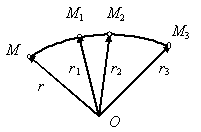
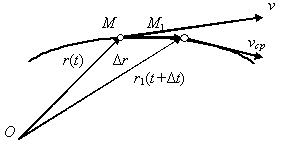
Рис. 2.2 Рис. 2.3
Вектор скорости точки направлен по касательной к траектории в сторону движения точки. При движении точки по криволинейной траектории направление вектора скорости непрерывно изменяется (рис. 2.4).

Рис. 2.4
1.3. Координатный способ задания движения точки, определение скорости точки
Положение точки М в системе отсчета Охуz определяется тремя декартовыми координатами точки х, у, z (рис. 2.5). При движении точки М ее координаты изменяются с течением времени. Следовательно, координаты х, у, z движущейся точки М являются функциями времени t:
![]() .
.
Эти уравнения называются уравнениями движения точки в декартовых координатах.
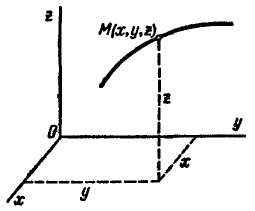
Рис. 2.5
Движение точки М в одной плоскости определяется двумя уравнениями движения (рис. 2.6, а):
![]() .
.
а) б)
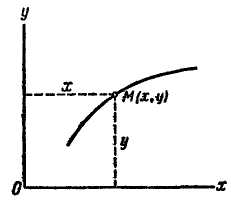
Рис. 2.6
Прямолинейное движение точки М определяется одним уравнением движения (рис. 2.6, б)
![]() .
.
Уравнения движения, определяющие координаты точки в любой момент времени, можно рассматривать как параметрические уравнения траектории точки, а время – как независимый переменный параметр. При исключении параметра t из уравнений движения получаются уравнения траектории точки в координатной форме. Пусть уравнения движения точки М имеют вид
![]()
Решив
первое уравнение относительно t,
получим
![]()
Подставив полученное для t выражение в два других уравнения, найдем уравнения траектории точки в координатной форме:
![]()
Два уравнения с тремя координатами определяют линию в пространстве, т.е. траекторию точки. Пусть движение точки М в плоскости задано уравнениями
![]()
Исключив параметр t, получим уравнение траектории точки в координатной форме:
![]()
Помимо декартовых координат для определения положения точки на плоскости и в пространстве применяют и другие системы координат (полярные, цилиндрические, сферические и др.).
Определим модуль и направление скорости точки по уравнениям ее движения в декартовых координатах (рис. 2.7).
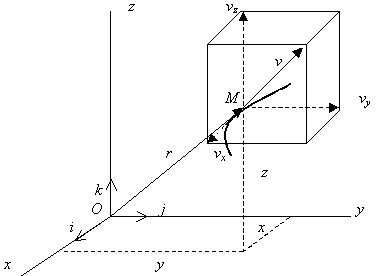
Рис. 2.7
![]() .
.
Проекции скорости точки на неподвижные оси декартовых координат равны первым производным от соответствующих координат точки по времени.
Вычислив проекции скорости на оси декартовых координат, можно определить модуль и направление скорости точки по следующим формулам:
![]() .
.
Движение точки в плоскости хОу задается двумя уравнениями движения. Модуль и направление скорости точки в этом случае определяются так:
![]() .
.
Прямолинейное движение точки задается одним уравнением. В этом случае модуль скорости точки равен абсолютной величине проекции скорости на ось х:
![]() .
.
При
![]() точка движется по направлению оси х,
при
точка движется по направлению оси х,
при
![]() - противоположно
направлению оси.
- противоположно
направлению оси.
Задача 2.1. Кривошип ON длиною а вращается вокруг оси, перпендикулярной к плоскости рисунка и проходящей через точку О. Угол φ между неподвижной осью Ох и кривошипом изменяется пропорционально времени: φ=kt. Составить уравнения движения точки N в декартовой системе координат. Найти уравнения ее траектории (рис. 2.8).
Решение. Для составления уравнений движения точки N надо выразить ее координаты как функции времени. Из рисунка находим координаты x,y точки N:
![]() ;
(2.1)
;
(2.1)
![]() .
(2.2)
.
(2.2)
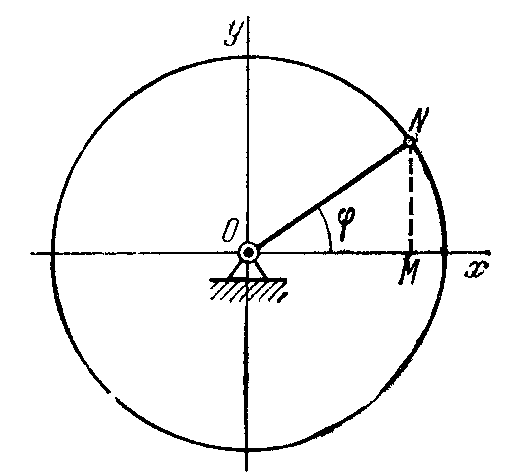
Рис. 2.8
Это и будут искомые уравнения движения точки N.
Чтобы найти уравнение траектории точки в явной форме, надо исключить из уравнений движения время. Для этого возведем каждое уравнение движения (2.1 и 2.2) в квадрат
![]() ;
(2.3)
;
(2.3)
![]() (2.4)
(2.4)
и сложим уравнения (2.3) и (2.4):
![]() .
.
Это уравнение траектории точки N - уравнение окружности радиусом а с центром в начале координат.