

![]() рад/с.
рад/с.
Подставляя в (а), получим:
![]() м/с.
м/с.
Вектор переносной
скорости
![]() изобразим перпендикулярно радиусу
переносного вращения
изобразим перпендикулярно радиусу
переносного вращения
![]() в сторону
в сторону
![]() (рис. 2.108).
(рис. 2.108).
Для определения
направления абсолютной скорости
![]() сложим векторы составляющих скоростей
по правилу параллелограмма, а модуль
определим по формуле
сложим векторы составляющих скоростей
по правилу параллелограмма, а модуль
определим по формуле
![]()
3. Определение
абсолютного ускорения
![]() .
Так как переносное движение поступательное,
то воспользуемся теоремой Кориолиса
.
Так как переносное движение поступательное,
то воспользуемся теоремой Кориолиса
![]() .
.
Относительное
ускорение
![]() можно определить по зависимости
можно определить по зависимости
![]() ,
,
где
![]() м/с2.
м/с2.
На рис. 2.109 изобразим
![]() ,
направив вектор от точки М
к центру окружности.
,
направив вектор от точки М
к центру окружности.
Переносное
ускорение
![]() определится по формуле
определится по формуле
![]() ,
,
где
![]()
![]() м/с2.
м/с2.
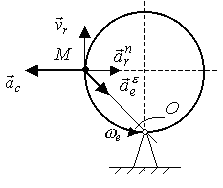
Рис. 2.109
Вектор
![]() имеет начало в точке М
и направлен вдоль радиуса переносного
вращения ОМ
к центру О.
имеет начало в точке М
и направлен вдоль радиуса переносного
вращения ОМ
к центру О.
Ускорение Кориолиса равно
![]() .
.
Вектор угловой
скорости
направлен вдоль оси вращения,т.е. вдоль
прямой, перпендикулярной плоскости
чертежа, а вектор относительной скорости
![]() лежит в плоскости чертежа, т.е. в любой
момент времени угол между
и
равен
лежит в плоскости чертежа, т.е. в любой
момент времени угол между
и
равен
![]() ,
а
,
а
![]() .
Поэтому
.
Поэтому
![]() м/с2.
м/с2.
Для показа
![]() воспользуемся правилом Жуковского. Так
как
уже находится в плоскости, перпендикулярной
оси переносного вращения, повернем его
на 90о
в сторону
,
т.е. против хода часовой стрелки.
воспользуемся правилом Жуковского. Так
как
уже находится в плоскости, перпендикулярной
оси переносного вращения, повернем его
на 90о
в сторону
,
т.е. против хода часовой стрелки.
Модуль абсолютного ускорения определим по методу проекций:
![]() ;
;
![]() м/с2,
м/с2,
отсюда
![]() м/с2.
м/с2.
7.5. Сложение вращений твердого тела вокруг двух параллельных осей
Пусть твердое тело
вращается вокруг оси Оz
(рис. 2.110) с относительной угловой
скоростью
![]() (относительное движение по отношению
к осям Oxyz),
а система осей Oxyz
вращается вокруг оси O1z1
параллельной
оси Оz
с переносной
угловой скоростью
(переносное движение по отношению к
осям O1x1y1z1).
(относительное движение по отношению
к осям Oxyz),
а система осей Oxyz
вращается вокруг оси O1z1
параллельной
оси Оz
с переносной
угловой скоростью
(переносное движение по отношению к
осям O1x1y1z1).
Если провести плоскость Q перпендикулярную осям вращения Оz и O1z1, то в сечении твердого тела получим плоскую фигуру, которая в относительном и переносном движениях будет оставаться в плоскости сечения. Это означает, что и в абсолютном движении плоская фигура остается в плоскости сечения.
Следовательно, результирующим (абсолютным) движением твердого тела будет плоское и характеризуется движением плоской фигуры в ее плоскости. Рассмотрим три случая.
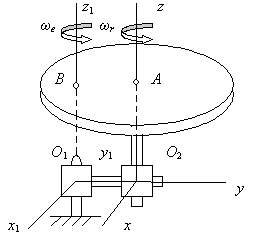
Рис. 2.110
С л у ч а й 1. Переносное и относительное вращения направлены в одну сторону.
Изобразим сечение
твердого тела плоскостью Q,
перпендикулярной осям Oz
и
![]() .
Следы осей в сечении обозначим А
и В
(рис. 2.111).
.
Следы осей в сечении обозначим А
и В
(рис. 2.111).
Точка А плоской фигуры в относительном вращении имеет скорость равную 0, в переносном
![]() .
.
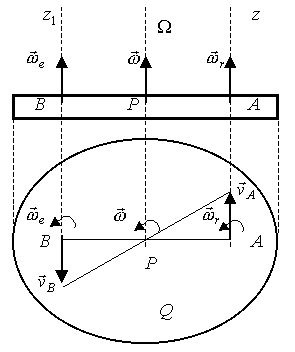
Рис. 2.111
Точка В плоской фигуры в переносном вращении имеет скорость равную 0, а в относительном
![]() .
.
Векторы
![]() и
и
![]() параллельны.
параллельны.
Мгновенный центр скоростей Р найдем на пересечении отрезков, соединяющих точки А и В и концы векторов скоростей этих точек.
Мгновенная ось
абсолютного вращения
![]() проходит через мгновенный центр
скоростей Р.
проходит через мгновенный центр
скоростей Р.
Таким образом, мгновенная ось абсолютного вращения плоской фигуры лежит в плоскости, проходящей через оси переносного и относительного вращений, и, будучи параллельной им, делит расстояние между этими осями на части, обратно пропорциональные угловым скоростям.
![]() .
.
Итак, если тело участвует одновременно в двух направленных в одну сторону вращениях вокруг параллельных осей, то результирующим (абсолютным) движением будет вращение вокруг мгновенной оси, параллельной данным, с модулем абсолютной угловой скорости, равным сумме модулей угловых скоростей составляющих вращений.
![]() .
.
С течением времени мгновенная ось меняет свое положение, описывая цилиндрическую поверхность. Положение мгновенной оси определяется соотношением
![]() ,
,
где ВР и АР – расстояния от данных осей вращения до мгновенной; АВ – расстояние между данными осями.
Задача 2.24.
Кривошип О1О
(рис. 2.112) вращается вокруг неподвижной
оси Oz
против хода часовой стрелки с угловой
скоростью
и заставляет подвижную шестерню 2 радиуса
r2
катиться по неподвижной шестерне 1
радиуса r1.
Определить абсолютную
![]() и относительную
угловые скорости шестерни 2.
и относительную
угловые скорости шестерни 2.
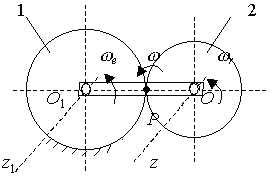
Рис. 2.112
Решение. Рассмотрим простейшую цилиндрическую планетарную передачу. Мгновенный центр скоростей шестерни 2 находится в точке касания шестерен. Для шестерни 2 вращение кривошипа является переносным, угловая скорость - переносной, а ось Oz1 – осью переносного вращения. Ось относительного вращения шестерни 2 – Oz, мгновенная ось абсолютного вращения проходит через точку Р, перпендикулярную плоскости движения.
Для определения относительной скорости запишем
![]() ,
,
тогда
![]() .
.
Абсолютная угловая скорость
![]() .
.
С л у ч а й II. Переносное и относительное вращения направлены в разные стороны, а модули их угловых скоростей не равны.
Изобразим сечение
твердого тела плоскостью, перпендикулярной
осям вращения Oz
и
.
Скорость
направим в противоположную сторону и
для определенности будем полагать
![]() (рис. 2.113).
(рис. 2.113).
Выразим скорости точек А и В через формулы
![]()
и покажем на рисунке.
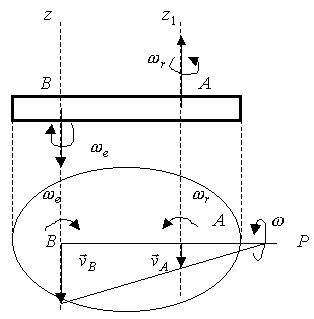
Рис. 2.113
Мгновенный центр скоростей Р находится на пересечении продолжения отрезка АВ и отрезка, соединяющего концы векторов скоростей и . Через точку Р пройдет мгновенная ось вращения, которая будет параллельна данным осям. Абсолютная угловая скорость равна
![]() .
.
Таким образом, если твердое тело участвует в двух направленных в разные стороны вращениях вокруг параллельных осей, то мгновенная ось абсолютного вращения плоской фигуры параллельна осям переносного и относительного вращений и лежит в плоскости, проходящей через эти оси, со стороны той оси, угловая скорость вращения вокруг которой больше.
С течением времени мгновенная ось вращения меняет свое положение, описывая цилиндрическую поверхность. Положение оси определяется соотношениями
.
Задача 2.25.
Кривошип О1О
вращается вокруг неподвижной оси О1z1
против хода часовой стрелки (рис. 2.114) с
угловой скоростью
и заставляет подвижную шестерню 2 радиуса
r2
катиться по неподвижной шестерне 1
радиуса r1.
Определить абсолютную
![]() и относительную скорости шестерни 2.
и относительную скорости шестерни 2.
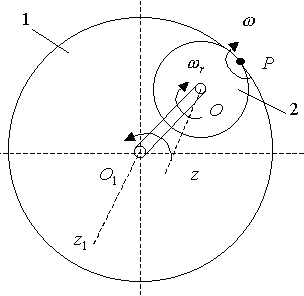
Рис. 2.114
Решение. Мгновенный центр скоростей шестерни 2 находится в точке касания шестерен, т.е. на продолжении отрезка, соединяющего точки О и О1. запишем соотношение
,
откуда
.
Известно, что при
внутреннем зацеплении угловые скорости
шестерен направлены в разные стороны,
значит
направлена по ходу часовой стрелки,
т.е.
![]() .
.
Для определения абсолютной угловой скорости запишем равенство
![]() .
.
Знак минус в ответе означает, что абсолютная угловая скорость направлена в сторону, противоположную .
Задача
2.26. Определить
угловые скорости колес цилиндрического
редуктора (рис. 2.115). Исходные данные:
радиусы колес
![]()
![]() ,
,![]() ,
,![]() см;
угловые скорости
см;
угловые скорости
![]() об/мин,
об/мин,
![]() об/мин.
об/мин.
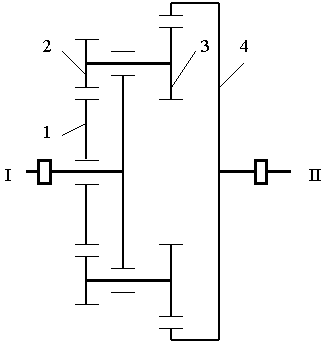
Рис. 2.115
Решение. 1) Решение задачи способом Виллиса. Этот способ позволяет определять угловые скорости звеньев механизма, участвующих в двух вращениях: переносном и относительном.
Колеса редуктора участвуют: в относительном вращении (по отношению к водилу) вокруг собственной оси; в переносном вращении вместе с водилом вокруг его оси.
Переносной угловой скоростью для каждого колеса является угловая скорость водила . Относительные угловые скорости колес определяются как разности абсолютных и переносных угловых скоростей:
![]()
![]()
……………….
![]() .
.
Эти относительные скорости являются угловыми скоростями всех колес при мысленно остановленном водиле. В этом случае между относительными угловыми скоростями имеются такие же соотношения, как в зубчатых передачах с неподвижными осями вращений. Следовательно,
![]() ,
,
где т – число внешних зацеплений между колесами; i – передаточное число от колеса 1 к колесу I в относительном движении (при остановленном водиле).
Это соотношение носит название формулы Виллиса. В эту формулу входят алгебраические значения угловых скоростей. Знак «+» примем соответствующим вращении против часовой стрелки, а «–» – вращению по часовой стрелке. В формулу Виллиса вместо можно подставить п об/мин.
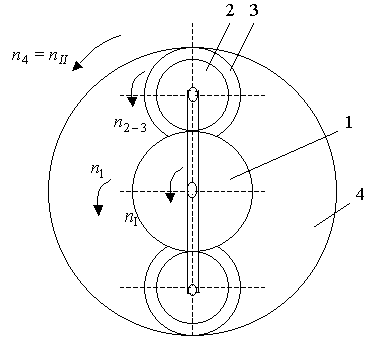
Применим формулу
Виллиса к решению рассматриваемой
задачи (рис. 2.116, а).
Так как колеса 1 и 2 находятся во внешнем
зацеплении, а колеса 3 и 4 – во внутреннем
и угловая скорость вращения водила
равна
![]() ,
то
,
то
![]() ,
,
откуда
![]() .
.
а)
б)
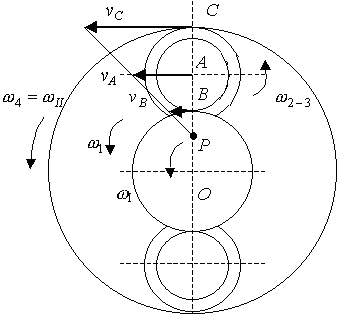
Рис. 2.116
Подставляя сюда числовые значения, находим
![]() об/мин.
об/мин.
Знак «+» в ответе указывает, что вал II вращается в направлении, противоположном вращению часовой стрелки.
Угловую скорость
![]() шестерен 2 и 3 (сателлитов) определяем
из следующего соотношения:
шестерен 2 и 3 (сателлитов) определяем
из следующего соотношения:
![]() ,
,
откуда
![]() .
.
Подставляя сюда числовые значения, находим:
![]() об/мин.
об/мин.
2) Решение задачи способом мгновенных центров скоростей. По угловым скоростям ведущих звеньев найдем скорость точки А оси спаренных шестерен и скорость точки В касания колес 1 и 2.
![]() ;
;
![]() ;
;
![]() см/с;
см/с;
![]() см/с.
см/с.
Отложив векторы и (рис. 2.116, б), найдем мгновенный центр скоростей шестерен 2 и 3:
![]() .
.
Так как
![]() см,
см,
то
![]() .
.
Затем определяем скорость точки С:
![]() см/с.
см/с.
По скорости точки А или В находим угловые скорости шестерен 2 и 3:
![]() ;
;
 об/мин.
об/мин.
По скорости точки С находим угловую скорость колеса 4:
![]()
 об/мин;
об/мин;
![]() об/мин.
об/мин.
С л у ч а й III. Переносное и относительное вращения направлены в разные стороны, а модули их угловых скоростей равны (пара вращений).
Изобразим сечение тела (рис. 2.117), совершающего сложное движение. Скорости точек А и В сечения будут равны:
,
но так как
![]() ,
то
,
то
![]() .
.
Это означает, что мгновенный центр скоростей находится в бесконечности, и все точки тела в данный момент времени имеют геометрически равные скорости
![]() .
.
Результирующим
движением в этом случае будет поступательное
движение со скоростью равной
![]() и направленной перпендикулярно плоскости,
соединяющей
и
.
Такие совокупности вращений называются
парой вращений, а векторы
и
образуют пару угловых скоростей.
и направленной перпендикулярно плоскости,
соединяющей
и
.
Такие совокупности вращений называются
парой вращений, а векторы
и
образуют пару угловых скоростей.
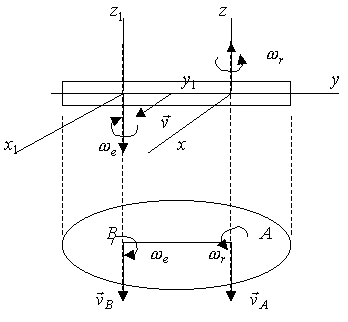
Рис. 2.117
Пара вращений
эквивалентна поступательному движению
со скоростью
![]() ,
равной моменту пары угловых скоростей
этих вращений.
,
равной моменту пары угловых скоростей
этих вращений.
Задача 2.27.
Шестерня 4 планетарного зубчатого
механизма, изображенного на рис. 2.118, а,
свободно укреплена на конце рукоятки
ОА,
которая вращается вокруг оси О
неподвижной шестерни 1 с постоянной
угловой скоростью
![]() в сторону, обратную вращению часовой
стрелки. На рукоятке ОА
лежит ось двойной шестерни 2-3, находящейся
в зацеплении с шестернями 1 и 4; числа
зубьев шестерен соответственно равны
в сторону, обратную вращению часовой
стрелки. На рукоятке ОА
лежит ось двойной шестерни 2-3, находящейся
в зацеплении с шестернями 1 и 4; числа
зубьев шестерен соответственно равны
![]() .
Определить угловую скорости шестерни
4.
.
Определить угловую скорости шестерни
4.
Решение. Примем вращение рукоятки ОА вокруг оси О за переносное вращение и найдем угловые скорости относительных вращений шестерен по отношению к рукоятке (рис. 2.118, 6). Относительное вращение неподвижной шестерни 1 происходит вокруг оси О навстречу вращению рукоятки с угловой скоростью, модуль которой равен модулю угловой скорости рукоятки
![]() .
.
Направления относительных вращений двойной шестерни 2-3 и шестерни 4 показаны на рис. 2.118, б.
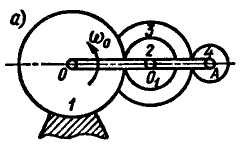
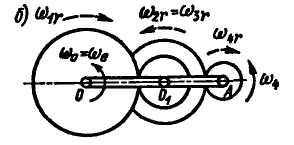
Рис. 2.118
Модули относительных угловых скоростей шестерен обратно пропорциональны числам их зубьев, т. е.
![]() ;
(а)
;
(а)
![]() .
(б)
.
(б)
Шестерни 2 и 3
связаны между собой жестко, а поэтому
![]() .
.
Перемножая (а) и (б), получаем:
![]() ,
,
откуда
![]() .
.
Так как переносное
и относительное вращения шестерни 4
направлены противоположно, то, полагая
![]() ,
найдем
,
найдем
![]() ,
как разность модулей ее переносной и
относительной угловых скоростей:
,
как разность модулей ее переносной и
относительной угловых скоростей:
![]() ,
,
откуда
![]() .
.
На рис. 2.118, б абсолютное вращение шестерни 4 направлено в сторону переносного вращения, так как положено , т.е.
![]() или
или
![]() .
.
В случае
![]() направление абсолютного вращения
шестерни 4 противоположно указанному.
направление абсолютного вращения
шестерни 4 противоположно указанному.