

Модуль вращательного ускорения точки твердого тела равен произведению расстояния от точки до оси вращения на модуль углового ускорения тела.
Вектор
вращательного ускорения
![]() направлен по касательной к окружности,
описываемой точкой, в сторону углового
ускорения.
направлен по касательной к окружности,
описываемой точкой, в сторону углового
ускорения.
Модуль центростремительного ускорения точки твердого тела равен произведению расстояния от точки до оси вращения на квадрат угловой скорости тела
![]() (2.10)
(2.10)
Вектор
центростремительного ускорения точки
![]() направлен всегда от точки к центру
описываемой окружности, то есть
перпендикулярен
.
направлен всегда от точки к центру
описываемой окружности, то есть
перпендикулярен
.
Модуль полного ускорения точки
![]() (2.11)
(2.11)
Тангенс
угла β,
составленного ускорением
![]() с радиусом окружности СМ
с радиусом окружности СМ
![]()
Эта формула показывает, что угол, составленный ускорением точки вращающегося тела с отрезком, соединяющим точку с центром окружности, не зависит от положения точки в теле.
Из формул (2.9). (2.10) и (2.11) следует, что модули вращательных, центростремительных и полных ускорений точек вращающегося тела пропорциональны расстояниям от этих точек до оси вращения. Поэтому по ускорению какой-либо точки А вращающегося диска (рис. 2.30) можно определить графически ускорение любой другой точки В этого диска, лежащей на радиусе АС.
Скорость и ускорение точек вращающегося твердого тела могут быть определены в виде векторных произведений (рис. 2.31):
![]() ;
;
![]() ;
;
![]() .
.
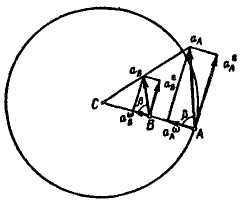
Рис. 2.30 Рис. 2.31
Задача 2.5. Груз А, подвешенный к нити АВ, намотанной на барабан, опускается равноускоренно из состояния покоя, приводя во вращение барабан. За первые 3 с барабан совершает 9 оборотов. Определить в конце 5-й секунды скорость и ускорение точки обода барабана, а также груза А, если диаметр барабана D = 30 см (рис. 2.32, а).
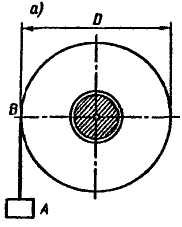
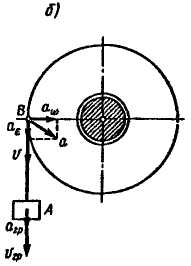
Рис. 2.32
Решение. Барабан вращается равноускоренно согласно уравнению
![]() .
.
Формула угловой скорости имеет вид:
![]() .
.
Для
того, чтобы начальное значение угла
поворота
![]() было равно нулю, необходимо неподвижную
полуплоскость поместить в начальном
положении подвижной полуплоскости,
вращающейся с барабаном. Выполним это
и получим
было равно нулю, необходимо неподвижную
полуплоскость поместить в начальном
положении подвижной полуплоскости,
вращающейся с барабаном. Выполним это
и получим
![]() .
.
При
вращении из состояния покоя начальная
угловая скорость барабана равна нулю
![]() .
При этих условиях формулы принимают
вид
.
При этих условиях формулы принимают
вид
![]() ;
(2.12)
;
(2.12)
![]() .
(2.13)
.
(2.13)
Так
как при t
= 3 с
![]() рад,
то из уравнения (2.12) определим угловое
ускорение
рад,
то из уравнения (2.12) определим угловое
ускорение
![]()
![]() .
.
Из уравнения (2.13) найдем угловую скорость барабана в конце 5-й секунды
![]() .
.
Определим в точке В обода барабана (рис. 2.32, б) модули вращательной скорости, вращательного и центростремительного ускорений в этот же момент времени по формулам:
![]()
![]() .
.
(модуль вращательного ускорения точки тела при равнопеременном вращении одинаков для всех моментов времени)
![]() .
.
Модуль полного ускорения точки обода барабана определяется по формуле
![]() .
.
Вследствие незначительной величины модуля вращательного ускорения по сравнению с модулем центростремительного ускорения полное ускорение приближенно равно центростремительному.
Скорость груза равна скорости точки обода барабана
![]() .
.
Ускорение груза (рис. 2.32, б) равно вращательному ускорению точки обода
![]() .
.
Задача
2.6.
По заданному уравнению прямолинейного
поступательного движения груза 1
![]() ,
см определить
скорость, а также вращательное,
центростремительное и полное ускорение
точки М
механизма в момент времени, когда путь,
пройденный грузом, равен s.
,
см определить
скорость, а также вращательное,
центростремительное и полное ускорение
точки М
механизма в момент времени, когда путь,
пройденный грузом, равен s.
![]() см;
см;
![]() см;
см;
![]() см;
см;
![]() см;
см;
![]() см (рис. 2.33).
см (рис. 2.33).
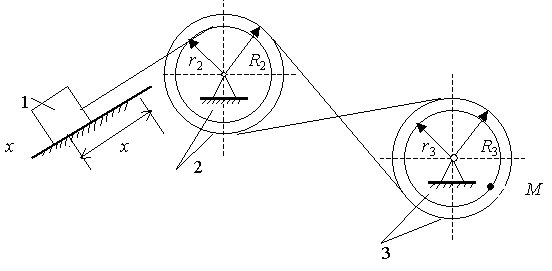
Рис. 2.33
Решение. Кинематический анализ. Механизм состоит из трех тел: груз 1 совершает поступательное движение, а колеса 2 и 3 вращаются вокруг неподвижных осей, перпендикулярных плоскости чертежа. Связи между телами идеальны. Определим момент времени t, когда путь s, пройденный грузом равен 50 см
![]() ,
,
откуда
![]() .
.
Скорость груза определим дифференцированием по времени уравнения движения
![]() .
.
Определение угловых параметров колес 2 и 3.
Угловая скорость колеса 2
![]() .
.
Угловые скорости колес 2 и 3, связанных гибкой передачей, обратно пропорциональны радиусам этих колес, то есть
![]() ,
,
откуда
![]() .
.
Угловое ускорение колеса 3
![]() .
.
Определение линейных параметров.
Скорость точки М колеса 3
![]()
и направлена перпендикулярно к радиусу в сторону вращения колеса 3.
Вращательное ускорение точки М
![]()
и имеет одинаковое со скоростью направление, так как вращение колес ускоренное (угловая скорость и угловое ускорение имеют одинаковые знаки).
Центростремительное ускорение точки М
![]()
и направлено по радиусу к центру колеса.
Полное ускорение
![]() .
.
Значения
всех определяемых величин для времени
![]() представлены в табл. 2.4, а направление
скоростей и ускорений точки М
показаны на рис. 2.34.
представлены в табл. 2.4, а направление
скоростей и ускорений точки М
показаны на рис. 2.34.
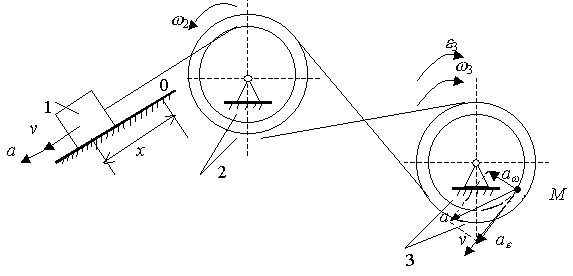

Рис. 2.34
Таблица 2.4
|
|
v, см/с |
У с к о р е н и е, см/с2 |
||
|
|
а |
|||
2,75 |
2,75 |
110 |
110 |
756,3 |
764,26 |
3.7. Передаточные механизмы, передаточное число
Передаточные механизмы предназначены для передачи вращения от одного вала, называемого ведущим, к другому, называемому ведомым. Если оси ведущего и ведомого валов параллельны или пересекаются, то вращение можно передать с помощью фрикционной или зубчатой передачи
(рис. 2.35-2.38).
Во фрикционной передаче вращение передается вследствие действия силы сцепления на поверхности соприкасающихся колес, в зубчатой передаче - от зацепления зубьев.
Отношение угловой скорости ведущего колеса к угловой скорости ведомого колеса называется передаточным числом
![]()
Передаточное число можно вычислить как обратное отношение радиусов колес
![]()
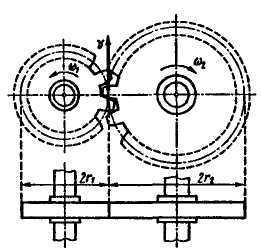

Рис. 2.35 Рис. 2.36
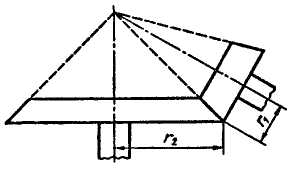
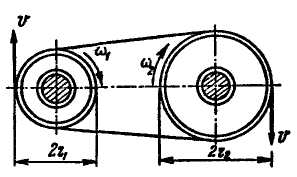
Рис. 2.37 Рис. 2.38
Так как числа зубьев пропорциональны длинам окружностей и, следовательно, радиусам, то передаточное число определяется и по числу зубьев
![]()
При внешнем зацеплении (рис. 2.35, 2.37) направление вращения ведущего и ведомого колес противоположное, а при внутреннем (рис. 2.36) - одинаковое.
Возможна передача на расстоянии с помощью гибкой связи (ремня, троса, цепи) (рис. 2.38). Taк как скорости всех точек ремня одинаковы и ремень не скользит по поверхности шкива, то к ременной передаче относятся те же соотношения
![]()
Применяются также серии колес с неподвижными осями вращения в виде последовательного ряда с паразитными колесами (рис. 2.39) и последовательного ряда с кратным зацеплением (рис. 2.40), называемые рядовыми соединениями колес.
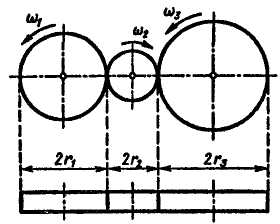
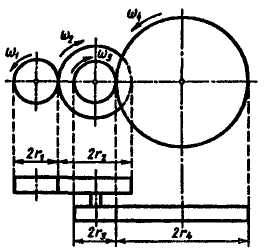
Рис. 2.39 Рис. 2.40
Определим передаточное число фрикционной передачи в виде рядового соединения с паразитными колесами:
для
колес
1-2
![]()
для
колес 2-3
![]()
Перемножаем левые и правые части, получаем
![]() .
.
Для зубчатых колес
![]()
Передаточное число рядового соединения с паразитными колесами равно отношению радиусов (чисел зубьев) ведомого и ведущего колес и не зависит от радиусов (чисел зубьев) паразитных колес.
Определим передаточное число рядового соединения с кратным зацеплением. Частное передаточное число для колес 1-2
![]() .
.
Частное передаточное число для колес 3-4
![]() .
.
Так
как колеса
2—3 соединены
жестко, т. е.
![]() ,
то общее передаточное число
,
то общее передаточное число
![]() равно произведению передаточных чисел:
равно произведению передаточных чисел:
![]() .
.
Для зубчатых колес
![]() .
.
Таким образом, общее передаточное число рядового соединения колес с кратным зацеплением равно произведению чисел зубьев ведомых колес, деленному на произведение чисел зубьев ведущих колес.
В рассмотренных выше передачах при равномерном вращении ведущего вала ведомый вал вращается тоже равномерно.
Для получения переменной угловой скорости ведомого вала применяются передачи, в которых расстояние от точки соприкасания колес до оси одного из валов или обоих валов изменяется.
Во фрикционной передаче, изображенной на рис. 2.41, колесо 1 перемещается вдоль его оси и отношение угловых скоростей зависит от переменного расстояния х
![]() .
.

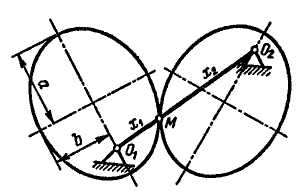
Рис. 2.41 Рис. 2.42
На рис. 2.42 изображены эллиптические колеса, оси вращения которых находятся в фокусах эллипсов. Отношение угловых скоростей зависит от переменных расстояний
![]()
![]()
где
![]() .
.
Задача 2.7. Редуктор скоростей, изображенный на рис. 2.43, а, б, обеспечивает вращение валов I и II, имеющих общую геометрическую ось, с различными угловыми скоростями. Определить частоту вращения вала II, соответствующую частоте вращения вала I n1= 800 мин-1, если числа зубьев шестерен соответственно: z1 = 12, z2 = 60, z3 = 20, z4 = 80.
Решение. Передаточное число редуктора равно отношению угловой скорости ведущего вала к угловой скорости ведомого:
![]()
При этом угловые скорости ведущего и ведомого валов равны угловым скоростям жестко соединенных с ними шестерен:
![]()
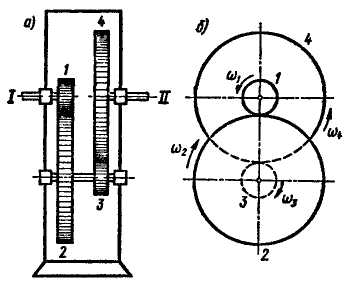
Рис. 2.43
Для получения зависимости между угловыми скоростями шестерен 1 и 4 следует определить передаточное число передачи, состоящей из двух пар колес (рис. 2.43, б), согласно формуле
![]()
Пользуясь частотами вращения, выраженными в мин-1, имеем
![]()
откуда
![]() мин-1.
мин-1.