

4.3. План скоростей
Зависимость между скоростями точек плоской фигуры позволяет определять скорости точек этой фигуры простым и наглядным построением, называемым планом скоростей.
План скоростей — это диаграмма, позволяющая графически определить скорости любой точки плоской фигуры. План скоростей может быть построен, если известна скорость точки А плоской фигуры и направление скорости другой точки В фигуры или скорость точки А плоской фигуры и мгновенная угловая скорость фигуры.
Пусть известна скорость точки А плоской фигуры и направление скорости точки В (рис. 2.52). Скорость точки С определим с помощью плана скоростей.

Рис. 2.52
Воспользуемся теоремой о скоростях точек плоской фигуры
![]() ,
,
где
![]() - скорость полюса;
- скорость полюса;
![]() - скорость точки В
во вращении вместе с плоской фигурой
вокруг полюса А.
- скорость точки В
во вращении вместе с плоской фигурой
вокруг полюса А.
Вектор
перпендикулярен отрезку АВ,
поэтому из произвольного
центра О
(рис. 2.53) в произвольно выбранном
масштабе сначала отложим вектор
![]() ,
затем через концы построенного вектора
проведем прямую перпендикулярную
отрезку АВ
(то есть параллельно вектору вращательной
скорости
).
Через центр О
проведем прямую, параллельную направлению
скорости точки В,
в пересечении двух проведенных прямых
находится точка В,
причем вектор
,
затем через концы построенного вектора
проведем прямую перпендикулярную
отрезку АВ
(то есть параллельно вектору вращательной
скорости
).
Через центр О
проведем прямую, параллельную направлению
скорости точки В,
в пересечении двух проведенных прямых
находится точка В,
причем вектор
![]() будет соответствовать скорости точки
В,
то есть
будет соответствовать скорости точки
В,
то есть
![]() .
.
Зная скорости двух точек А и В, найдем скорость третьей, исходя из того, что
![]() и
и
![]() .
.
Через точки а и b плана скоростей проведем прямые, перпендикулярные АС и ВС соответственно, точка пересечения которых и будет еще одной точкой плана скоростей. Вектор, соединяющий О и с, соответствует скорости точки C
![]() .
.
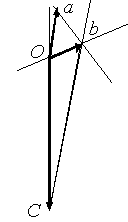
Рис. 2.53
Треугольник
abc
является
планом скоростей, точки а,
b,
с – вершинами,
векторы
![]() - лучами. Отрезки, соединяющие вершины
плана скоростей (ab,bc,ac),
соответствуют скоростям точек В
и С
при вращении фигуры вокруг соответствующих
полюсов (
- лучами. Отрезки, соединяющие вершины
плана скоростей (ab,bc,ac),
соответствуют скоростям точек В
и С
при вращении фигуры вокруг соответствующих
полюсов (![]()
![]()
![]() ).
Легко показать, что
).
Легко показать, что
![]() подобен
подобен
![]() ,
поворот
происходит в направлении угловой
скорости плоской фигуры.
,
поворот
происходит в направлении угловой
скорости плоской фигуры.
Угловую скорость получим из выражения
![]() или
или
![]() .
.
Приняв во внимание масштаб построения, можно записать:
![]() .
.
Задача
2.10. Определить
скорость точки D
механизма, изображенного на рис. 2.54, а,
путем построения плана скоростей, если
известно, что угловая скорость стержня
![]() равна
равна
![]() .
.
Решение.
Скорость точки А
будет равна по модулю
![]() и направлена, как показано на рисунке.
Направление скорости точки В
перпендикулярно стержню
и направлена, как показано на рисунке.
Направление скорости точки В
перпендикулярно стержню
![]() .
Для определения скорости точки D
мы сначала должны найти скорость точки
С,
принадлежащей как стержню АС,
так и стержню
CD.
.
Для определения скорости точки D
мы сначала должны найти скорость точки
С,
принадлежащей как стержню АС,
так и стержню
CD.
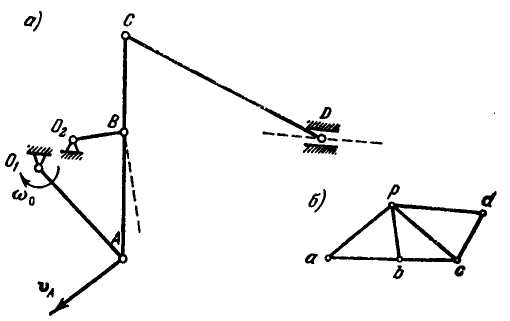
Рис. 2.54
Отложим
от полюса р
вектор
![]() ,
из точки а
проведем
прямую, перпендикулярную стержню АВ
(рис. 2.54,6).
Прямая, проведенная из точки р
параллельно направлению скорости точки
В,
пересечет прямую, проведенную из точки
а,
в точке b
и, следовательно, вектор
,
из точки а
проведем
прямую, перпендикулярную стержню АВ
(рис. 2.54,6).
Прямая, проведенная из точки р
параллельно направлению скорости точки
В,
пересечет прямую, проведенную из точки
а,
в точке b
и, следовательно, вектор
![]() будет равен
будет равен
![]() .
Точку с
на плане скоростей получить путем
нахождения точки пересечения прямых
линий, проведенных из точки а
перпендикулярно стержню АС
и из точки b
перпендикулярно ВС,
нельзя, так как эти линии сливаются.
Поэтому для нахождения точки с
воспользуемся соотношениями:
.
Точку с
на плане скоростей получить путем
нахождения точки пересечения прямых
линий, проведенных из точки а
перпендикулярно стержню АС
и из точки b
перпендикулярно ВС,
нельзя, так как эти линии сливаются.
Поэтому для нахождения точки с
воспользуемся соотношениями:
![]() .
.
Это
значит, что точка b
делит отрезок ас
в том же отношения, что и точка В
— отрезок
АС.
Таким образом находим точку с.
Вектор
![]() .
.
Теперь
проведем из точки р
прямую, параллельную направлению
скорости точки D,
а из точки с
— прямую, перпендикулярную стержню CD.
Пересечение этих прямых определит точку
d,
причем
![]() .
.