

Раздел III. Динамика
Динамикой называется раздел механики, в котором изучается движение материальных тел в зависимости от действующих на них сил. Динамика представляет собой наиболее общий раздел механики, имеющий особое значение для решения многих практических задач в различных областях техники.
В качестве материальных объектов в динамике рассматривают материальную точку, абсолютно твердое тело, систему материальных точек или тел (механическую систему).
Система отсчета – система координат, связанная с телом, по отношению к которому изучается движение другого тела.
Инерциальная система – система, в которой выполняются первый и второй законы динамики. Это неподвижная система координат либо система, движущаяся равномерно и прямолинейно поступательно.
Движение – изменение положения тела в пространстве и во времени.
Пространство в классической механике трехмерное, подчиняющееся эвклидовой геометрии.
Время – скалярная величина, одинаково протекающая в любых системах отсчета.
Масса тела – скалярная положительная величина, зависящая от количества вещества, содержащегося в данном теле, и определяющая его меру инертности при поступательном движении.
Инертность – свойство материальных тел быстрее или медленнее изменять скорость своего движения под действием приложенных сил.
Важнейшее понятие в динамике – сила. В статике рассматривались постоянные силы. В динамике рассматриваются переменные силы, зависящие от самых различных факторов – времени, координат, скорости. Силы в динамике – причины изменения кинематических характеристик движущихся объектов, траекторий, скоростей, ускорений, направления движения.
Глава 1. Динамика материальной точки
1.1. Основные законы механики
1. Первый закон (закон инерции). Материальная точка сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока действие других тел не изменит это состояние.
2. Второй закон (закон пропорциональности силы и ускорения). Ускорение материальной точки пропорционально приложенной к ней силе и имеет одинаковое с ней направление.
Этот закон выражается следующим образом (рис. 3.1):
![]() .
.

Рис. 3.1
3. Третий закон (закон равенства действия и противодействия). Всякому действию соответствует равное и противоположно направленное противодействие.
4. Четвертый закон (закон независимости действия сил). Несколько одновременно действующих на материальную точку сил сообщают точке такое ускорение, какое сообщила бы ей одна сила, равная их геометрической сумме (рис. 3.2).

Рис. 3.2
![]() ;
;
![]() ;
;
![]() .
.
1.2. Дифференциальные уравнения движения материальной точки
а) В проекциях на оси декартовых координат (рис. 3.3):
![]()
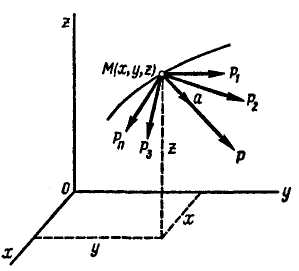
Рис. 3.3
б) В проекциях на оси естественного трехгранника:
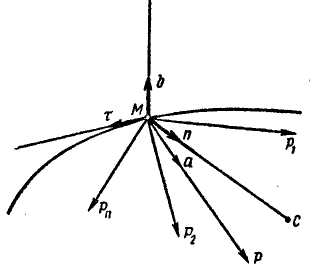
Рис. 3.4
1.3. Первая (прямая) задача динамики
Зная
массу точки
т и уравнения ее движения
![]()
![]() ,
,
![]() ,
найти модуль и
направление равнодействующей сил,
приложенных к точке.
,
найти модуль и
направление равнодействующей сил,
приложенных к точке.
Первую основную задачу динамики несвободной материальной точки, в которой требуется определить задаваемую силу или силу реакции, приложенную к точке, рекомендуется решать в следующем порядке:
- изобразить на расчетной схеме материальную точку в текущем положении и приложенные к ней задаваемые силы;
- применив принцип освобождаемости от связей, отбросить связи и изобразить реакции связей;
- выбрать систему отсчета, если она не указана в условии задачи;
- определить по заданному закону движения ускорение материальной точки и найти его проекции на выбранные оси координат;
- составить дифференциальные уравнения движения материальной точки, соответствующие принятой системе отсчета;
- из системы составленных уравнений определить искомую величину.
Задача
3.1. Груз А
спускается вниз по негладкой наклонной
плоскости, расположенной под углом
α
к горизонту (рис. 3.5), двигаясь согласно
уравнению
![]() ,
где g
- ускорение силы тяжести, а b
- постоянный
коэффициент. Определить модуль силы
трения скольжения груза о плоскость.
,
где g
- ускорение силы тяжести, а b
- постоянный
коэффициент. Определить модуль силы
трения скольжения груза о плоскость.
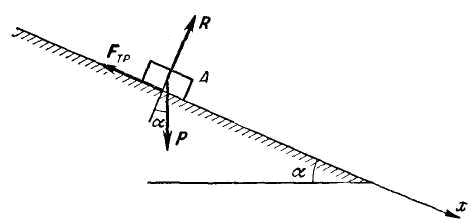
Рис. 3.5
Решение.
Изображаем на расчетной схеме груз А
в текущем положении, показываем задаваемую
силу
![]() .
Применяя принцип освобождаемости от
связей, отбрасываем связь (наклонную
шероховатую поверхность) и показываем
нормальную реакцию
.
Применяя принцип освобождаемости от
связей, отбрасываем связь (наклонную
шероховатую поверхность) и показываем
нормальную реакцию
![]() и силу трения
и силу трения
![]() ,
направленную в противоположную сторону
движения груза. Ось х
направляем в сторону движения.
,
направленную в противоположную сторону
движения груза. Ось х
направляем в сторону движения.
Составим дифференциальное уравнение движения груза в проекции на ось x
![]() .
(а)
.
(а)
Так как
![]() ,
то
,
то
![]() .
Масса груза равна m=P/g.
Теперь уравнение (а) принимает вид
.
Масса груза равна m=P/g.
Теперь уравнение (а) принимает вид
![]() .
.
Определяем искомую величину силы трения скольжения груза о наклонную плоскость:
![]() .
.