Глава 3. Динамика механической системы
3.1. Основные определения и понятия
Механической системой ( или системой материальных точек) называют такую совокупность точек, в которой положение или движение каждой точки зависит от положения и движения всех остальных.
Свободная механическая система – система на движение точек которой не наложено никаких связей.
Несвободная механическая система – система, на движение точек которой наложены связи.
Классификация сил
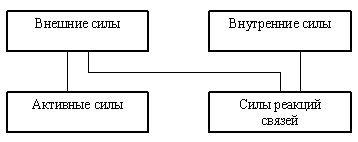
Рис. 3.26
Внешние силы
(![]() )
– силы,
действующие
на точки системы со стороны других
систем (3.26).
)
– силы,
действующие
на точки системы со стороны других
систем (3.26).
Внутренние силы
(![]() )
- силы
взаимодействия между материальными
точками данной механической системы.
)
- силы
взаимодействия между материальными
точками данной механической системы.
Свойства внутренних сил: главный вектор и главный момент внутренних сил механической системы равны нулю:
![]() .
.
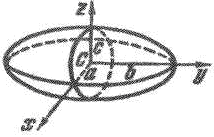
Центром масс системы называется геометрическая точка С, радиус-вектор которой (рис. 3.27)
![]() ,
,
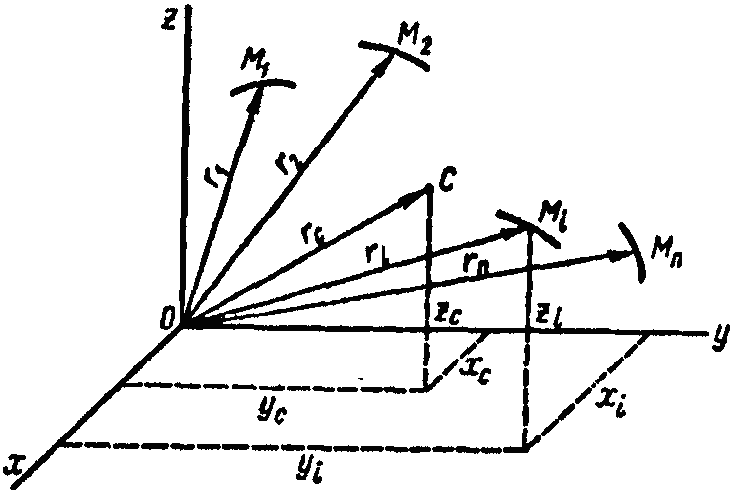
Рис. 3.27
а его координаты:
![]() ;
;
![]() ;
;
![]() ,
,
где
![]() -
масса системы (рис. 3.27).
-
масса системы (рис. 3.27).
3.2. Моменты инерции твердого тела относительно плоскости, оси и полюса
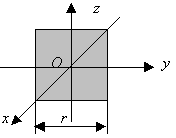
Моментом инерции (рис. 3.28) твердого тела относительно плоскости называется скалярная величина, равная сумме произведений массы каждой точки тела на квадрат расстояния от этой точки до плоскости.
![]()
Моментом инерции твердого тела относительно оси называется скалярная величина, равная сумме произведений массы каждой точки тела на квадрат расстояния от этой точки до оси.

Рис. 3.28
![]()
Моментом инерции твердого тела относительно полюса (полярным моментом инерции) называется скалярная величина, равная сумме произведений массы каждой точки тела на квадрат расстояния от точки до этого полюса.
![]() .
.
Часто в ходе
расчетов используется понятие радиуса
инерции
![]() .
Тогда
.
Тогда
![]() ,
,
где т – масса тела.
Радиус инерции геометрически равен расстоянию от оси той точки, в которой надо сосредоточить массу всего тела, чтобы момент инерции одной этой точки был равен моменту инерции всего тела.
3.3. Теорема о моментах инерции твердого тела относительно параллельных осей
Момент инерции твердого тела относительно некоторой оси равен моменту инерции тела относительно параллельной оси, проходящей через его центр масс, сложенному с произведением массы тела на квадрат расстояния между осями (рис. 3.29).
![]() ,
,
где
![]() -
момент инерции тела относительно
некоторой оси, которая проходит
параллельно оси, проходящей через центр
масс тела;
-
момент инерции тела относительно
некоторой оси, которая проходит
параллельно оси, проходящей через центр
масс тела;

Рис. 3.29
![]() ,
,
где
![]() -
момент инерции относительно оси,
проходящей через центр масс тела; d
– расстояние между осями; т
– масса тела.
-
момент инерции относительно оси,
проходящей через центр масс тела; d
– расстояние между осями; т
– масса тела.
3.4. Формула для вычисления момента инерции твердого тела относительно любой оси, проходящей через начало координат
Формула позволяет
вычислить момент инерции тела относительно
любой оси v,
проведенной через начало координат,
если известны моменты инерции тела
относительно осей координат
![]() и центробежные моменты инерции тела
относительно каждой пары координатных
осей
и центробежные моменты инерции тела
относительно каждой пары координатных
осей
![]() (рис. 3.30)
(рис. 3.30)
![]()
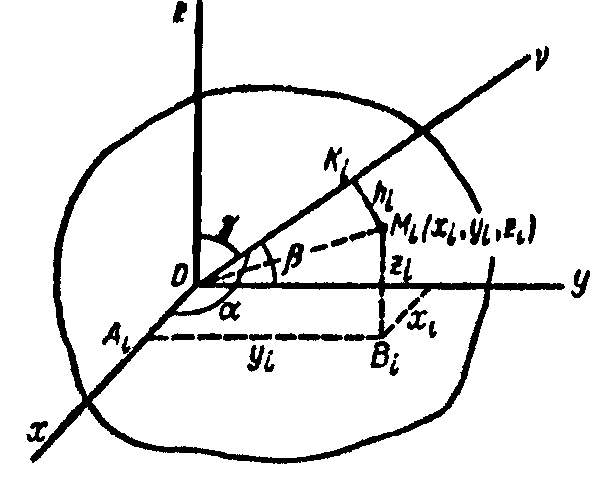
Рис. 3.30
В первые три слагаемых правой части входят множителями выражения, определяющие моменты инерции данного тела относительно координатных осей. Обозначим их следующим образом:
![]()
Кроме того, введем обозначения
![]()
Величины D, Е, F называются центробежными моментами инерции
твердого тела соответственно относительно осей у и z, z и х, х и у. Центробежные моменты инерции могут быть положительными, отрицательными и равными нулю.
Задача 3.8. На вал весом 60 кг насажено маховое колесо А весом 1 т и шестерня В весом 10 кг. Радиус вала равен 5 см, махового колеса – 1 м и шестерни – 10 см. Вычислить момент инерции системы относительно ее оси вращения z. Вал считать сплошным однородным цилиндром, шестерню – сплошным однородным диском. Масса маховика равномерно распределена по его ободу (рис. 3.31).
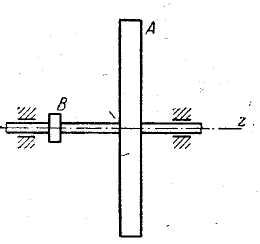
Рис. 3.31
Решение.
![]() ;
;
![]() ,
,
![]() ;
;
![]() ;
;
![]() .
.
Таблица 3.1
Моменты инерции твердых тел
Наименование |
Схема тела |
Момент инерции |
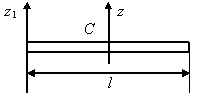
Тонкий прямолинейный стержень |
|
|
Кольцо (материальная окружность) |
|
|
Тонкий круглый диск |
|
|
Круглый цилиндр
|
|
|
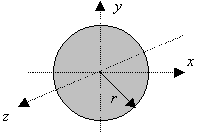
Шар |
|
|
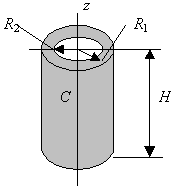
Полый цилиндр |
|
|
Однородный круглый конус |
|
|
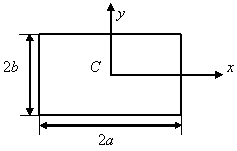
Сплошная прямоугольная пластина |
|
|
Сплошной квадрат |
|
|
Прямоугольный параллелепипед
|
|
|
Тор
|
|
|
Прямоугольная пирамида |
|
|
Эллипсоид |
|
|
Площадь эллипса |
|
|