

Глава 9. Силы, произвольно расположенные в пространстве
9.1. Вычисление главного вектора и главного момента
Системы сил, произвольно расположенных в пространстве
Произвольную систему сил в пространстве можно привести к одной силе, равной их главному вектору и приложенной в центре приведения, и к паре сил, момент которой равен главному моменту системы сил относительно центра приведения.
Для вычисления главного вектора и главного момента системы сил, произвольно расположенных в пространстве, воспользуемся методом проекций (рис. 1.92). Известно, что
![]() .
.
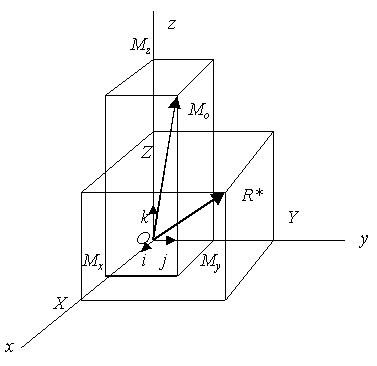
Рис. 1.92
Обозначив X, Y, Z проекции главного вектора на оси координат, получим
![]()
где
![]() –
проекции сил, соответственно на оси х,
у, z.
–
проекции сил, соответственно на оси х,
у, z.
Модуль и направление главного вектора определяются по формулам:
![]()
![]()
![]() .
.
Главный момент системы сил
![]()
Его
проекции
![]() на оси х,
у, z,
проведенные через точку О,
равны главным моментам системы сил
относительно этих осей:
на оси х,
у, z,
проведенные через точку О,
равны главным моментам системы сил
относительно этих осей:
![]()
Модуль и направление главного момента определяются по формулам:

Момент каждой силы можно вычислить непосредственно или по формулам:
![]()
Аналогично главные моменты можно определить по формулам:
![]()
![]()
9.2. Возможные случаи приведения сил, произвольно расположенных в пространстве
При приведении сил, произвольно расположенных в пространстве к заданному центру возможны следующие случаи.
Случай I.
![]() Если главный вектор системы сил и ее
главный момент относительно центра
приведения равны нулю, то силы взаимно
уравновешиваются.
Если главный вектор системы сил и ее
главный момент относительно центра
приведения равны нулю, то силы взаимно
уравновешиваются.
Случай
II.
![]() Если главный вектор системы сил равен
нулю, а ее главный момент относительно
центра приведения не равен нулю, то силы
приводятся к паре сил.
Если главный вектор системы сил равен
нулю, а ее главный момент относительно
центра приведения не равен нулю, то силы
приводятся к паре сил.
Момент этой пары сил равен главному моменту системы сил относительно центра приведения. В этом случае главные моменты системы сил относительно всех точек пространства геометрически равны.
Случай
III.
![]() Если главный вектор системы сил не
равен нулю, а ее главный момент относительно
центра приведения равен нулю, то силы
приводятся к равнодействующей
Если главный вектор системы сил не
равен нулю, а ее главный момент относительно
центра приведения равен нулю, то силы
приводятся к равнодействующей
![]() ,
линия действия которой проходит через
центр приведения.
,
линия действия которой проходит через
центр приведения.
Случай
IV.
![]() .
Ранее показано, что если главный
момент системы сил относительно
центра приведения перпендикулярен
главному вектору, то силы приводятся к
равнодействующей силе
,
линия действия которой не проходит
через центр приведения.
.
Ранее показано, что если главный
момент системы сил относительно
центра приведения перпендикулярен
главному вектору, то силы приводятся к
равнодействующей силе
,
линия действия которой не проходит
через центр приведения.
Случай
V.
![]() .
Ранее показано, что если главный момент
системы сил относительно центра
приведения не перпендикулярен главному
вектору, то силы приводятся к двум
скрещивающимся силам или к силовому
винту (динамо), т. е. к совокупности силы
и пары сил, плоскость действия которой
перпендикулярна силе.
.
Ранее показано, что если главный момент
системы сил относительно центра
приведения не перпендикулярен главному
вектору, то силы приводятся к двум
скрещивающимся силам или к силовому
винту (динамо), т. е. к совокупности силы
и пары сил, плоскость действия которой
перпендикулярна силе.
Случаи I-IV возможны и при расположении сил в одной плоскости.
9.3. Теорема о моменте равнодействующей силы
(теорема Вариньона)
Момент равнодействующей системы сил относительно любой точки равен геометрической сумме моментов составляющих сил относительно этой точки (рис. 1.93)
![]() .
.
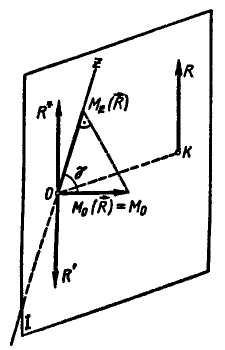
Рис. 1.93
9.4. Уравнения равновесия сил, произвольно расположенных
в пространстве
Для равновесия произвольной пространственной системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы главный вектор и главный момент этой системы сил равнялись нулю:
![]()
Условию равновесия в векторной форме соответствуют шесть уравнений равновесия:
![]() (а)
(а)
Первые три уравнения (а) называются уравнениями моментов сил относительно осей координат, а последние — уравнениями проекций сил на оси.
Для равновесия параллельной системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы главный вектор и главный момент этой системы сил равнялись нулю:
![]() ;
;
![]() .
.
Условиям равновесия в векторной форме для параллельной системы сил соответствуют три уравнения равновесия:
![]()
Задача 1.16. На рис. 1.94 изображен коленчатый вал двигателя. При вертикальном положении средней плоскости колена давление шатуна на середину шейки вала составляет Р = 12 кН и направлено в плоскости, перпендикулярной оси вала, под углом 15° к горизонтали.
На оси вала в точке С закреплен маховик весом G = 12 кН. В точке E укреплен шкив диаметром D = 80 см с ремнем, передающим момент на вал рабочей машины. Ветви ремня лежат в плоскости шкива и составляют с горизонталью угол, равный 30°. Отношение натяжения ведущей и ведомой ветвей T/t = 2.
Расстояние от оси шейки колена до оси вала r = 15 см. Расстояния по
оси вала указаны на рис. 1.94 в сантиметрах. Определить натяжения ветвей ремня T и t реакции подшипников А и В при равномерном вращении вала и при заданном его положении. (Весом шкива и вала можно пренебречь).

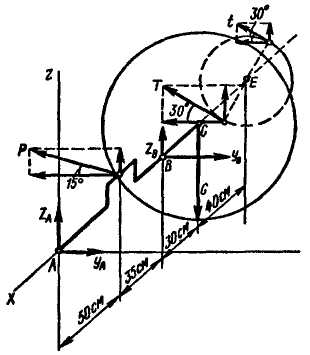
Рис. 1.94 Рис. 1.95
Решение.
Объект равновесия – коленчатый вал,
т.е. балка АЕ
с ломаной
осью. Показываем задаваемые силы: вес
маховика
,
давление шатуна на шейку вала
и реакции ветвей ремня
и
![]() ,
направленные по касательной к окружности
обода шкива. Отбрасывая связи (подшипника),
прикладываем к валу их реакции, разложенные
на составляющие
,
направленные по касательной к окружности
обода шкива. Отбрасывая связи (подшипника),
прикладываем к валу их реакции, разложенные
на составляющие
![]() (рис. 1.95).
(рис. 1.95).
Начало координат помещаем в точку А, ось х направляем по оси вала перпендикулярно плоскости чертежа, оси y, z – перпендикулярно к оси х (лежат в плоскости чертежа).
Для произвольной пространственной системы сил необходимым и достаточным условием равновесия является равенство нулю главного вектора и главного момента:
![]() .
.
Выбрав оси координат, как показано на рис. 1.96, составляем уравнения равновесия сил, произвольно расположенных в пространстве. Вал имеет две точки опоры А и В; первым составляем уравнение моментов относительно оси х, проходящей через эти точки.
1.
![]() .
.
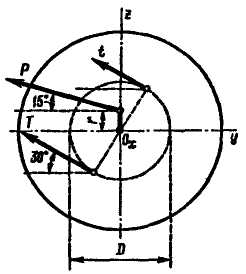

Рис. 1.96 Рис. 1.97
Так
как
![]() ,
то модули сил t
и Т
можно определить так:
,
то модули сил t
и Т
можно определить так:
![]() ,
,
откуда
![]() кН;
кН;
![]() кН.
кН.
Затем составляем следующие уравнения моментов по рис. 1.97. При вычислении моментов сил , и относительно оси у проецируем каждую из этих сил на плоскость, проходящую через точку приложения силы перпендикулярно оси у.
Полученные
проекции
![]() параллельны оси z.
параллельны оси z.
2.
![]()
![]() ,
,
Откуда

Аналогично
при составлении уравнения
![]() находим проекции сил
,
и
на плоскости, перпендикулярные оси z.
Эти проекции параллельны оси у
и соответственно имеют абсолютные
величины
находим проекции сил
,
и
на плоскости, перпендикулярные оси z.
Эти проекции параллельны оси у
и соответственно имеют абсолютные
величины
![]() .
.
3. :
![]() .
.
Определяем
![]() :
:
Составляем
уравнения проекций на оси
у и z
(все
действующие силы, перпендикулярные оси
х,
и уравнение
![]() преобразуются в тождество 0 = 0).
преобразуются в тождество 0 = 0).
4.
![]() .
.
Находим
![]() :
:
![]() .
.
5.
![]() .
.
Определяем
![]() :
:
![]()