

Глава 10. Центр тяжести
10.1. Последовательное сложение параллельных сил. Центр параллельных сил
Допустим,
что к твердому телу в точках
![]() приложены параллельные силы
приложены параллельные силы
![]() ,
из которых силы
,
из которых силы
![]() направлены в одну сторону, а силы
направлены в одну сторону, а силы
![]() - в противоположную (рис. 1.98).
- в противоположную (рис. 1.98).
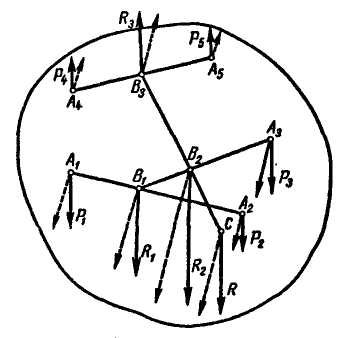
Рис. 1.98
Складываем
силы
![]() и
и
![]() по правилу сложения двух параллельных
сил, направленных в одну сторону:
по правилу сложения двух параллельных
сил, направленных в одну сторону:
![]() .
.
Определив
модуль равнодействующей силы
![]() и точку приложения ее
и точку приложения ее
![]() ,
складываем
с силой
,
складываем
с силой
![]() :
:
![]() .
.
Аналогично определяем равнодействующую сил :
![]() .
.
В
результате последовательного сложения
заданных параллельных сил получаем две
противоположно направленные параллельные
силы
![]() и
и
![]() в точках
в точках
![]() и
и
![]() .
В зависимости от модулей и точек
приложения этих сил возможны следующие
случаи.
.
В зависимости от модулей и точек
приложения этих сил возможны следующие
случаи.
1.
Силы
![]() и
и
![]() не равны по модулю.
Предположим, что в рассматриваемом
случае (рис. 1.98)
не равны по модулю.
Предположим, что в рассматриваемом
случае (рис. 1.98)
![]() >
>
![]() .
Тогда равнодействующая
заданных
сил имеет модуль
.
Тогда равнодействующая
заданных
сил имеет модуль
![]() и направлена в сторону большей силы
.
и направлена в сторону большей силы
.
Точка
С,
в которой приложена равнодействующая
сила
![]() ,
находится на продолжении отрезка
,
находится на продолжении отрезка
![]() за точкой
приложения большей силы, причем
за точкой
приложения большей силы, причем
![]() .
.
Точка С называется центром параллельных сил. Через эту точку обязательно проходит линия действия равнодействующей заданной системы параллельных сил, если, не изменяя модулей сил, поворачивать линии действия сил вокруг точек их приложения на один и тот же угол в одну и ту же сторону.
Действительно,
все приведенные равенства, определяющие
модули и точки приложения равнодействующих
сил
![]() ,
при повороте сил остаются справедливыми.
,
при повороте сил остаются справедливыми.
2. Силы и равны но модулю, но их линии действия не совпадают. В этом случае заданные силы приводятся к паре сил.
2. Силы и равны по модулю и их линии действия совпадают. В этом случае заданные силы взаимно уравновешиваются.
Система параллельных сил, направленных в одну сторону, не может уравновешиваться или приводиться к паре сил. Эта система всегда имеет равнодействующую.
10.2. Формулы радиуса-вектора и координат центра параллельных сил
Рассмотрим систему параллельных сил , приложенных в точках , приводящуюся к равнодействующей , приложенной в точке С (рис. 1.99).
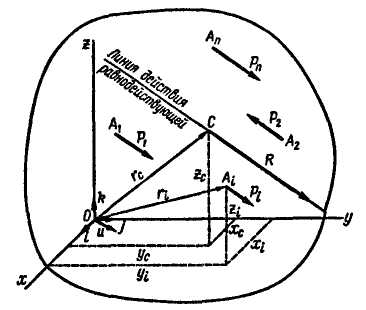
Рис. 1.99
Положение
центра параллельных сил С
определится его радиусом-вектором
![]() относительно
начала координат О
или тремя координатами
относительно
начала координат О
или тремя координатами
![]() .
Положение
точки приложения каждой силы
.
Положение
точки приложения каждой силы
![]() определяется радиусом-вектором
определяется радиусом-вектором
![]() или
координатами
или
координатами
![]() ,
где i=1,2,…,n.
,
где i=1,2,…,n.
![]() .
.
Спроецировав векторы левой и правой частей этого равенства на оси координат, получим формулы для вычисления координат центра параллельных сил:
 .
.
В
данных формулах числителем и знаменателем
каждой дроби является алгебраическая
сумма. Координаты точки приложения
каждой силы имеют тот или другой знак,
и параллельные силы, направленные в
одну сторону, считаются положительными,
а направленные противоположно
–отрицательными. Таким образом,
координаты
![]() в значения сил
в значения сил
![]() в этих
формулах являются алгебраическими
величинами.
в этих
формулах являются алгебраическими
величинами.
Выбор направления, вдоль которого параллельные силы считаются положительными, произволен и на результатах вычисления координат по формулам не отражается.