

4.2. Методичні вказівки
4.2.1. Початкові|вихідні| дані
Для розрахунку доцільно приймати конкретний автомобіль. Рекомендується побудувати|спорудити| графіки силового, потужнісного балансів і динамічну характеристику автомобіля для всіх передач, і додатково знайти значення: Vmax| для заданих дорожніх умов; максимальне прискорення автомобіля jmax|; максимальний подоланий підйом imax| – за допомогою графічних залежностей. Значення δвр|; Ме=f(n); Nе=f|(n); rД| приймаються з|із| попередніх занять; rК≈rД|.
При розрахунку приймається:
i = 0; РП = 0;
ηТ| – прийняти рівним: 0,9 для вантажних автомобілів і автобусів, 0,95 для легкових автомобілів;
Кр – прийняти рівним 0,95;
f = 0,01;
кВ| приймається рівним для:
гоночних|перегони| автомобілів – 0.15…0.2;
легкових автомобілів – 0.2…0.35;
вантажних автомобілів – 0.5…0.7;
автобусів – 0.35…0.45;
автоцистерн – 0.55...0.65;
автопоїздів – 0.85…0.95.
4.2.2. Порядок|лад| розрахунку
а) Силовий баланс.
По вище перелічених формулах розраховуються сили, що входять в рівняння (4.1).
Розраховується|лічить| сила Ртi на кожній передачі при різних значеннях n – від nmin| до nmax|, включаючи характерні|вдача| точки nМ|, nN| (див. заняття № 1).
На кожній передачі визначається V для кожного значення Ртi .
Швидкість визначають за формулою:
![]() [м/с]
[м/с]
де ni| – оберти|звороти,оберти| двигуна [об/хв];
Розраховуються сили опори, що входять в рівняння (4.1) (РК, РВ). Для розрахунку сили РВ беруться значення швидкості: перше значення на першій передачі, решта – на вищій передачі; РК=0,01Ga|; РИ – не розраховується, оскільки|тому що| виходить після|потім| відкладання всих сил на графік.
Наносяться|завдають| сили на графік.
б) Потужнісний баланс.
Порядок|лад| розрахунку такий же, як і для силового балансу. На графіку (рис. 4.3) зображають|змальовують| як NT| (NT=NeηТKP|), так і Ne| залежно від V на кожній передачі, а також всі складові правої частини|частки| рівняння (4.2).
в) Динамічний фактор|фактор|. Порядок|лад| розрахунку такий же, як і для силового балансу. Графік динамічного фактора|фактору| показаний на рис. 4.2.
г) Визначаються граничні параметри (Vmax, jmax|, αmax|);
Vmax| – знаходиться|перебуває| на перетині кривих PТ| і (РВ + РК) (рис. 4.1);
jmax| – знаходиться|перебуває| з|із| рівняння РИ для значення РИmax на першій передачі при ухилі|уклоні,схилі| дорогі|любі| = 0, PИ1max| = PT1max| - PK| (рис. 4.1)
αmax| – на першій передачі у випадку, коли вся сила тяги витрачається не на розгін, а на подолання|здолання| опору дороги|любі|
PПmax| = PT1max| - PK
Таблиця 4.1 – Результати розрахунків|
Показники |
Передача |
n, об/хв |
||||
nmin |
|
|
|
nmax |
||
V, м/с |
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
вища |
|
|
|
|
|
|
PT, кН |
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
вища |
|
|
|
|
|
|
ME,Нм |
|
|
|
|
|
|
D |
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
вища |
|
|
|
|
|
|
NE, кВт |
|
|
|
|
|
|
NT, кВт |
|
|
|
|
|
|
f0 |
|
|
||||
PK, кН |
|
|
||||
PB, кН |
|
|
|
|
|
|
PK+PB, кН |
|
|
|
|
|
|
NK, кВт |
|
|
|
|
|
|
NB, кВт |
|
|
|
|
|
|
NK+NB, кВт |
|
|
|
|
|
|
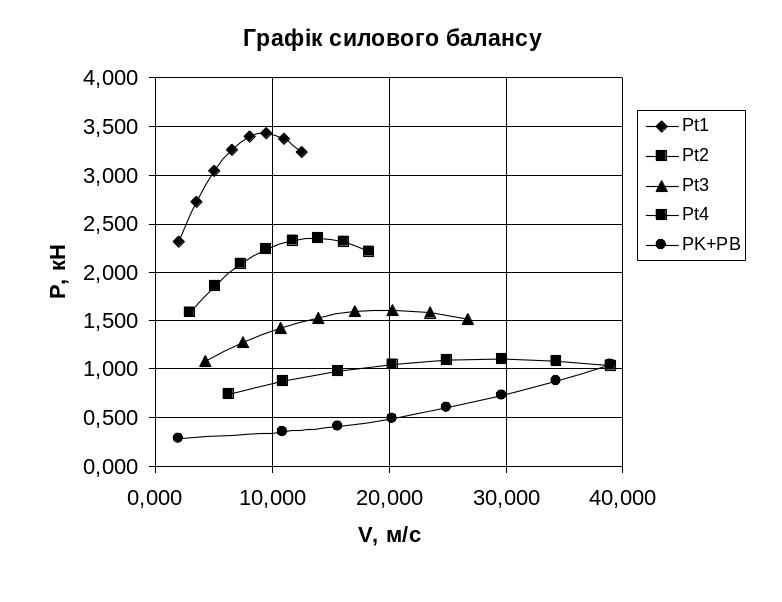
Рис. 4.1 – Графік силового балансу
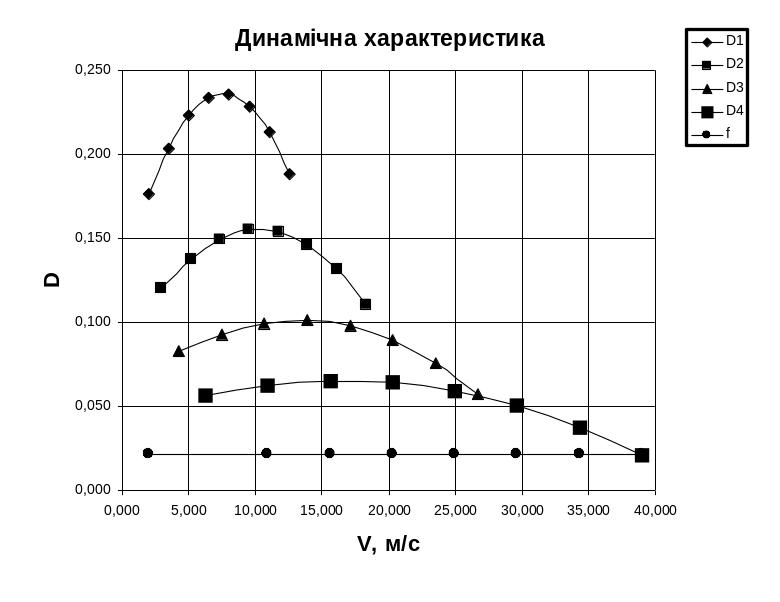
Рис. 4.2 – Динамічна характеристика автомобіля
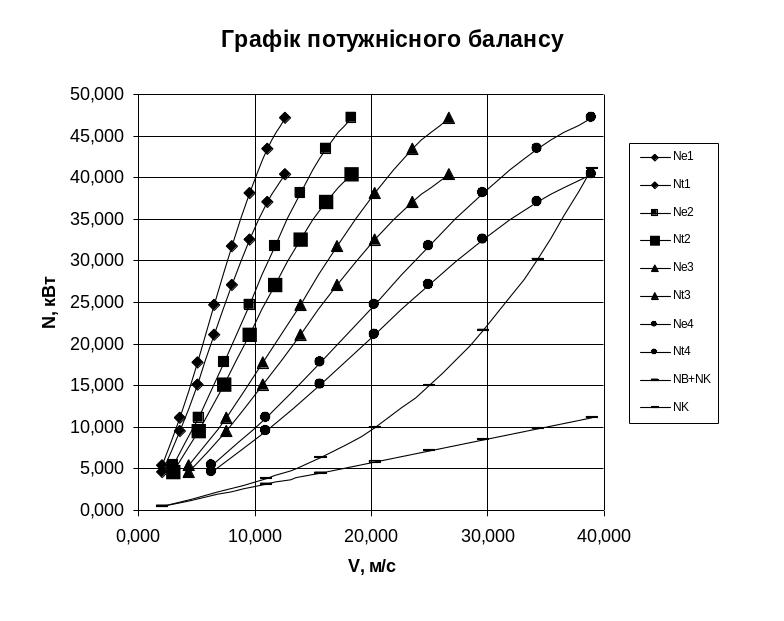
Рис. 4.3 – Графік потужнісного балансу