

1.3. Методичні вказівки
1.3.1. Початкові|вихідні| дані
Для виконання розрахункової частини|частки| першого завдання|задавання| за об'єкт розрахунку береться конкретний тип двигуна (Ne|, Ме, nN|, nM|).
Розрахунок ведеться при різних значеннях частоти обертання колінчастого валу двигуна в діапазоні від nmin| до nmax|.
nmin| для всіх автомобілів приймаємо – 1000 об/хв;
nmax| для двигунів з|із| обмежувачем частоти обертання – nN|, для решти двигунів – 1,1nN| об/хв.
1.3.2. Послідовність розрахунків
Після|потім| отримання|здобуття| початкових|вихідних| даних визначаються: МеN, KM|, Kω| МЗ, а, b, с|із|, аМ|, bM|, cM|.
Далі розраховуються залежності Ne=f|(n), Ме=f(n) трьома способами:
Ne| – за формулою (1.1) (1-й спосіб а,b,c| – знайдені за формулами (1.9) (1.10); 3-й спосіб – за формулами (1.12).
Me| – за формулами (1.2) (1.3) (1-й спосіб а,b,c| – знайдені за формулами (1.9) (1.10); 2-й спосіб – ам|, bм|, см; 3-й спосіб – за формулами (1.12).
При різних значеннях n – від nmin| до nmax| (не менше восьми значень n, обов’язково повинні бути присутніми характерні|вдача| точки|точки| – nN| і nM|) заповнюється таблиця:
Таблиця 1.1 – Результати розрахунків
|
1 спосіб |
2 спосіб |
3 спосіб |
|||
ne |
Ne, кВт |
Ме, Н·м |
Ne, кВт |
Ме, Н·м |
Ne, кВт |
Ме, Н·м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Далі, за даними таблиці будується зовнішня швидкісна характеристика двигуна (рис. 1.1, рис. 1.2) – для побудови|шикування| вибираються значення (спосіб), що найближче|поблизу| співпадає з|із| паспортними|вихідними| даними, і визначається відносна помилка розрахунків.
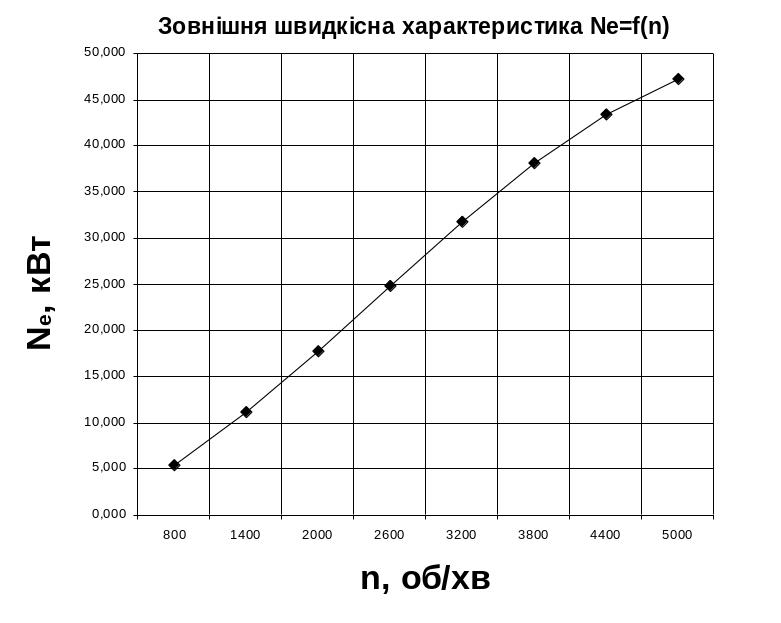
Рис. 1.1 – Зовнішня швидкісна характеристика Ne=f(n)

Рис. 1.2 – Зовнішня швидкісна характеристика Мe=f(n)
Радіуси і режими кочення еластичного колеса
Мета|ціль| практичного заняття №2 – оволодіння студентами методів визначення радіусів еластичного колеса і закріплення знань, отриманих|одержувати| на лекції з режимів кочення колеса, на прикладі|зразку| вирішення конкретної задачі.
2.1. Радіуси колеса
2.1.1. Загальні|спільні| відомості
При опису та аналізу процесу кочення колеса використовують параметри, які називають радіусами колеса. Розрізняють вільний радіус rВ|, статичний радіус rСТ|, динамічний радіус rД|, кінематичний радіус (радіус кочення) rK|.
Вільний радіус – половина діаметра найбільшого перетину бігової доріжки колеса (не навантаженого зовнішніми силами) площиною|плоскістю|, перпендикулярною до вісі обертання, за відсутності контакту колеса з|із| опорною поверхнею.
Статичний радіус – відстань від центру нерухомого колеса, навантаженого лише|лише| нормальною силою, до опорної поверхні.
Динамічний радіус – відстань від центру колеса, що котиться, до опорної поверхні дороги|любі|.
Кінематичний радіус – відношення|ставлення| подовжньої складової поступальної швидкості VK| до його кутової швидкості.
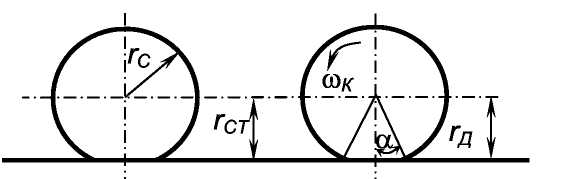
Рис. 2.1 – Радіуси еластичного колеса