

Действительное и возможное перемещение. Возможная работа. Идеальные связи.
Рассмотрим бесконечно малые перемещения точек системы, совместимые со связями, наложенными на систему. Среди этих перемещений будем различать два вида перемещений - виртуальные и действительные.
Рассмотрим виртуальное перемещение точки системы с номером i. Виртуальным перемещением δri называется мысленное бесконечно малое перемещение точки, допускаемое связями без их разрушения в данное фиксированное мгновение времени.
Если связь одна и описывается уравнением (2), физически ясно, что связь не нарушится, когда вектор виртуального перемещения
|
(3) |
будет лежать в плоскости, касательной к поверхности связи, зафиксированной в данное мгновение времени. Математически это условие выражается как
|
(4) |
где grad f - градиент функции (2) при фиксированном t, перпендикулярный поверхности связи в месте нахождения точки, равный
|
(5) |
Учитывая выражения (3) и (5), раскрываем скалярное произведение в (4), получаем уравнение, которому должны удовлетворять проекции δxi, δyi, δzi виртуального перемещения δri, чтобы связь не нарушалась:
|
(6) |
В вариационном исчислении бесконечно малые величины δri, δxi, δyi, δzi называются вариациями функций ri, xi, yi, zi. Изменения координат точек или уравнений связи при неизменном времени находятся синхронным варьированием, которое осуществляется согласно левым частям формул (4) и (6).
То есть проекции δxi, δyi, δzi виртуального перемещения точки δr обращают в нуль первую вариацию уравнения связи при условии, что время не варьируется (синхронное варьирование):
|
(7) |
Следовательно, виртуальное перемещение точки не характеризует ее движение, а определяет связь или, в общем случае, связи, наложенные на точку системы. Таким образом, виртуальные перемещения позволяют учесть эффект механических связей, не вводя реакции связей, как мы это делали раньше, и получать уравнения равновесия или движения системы в аналитическом виде, не содержащие неизвестных реакций связей.
Не следует путать виртуальное перемещение точки с ее элементарным действительным перемещением dri = Vidt, которое действительно происходит за элементарный промежуток времени dt и направлено, как и скорость Vi, по касательной к траектории движения точки.
Отметим еще ряд особенностей виртуальных и действительного перемещения точки:
а) у точки имеется только одно элементарное действительное перемещение, а виртуальных перемещений у точки может быть несколько и даже бесконечно много, например в случае, когда на точку наложена только одна голономная связь;
b) если голономная связь нестационарная, то элементарное действительное перемещение не совпадает ни с одним из виртуальных перемещений точки;
c) если голономная связь стационарна, то элементарное действительное перемещение точки совпадает с одним из ее виртуальных перемещений.
Последние
два утверждения можно доказать
аналитически, однако это можно показать
графически на примере рассмотренных
голономных связей (рис. 59, b и c). 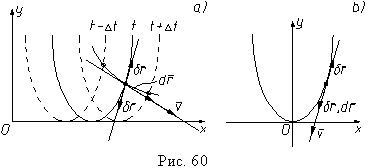
На рис. 60, a изображена нестационарная связь (подвижная связь) в моменты времени t - Δt, t, t + Δt, где t - фиксированное значение времени, когда определяются виртуальные перемещения, а Δt - приращение времени. Там же построены: действительная траектория бусинки, уравнение которой не совпадает с уравнением связи в момент времени t из-за движения бусинки; скорость бусинки V, направленная по касательной к действительной траектории, и вектор элементарного действительного перемещения dr, который не совпадает ни с одним из виртуальных перемещений δr, направленных по касательной к связи в момент времени t. На рис. 60, b показана стационарная связь, где бусинка движется по неподвижной связи, ее скорость всегда направлена по касательной к связи, за счет чего элементарное действительное перемещение dr совпадает с одним из виртуальных перемещений δr.
Виртуальным перемещением системы материальных точек называется совокупность виртуальных перемещений всех ее точек:
|
(8) |
которые удовлетворяют уравнениям виртуальных перемещений точек системы
|
(9) |
где l - число наложенных на систему связей.
В понятиях многомерной геометрии виртуальное перемещение системы (8) можно интерпретировать как виртуальное перемещение δr точки, положение которой определяется радиус-вектором r с проекциями x1, y1, z1, ..., xn, yn, zn. Тогда уравнения (9) можно записать в виде
![]()
Отметим, что в некоторых учебниках вместо термина "виртуальное перемещение" употребляют термин "возможное перемещение". По существу это одно и то же, так как латинское слово virtualis означает возможный. Однако из-за особенностей русского языка в современной отечественной научной и учебной литературе чаще используют термин "виртуальное перемещение".
Виртуальные работа и мощность.
Здесь мы рассмотрим понятия виртуальной работы силы и виртуальной работы и мощности сил системы.
Виртуальной работой силы δA(F) называется скалярное произведение силы на виртуальное перемещение точки ее приложения:
|
(11) |
Выражение (9) аналогично выражению для вычисления элементарной работы силы. Поэтому для вычисления виртуальной работы силы можно применять все способы, которые применяются для вычисления элементарной работы силы. Разница состоит лишь в том, что элементарная работа совершается в действительности, а виртуальная работа - это воображаемая работа, которая существует только в нашем сознании, так как виртуальное перемещение - мысленное бесконечно малое перемещение.
Считая постоянными силы F1, F2, ..., Fn, действующие на точки системы, дадим системе виртуальное перемещение δr так, чтобы все точки системы имели виртуальные перемещения δr1, δr2, ..., δrn, и подсчитаем сумму виртуальных работ сил системы на этом перемещении:
|
(12) |

Эта сумма называется виртуальной работой сил системы.
Учитывая, что виртуальные перемещения пропорциональны виртуальным скоростям Vi*, запишем (12) в виде
![]()
где k - коэффициент пропорциональности, имеющий размерность времени. Разделив обе части последнего выражения на k, получим выражение виртуальной мощности сил системы:
|
(13) |

Идеальные связи.
Здесь рассматривается еще один вид связей, которые называются идеальными. Связь называется идеальной, если виртуальная работа ее реакции связи равна нулю:
|
(14) |
Если на систему наложены только идеальные связи, то алгебраическая сумма виртуальных работ реакций связей на любых виртуальных перемещениях точек системы или виртуальная работа ее реакций связей равна нулю, то есть
|
(15) |
Можно непосредственно убедиться в том, что эти условия выполняются для известных нам типов связей. Но при изучении теоремы об изменении кинетической энергии, где используется понятие элементарной работы, мы уже доказали, что элементарная работа реакций гладких поверхностей, идеальных шарниров равна нулю. Там же мы доказали, что равны нулю работа внутренних сил абсолютно твердых тел и реакций связей, всегда приложенных в мгновенном центре скоростей.
Следовательно, к идеальным связям относятся:
a) гладкие поверхности;
b) идеальные шарниры, где моменты сопротивления малы;
с) твердые тела - нерастяжимые стержни, нити и т.д.;
d) шероховатая твердая поверхность, по которой без скольжения катится твердое тело и т.д.