

Дифференциальные уравнения движения механической системы.
Рассмотрим
систему, состоящую из п
материальных точек. Выделим какую-нибудь
точку системы с массой
![]() .
Обозначим равнодействующую всех
приложенных к точке внешних сил (и
активных и реакций связей) через
.
Обозначим равнодействующую всех
приложенных к точке внешних сил (и
активных и реакций связей) через
![]() ,
а равнодействующую всех внутренних сил
- через
,
а равнодействующую всех внутренних сил
- через
![]() .
Если точка имеет при этом ускорение
.
Если точка имеет при этом ускорение
![]() ,
то по основному закону динамики
,
то по основному закону динамики
![]() .
.
Аналогичный результат получим для любой точки. Следовательно, для всей системы будет:
Эти
уравнения, из которых можно определить
закон движения каждой точки системы,
называются дифференциальными
уравнениями движения системы
в векторной форме. Уравнения являются
дифференциальными, так как
![]() ;
входящие в правые части уравнений силы
будут в общем случае зависеть от времени,
координат точек системы и их скоростей.
;
входящие в правые части уравнений силы
будут в общем случае зависеть от времени,
координат точек системы и их скоростей.
Проектируя на какие-нибудь координатные оси, мы можем получить дифференциальные уравнения движения системы в проекциях на эти оси.
Теорема о движении центра масс. Следствия.
В ряде случаев для определения характера движения системы (особенно твердого тела), достаточно знать закон движения ее центра масс. Например, если бросить камень в цель, совсем не нужно знать как он будет кувыркаться во время полета, важно установить попадет он в цель или нет. Для этого достаточно рассмотреть движение какой-нибудь точки этого тела.
Чтобы найти этот закон, обратимся к уравнениям движения системы и сложим почленно их левые и правые части. Тогда получим:
![]() .
.
Преобразуем левую часть равенства. Из формулы для радиус-вектора центра масс имеем:
![]() .
.
Беря от обеих частей этого равенства вторую производную по времени и замечая, что производная от суммы равна сумме производных, найдем:
![]()
или
![]() .
.
где
![]() -
ускорение центра масс системы. Так как
по свойству внутренних сил системы
-
ускорение центра масс системы. Так как
по свойству внутренних сил системы
![]() ,
то, подставляя все найденные значения,
получим окончательно:
,
то, подставляя все найденные значения,
получим окончательно:
![]() (4)
(4)
Уравнение и выражает теорему о движении центра масс системы: произведение массы системы на ускорение ее центра масс равно геометрической сумме всех действующих на систему внешних сил. Сравнивая с уравнением движения материальной точки, получаем другое выражение теоремы: центр масс системы движется как материальная точка, масса которой равна массе всей системы и к которой приложены все внешние силы, действующие на систему.
Проектируя обе части равенства на координатные оси, получим:
![]()
![]()
![]()
![]()
Эти уравнения представляют собою дифференциальные уравнения движения центра масс в проекциях на оси декартовой системы координат.
Следствие
1. Если главный вектор внешних сил,
приложенных к механической системе,
равен нулю, то центр масс системы
находится в покое или движется равномерно
и прямолинейно. Так как ускорение центра
масс равно нулю,
![]() .
.
Следствие 2. Если проекция главного вектора внешних сил на какую-нибудь ось равна нулю, то центр масс системы или не изменяет своего положения относительно данной оси, или движется относительно нее равномерно.
Н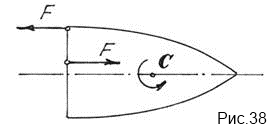 апример,
если на тело начнут действовать две
силы, образующие пару сил (рис.38), то
центр масс
С
его будет двигаться по прежней траектории.
А само тело будет вращаться вокруг
центра масс. И неважно, где приложена
пара сил.
апример,
если на тело начнут действовать две
силы, образующие пару сил (рис.38), то
центр масс
С
его будет двигаться по прежней траектории.
А само тело будет вращаться вокруг
центра масс. И неважно, где приложена
пара сил.
Кстати, в статике мы доказывали, что действие пары на тело не зависит от того, где она приложена. Здесь мы показали, что вращение тела будет вокруг центральной оси С.