5.2 Решение задач по теме 5
Рассмотрим несколько примеров, в которых применяется метод замены плоскостей проекций.
Задача 5.1. Определить расстояние от точки S до плоскости треугольника ABC (рисунок 30).
Расстояние от точки до плоскости может быть определено непосредственно на эпюре, если плоскость будет проецирующей.
Заменим плоскость V на новую плоскость проекций V1. Плоскость V1 выберем так, чтобы она оказалась перпендикулярной плоскости треугольника АВС. Новая ось проекции х1 при этом должна быть перпендикулярна горизонтальной проекции горизонтали.
|
Рисунок 30 – Определение расстояния от точки S до плоскости треугольника |
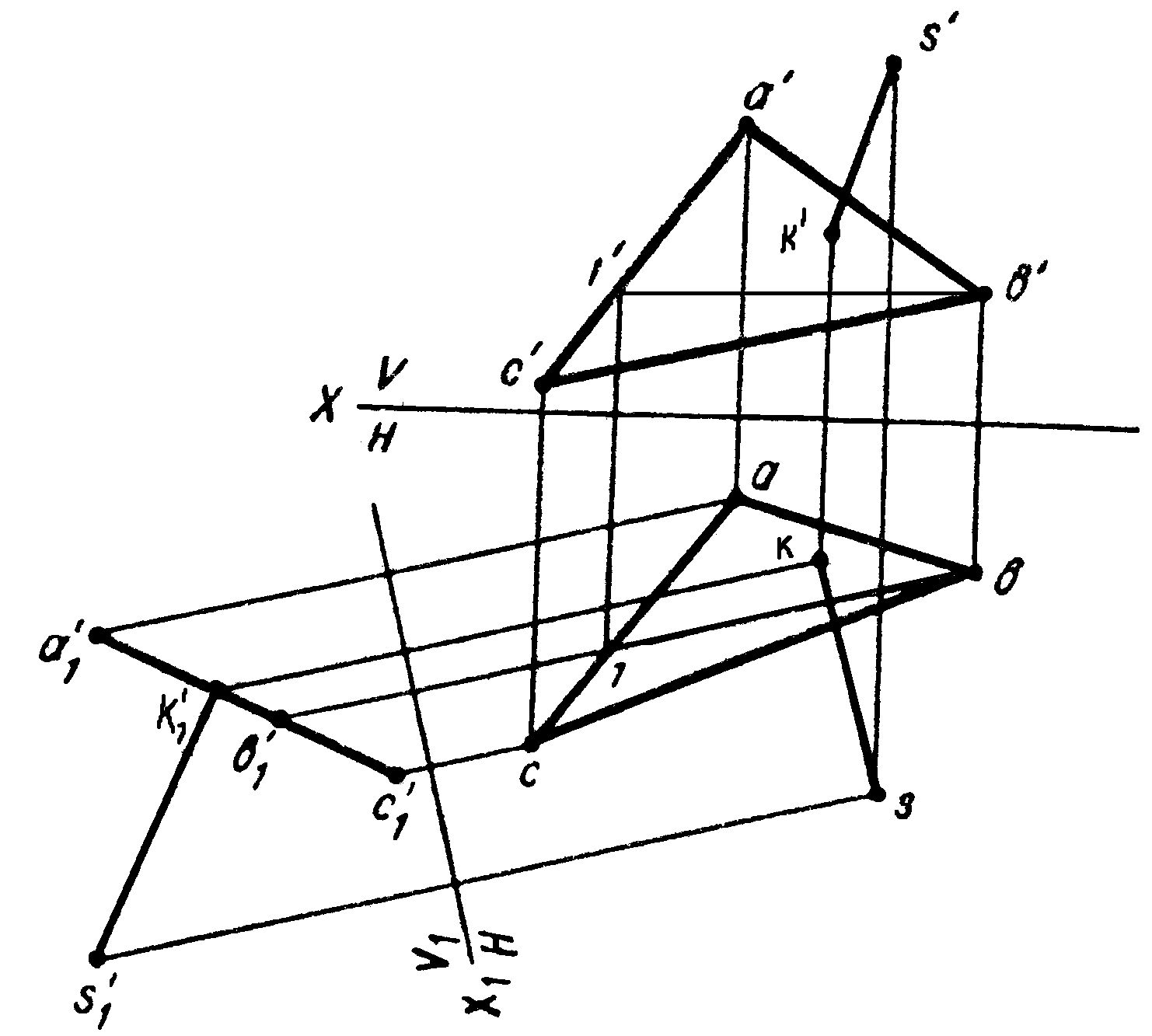
Проекция отрезка s'1k'1 перпендикулярна проецирующей плоскости a¢1b¢1c¢1 и проецируется в натуральную величину на плоскости V1. Поэтому для переноса проекции основания перпендикуляра k'1 на горизонтальную плоскость проекций H проекцию sk проводим параллельно оси x1.
Задача 5.2. Определить углы наклона плоскостей ab//cd и Р к горизонтальной плоскости проекций (рисунок 31).
|
Рисунок 31 – Определение угла наклона плоскостей ab//cd и Р к горизонтальной плоскости проекций Н |
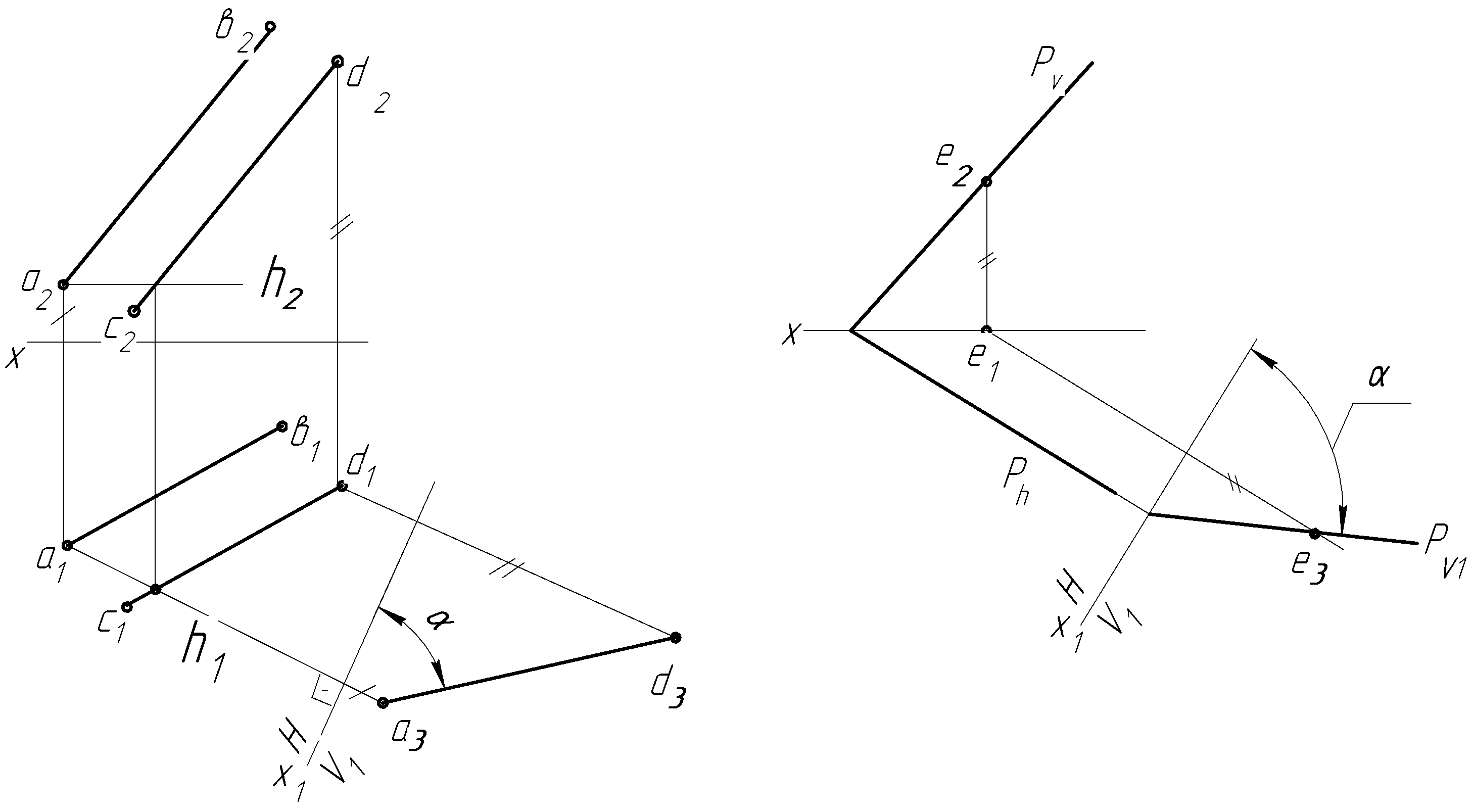
Чтобы определить угол наклона плоскостей ab//cd и Р к горизонтальной плоскости проекций, их следует превратить во фронтально проецирующие.
Заменим систему плоскостей V/H новой системой H/V1. Новую ось X1 проведем перпендикулярно h1 и РH. Положение следа РH не изменяется. Он спроецируется в точку прямо на ось X1. Для того чтобы найти направление нового фронтального следа (РV1) плоскости, берем на следе РV произвольную точку (е) и находим ее новую фронтальную проекцию (е3). Через точки на оси и e3 проводим новый фронтальный след (РV1) плоскости. Найденный угол α и будет искомым.
Тема 6 «Преобразование чертежа методами вращения»
Задачи по теме 6 выдаются на шестой неделе, после практического занятия 9 [1, 2, 7].
Для преобразования чертежа существует несколько методов вращения: вращение с указанием оси, плоско-параллельный перенос, вращение вокруг прямой уровня, вращение вокруг следа плоскости.
6.1 Теория к выполнению индивидуального задания. Четыре основные задачи
6.1.1 Первая задача: преобразование прямой общего положения в прямую уровня
а) Метод вращения с указанием положения оси вращения рассмотрим на примере определения истинной величины отрезка АВ (рисунок 32).
|
|
Рисунок 32 – Определение истинной величины отрезка АВ и угла наклона его к плоскости проекций V |
Рисунок 33 – Определение истинной величины отрезка АВ и угла наклона его к плоскости проекций Н |
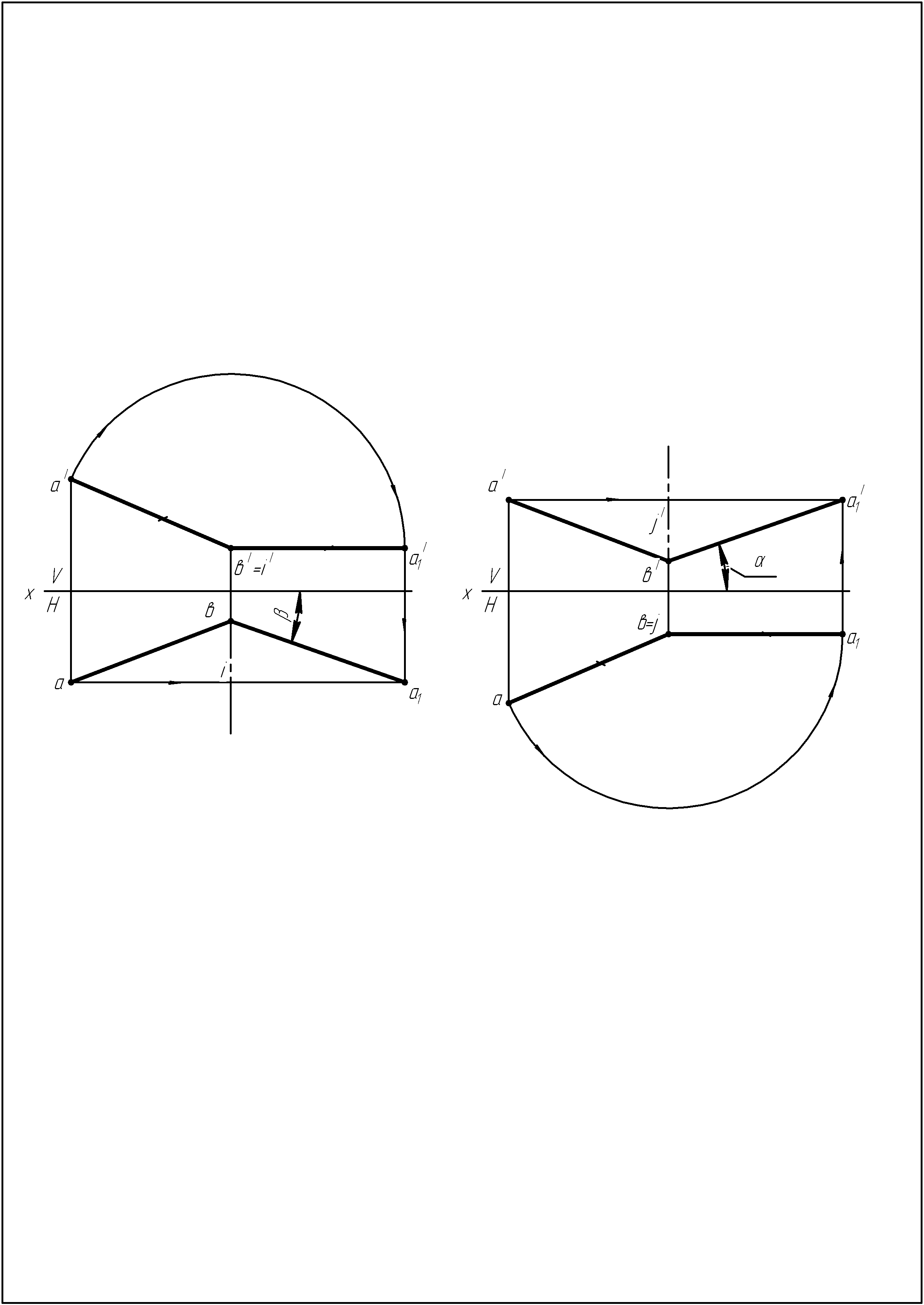
Проекции отрезка АВ (ав и ав) занимают общее положение в пространстве, преобразуем их в положение отрезков прямой уровня. Для этого используем ось вращения i, перпендикулярную фронтальной плоскости проекций и проходящую через точку В отрезка. Повернём фронтальную проекцию отрезка без изменения величины проекции отрезка до положения параллельного оси x, т.е. в положение горизонтали a1b1. Горизонтальная проекция отрезка принимает новое положение: проекция точки а перемещается по перпендикуляру к оси вращения i в положение a1. На горизонтальной плоскости проекций a1b – истинная величина отрезка АВ и угол b – угол наклона отрезка АВ к фронтальной плоскости проекций V.
На рисунке 33 приведено аналогичное построение, но ось вращения j перпендикулярна горизонтальной плоскости проекций. Вращая горизонтальную проекцию отрезка ab на фронтальной плоскости проекций, получаем истинную величину a1b отрезка АВ и угол α – угол наклона отрезка АВ к горизонтальной плоскости проекций H.
Это же решение задачи можно получить способом без указания положения осей вращения ‑ плоскопараллельным перемещением.
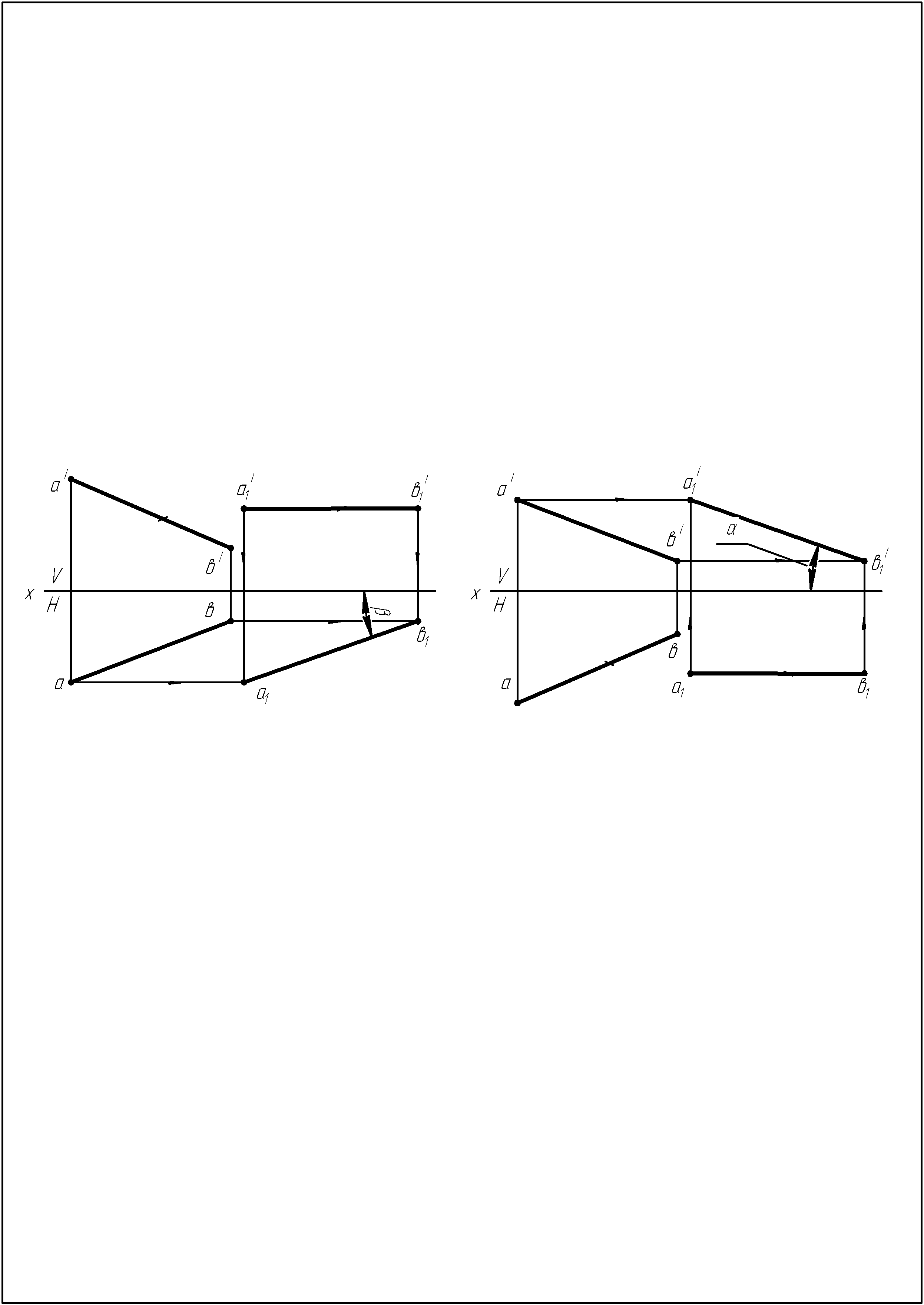
б) Метод вращения без указания оси вращения (плоско-параллельный перенос) приведен на рисунках 34, 35.
|
|
Рисунок 34 – Определение истинной величины отрезка АВ и угла наклона его к плоскости проекций V |
Рисунок 35 – Определение истинной величины отрезка АВ и угла наклона его к плоскости проекций Н |