

2. Технічні засоби протидії несанкціонованого запису мовної інформації на диктофони
2.1. Виявлення диктофонів
Найпоширенішою проблемою, з якої зіштовхуються фахівці, є бажання забезпечити себе від несанкціонованого запису мовної інформації на диктофони.
Дійсно, при наявності на ринку засобів реєстрації аудіоінформації, диктофон залишається найдешевшим та ефективним з них. При цьому диктофон не є спецзасобом і його придбання не пов’язане з одержанням якихось особливих дозволів.
Фізичний принцип, покладений в основу пристроїв виявлення диктофонів, - це реєстрація побічних електромагнітних випромінювань працюючого двигуна і головки підмагнічування диктофона.
Теоретично, максимальна дальність виявлення диктофона - 2÷4 м. Але практично це досягається тільки в спеціальних камерах, вартістю близько 100000$. У реальності існують численні перешкоди, у першу чергу магнітні поля промислової частоти (50 Гц) і її гармоніки. Рівень перешкод коливається від 10÷4 до 10÷1 А/м. Це при тому, що напруженість поля, яке створюється диктофоном на відстані біля одного метра становить від 10÷5 до 10÷6 А/м. Таким чином, рівень перешкод може перевищувати рівень сигналу в 100 000 разів. Не менші проблеми створює монітор комп’ютера, що з дистанції в 20 м створює напруженість поля, такого ж рівня, що й диктофон з відстані в 1 м.
Вищенаведені міркування справедливі тільки для диктофонів на мікрокасетах, але не для цифрових диктофонів, які практично взагалі не мають побічних електромагнітних випромінювань.
Отже, реальна можливість виявлення диктофона не виходить за рамки 1÷1,8 м, залежно від типу диктофона.
2.2. Технічні засоби виявлення несанкціонованого запису мовної інформації на диктофони
Пристрої виявлення випускаються як у стаціонарних, так і у мобільних варіантах.
Стаціонарні варіанти пристроїв виявлення диктофонів мають більшу чутливість і імовірність виявлення, вони складаються з датчиків і центрального блоку керування, що обробляє сигнали від датчиків. Датчики монтуються по периметрі стола. До одного центрального блоку можна підключити до 16 датчиків. Стаціонарні пристрої виявлення впевнено виявляють всі існуючі типи плівкових диктофонів на відстані до 1 м.

Приклад стаціонарного пристрою виявлення - PTRD-018
Мобільні варіанти пристроїв мають набагато меншу чутливість і ймовірність виявлення. Ці пристрої складаються, як правило, з керуючого блоку і спеціального зонда, що зазвичай ховається в рукаві. Для виявлення диктофонів необхідно наблизити зонд на відстань 5÷20 см (екрановані диктофони типу L-400 такий прилад не визначить взагалі).

Приклад мобільного пристрою виявлення - TRD-800
2.3. Захист від несанкціонованого запису мовної інформації на диктофони
Єдиним реальним способом захисту від запису мовної інформації на диктофони є “подавляч диктофонів”.
Перевіреним і зарекомендувавшим себе приладом, є подавляч диктофонів і радіомікрофонів “Буран-3M”.

Пристрій придушення диктофонів Буран-3M
Пристрій “Буран-3М” являє собою генератор нечутної для людського вуха шумоподібної завади, керований мікропроцесором, що включає модуль живлення і антенний модуль. У результаті дії приладу на магнітну стрічку або інший носій інформації диктофона замість мови записується генерований “Бураном” шум. “Буран-3М” впливає на звукозаписні пристрої вузьконаправленим плоскополяризованим випромінюванням.
Площина поляризації хвилі випромінювання збігається із площиною максимального габариту приладу. Ширина діаграми спрямованості випромінювання становить 45 (в ортогональній площині ширина діаграми спрямованості - 30 ).
Ефект від роботи приладу полягає у впливі імпульсного випромінювання на нелінійні елементи схем диктофонів. Шум, генерований приладом, записується на магнітну стрічку.
Результати випробувань, проведені фірмою “Диджитал енд Аналог Системс”, м.Київ:
Таблиця 1
-
Диктофон, модель
Відстань придушення, м
OLYMPUS S700, S710
2,8
OLYMPUS S722, S725
2,8
OLYMPUS L150, L250
1,6
OLYMPUS L400
1,3
SONY TCM-353, TCM-359, TCM-373
2,5
SAMSUNG SVR-S820|S410
1,2
“Буран-3М” може встановлюватися як стаціонарно, так і у кейс для оперативного використання. Включення приладу здійснюється за допомогою кнопки (під столом або під ручкою кейса). Додатково прилад може комплектуватися пультом дистанційного керування (по радіоканалу).
Розглянемо завдання виміру рівня магнітної складової електромагнітного поля, створюваного диктофоном. Для цього припустимо, що інші джерела відсутні. Найбільш просте рішення цієї задачі представлено у виді структурної схеми на рис. 1.

Рис. 1. Структурна схема виявника диктофонів на основі широкосмугового порогового детектора
Магнітна антена (МА) має амплітудно-частотну характеристику, що виділяє необхідний частотний діапазон. Підсилювач сигналу (ПС) з антени повинний бути з мінімальним власним шумом, що і визначає чутливість усієї системи і, отже, дальність виявлення. Теоретично рівень спрацьовування граничного детектора (ГД) може бути встановлений на значені максимального власного шуму підсилювача. Відповідно перевищення цього рівня покаже на пристрої індикації (ПІ) наявність джерела поля. Можлива відстань до диктофона для такого виявника визначено власним шумом і знаходиться в межах від десятків сантиметрів до 2 м, у залежності від типу диктофона. У реальних умовах у деякій точці простору завжди присутній визначений інтегральний рівень електромагнітного випромінювання, створений безліччю інших, близьких і далеких джерел. Цей рівень може значно перевищити власний шум пристрою виявлення. Більш того, деякі джерела (наприклад, змінний струм у мережі 220В ) створює дуже великий рівень поля і фактично блокує можливість виміру інших полів. Ці умови приводять до необхідності використовувати як магнітну антену (МА) не одну котушку, а дві, рознесені на деяку відстань і включені диференційно. Така магнітна антена стає градієнтометром. При цьому досягається значне ослаблення впливу вилученого джерела, особливо при збільшенні відстані між котушками. На жаль, рівень сигналу від ближнього джерела (диктофона) теж падає. Але це плата за саму можливість виміру поля ближнього джерела. З огляду на дію “паразитних” електромагнітних полів, для реєстрації випромінювання диктофона, необхідний блок виміру рівня сигналу (БВРС), що виставить рівень граничного детектора (ГД) на вимірювану величину при надходженні команди від керуючого пристрою (КП). Керує цим оператор, що проводить виявлення. Видно, що реєстрація випромінювання диктофона в такому приладі можлива тільки, якщо це випромінювання більше рівня фону в даному місці. Відповідно реальна дальність виявлення тепер сильно залежить від рівня фону і може впасти в кілька разів. Це фізичне обмеження для широкосмугових детекторів. По такому принципу побудований канал виявлення аудіо і відео записуючої апаратури в приладі ST 041, що випускається фірмою “Смерш Техникс” (Санкт-Петербург).
Розглянемо шляхи підвищення ефективності цього приладу. Для цього потрібно вирішити, як мінімум, дві задачі: знизити власний шум приладу і намагатися розрізнити джерела електромагнітного поля по частоті. Власний шум пристрою, розглянутого вище, визначався шумовими характеристиками мікросхеми підсилювача і шириною частотного діапазону виміру. Звідси випливає, що зменшення частотної смуги приведе до зменшення власного шуму виявника. Ця задача вирішується шляхом використання групи смугових фільтрів, що перекривають частотний діапазон, який нас цікавить. Збільшення числа фільтрів приводить до покращення співвідношення сигнал/шум. Крім того, ці ж фільтри вирішують і другу задачу - дозволяють локалізувати сигнал по частоті. В результаті, у приладу з’являється здатність “бачити” дуже слабкі джерела електромагнітного випромінювання на фоні дуже сильних, що абсолютно неможливо для широкосмугового детектора. На цій основі побудований інший прилад для виявлення диктофонів - ST 0110, що випускається фірмою “Смерш Техникс”. В основу приладу були закладені алгоритмічні моделі, використаних раніше в пристрої PTRD-018.
Структурна схема пристрою ST 0110 представлена на рис.2.
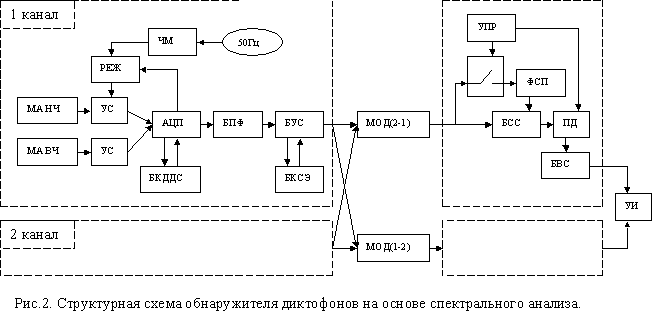
Рис. 2. Структурна схема виявника диктофонів на основі спектрального аналізу
Існує ще одна проблема, яка зв’язана з реально сильною не стаціонарністю електромагнітного поля, створеного “паразитними” віддаленими джерелами. Ці джерела можуть з’являтися і зникати, а також змінювати інтенсивність свого випромінювання зовсім хаотичним чином. Для виявника це буде аналогічно ситуації вмикання і вимикання диктофона. Вирішити це протиріччя можливо, якщо використовувати два синхронно працюючі тракти обчислень. При цьому результати цих обчислень взаємно віднімаються. В ідеальному випадку, це приведе до повного придушення впливу вилучених джерел поля. Прилад буде реагувати тільки на появу і зникнення джерела в ближній зоні, але не рівновіддалених від магнітних антен (рис.3). Радіус ближньої зони росте зі збільшенням відстані (“бази”) між магнітними антенами (МА 1, МА 2). Це відстань повинна бути порівнянна з відстанню до об’єкта, що виявляється.
Зона виявлення 1
каналу
Зона виявлення 2
каналу
Об’єкти в даній
зоні не виявляються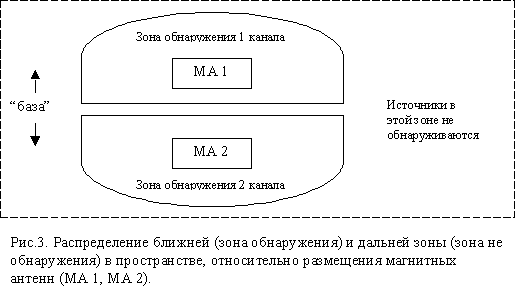
Рис. 3. Розподілення ближньої (зони виявлення ) і далекої зони (зона не виявлення ) в просторі, відносно розміщення магнітних антен (МА 1, МА 2)
Цілком вирішити проблему не стаціонарності віддалених джерел заважає не абсолютна відповідність амплітудно-частотних характеристик (АЧХ) двох синхронно працюючих трактів і не абсолютно точний збіг кута між вектором поля джерела і орієнтацією магнітних антен, а також інтерференція і відображення електромагнітних хвиль. Такого роду невідповідності приводять до необхідності деякого зменшення чутливості приладу для зменшення імовірності помилкових тривог.
Повернемося до рис.2. З метою максимального придушення впливу віддалених джерел (моніторів, телевізорів, оргтехніки та іншого устаткування) у прилад введені паралельно і синхронно працюючі тракти для першого і другого каналів. Ці канали працюють незалежно один від одного до етапу віднімання усереднених спектрів. Взаємне віднімання і наступна обробка дозволяють визначити, до якої з антен джерело розташоване ближче, тобто не втратити здатність до просторової локалізації.
Обробка сигналу в кожному каналі відбувається таким чином. Дві незалежні магнітні антени (МА НЧ і МА ВЧ) перетворять магнітну складового електромагнітного поля в електричний сигнал, що надходить у підсилювач сигналу (ПС). Смуга пропускання зв’язування низькочастотної магнітної антени і підсилювача (МА НЧ і ПС) складає 50÷400 Гц, що досить для виявлення “кінематичних” диктофонів. Як магнітну антену для цієї частотної смуги використовують градієнтометр. Смуга пропускання зв’язування високочастотної магнітної антени і підсилювача (МА ВЧ і ПС) складає 20÷120 кГц, що орієнтовано на виявлення “цифрових” диктофонів. Далі підсилені сигнали надходять на аналого-цифровий перетворювач (АЦП), переводяться в цифрову форму і всі подальші операції виконуються комп’ютером.
Дослідження показали, що результуючий динамічний діапазон виявника повинний складати більш 120 дБ. Це пов’язано, в основному, з існуванням випромінювання від мережі 220 В. Динамічний діапазон сигналів від диктофонів не перевищує 70 дБ. Знизу діапазон обмежений власними шумами виявника. Звідси виникає необхідність спробувати на початковому етапі обробки мінімізувати вплив гармонік мережі 220 В, таким чином, зменшити динамічний діапазон обчислень до 70 дБ і спростити реалізацію приладу. З цією метою апаратно реалізований гребінчастий режекторний фільтр (РЕЖ), який забезпечує придушення сигналу на частотах кратних основній гармоніці напруги мережі живлення. Рівень придушення - до 60 дБ. Через нестабільність частоти мережі, необхідний також частотомір (ЧМ), що вимірює частоту мережі 50 Гц, з точністю, необхідної для настроювання на режекцію основної гармоніки. У результаті отримана можливість використовувати АЦП із динамічним діапазоном 70 дБ і подальші обчислення вести в рамках шістнадцяти розрядних обчислень. За максимальною амплітудою сигналу стежить блок контролю динамічного діапазону сигналу (БКДДС), що видає ознаку перевантаження і забороняє подальші обчислення. Якщо оцифрований сигнал не виходить за межі динамічного діапазону АЦП, здійснюється швидке перетворення Фур’є (ШПФ), результатом якого є розкладання сигналу на гармонійні складові, що еквівалентно використанню групи смугових фільтрів. Кількість таких фільтрів обрано, виходячи з дослідження тимчасової нестабільності і частотної смуги сигналів для ряду типових диктофонів. Оптимальним виявилося по 256 гармонік для низькочастотної і високочастотної смуги. Недоліком ШПФ є так називаний ефект Гібса, що виражається в розширенні спектральних піків у нижній частині амплітудного діапазону і появі безлічі бічних пелюстків. Для зменшення бічних пелюстків, до обчислення ШПФ, на сигнал накладається вагова функція (“вікно”) Кайзера-Бесселя, що найбільш сильно придушує бічні пелюстки і дає дозвіл по частоті близько розташованих великі і малі сигнали. Наслідком цього є деяке розширення спектральних піків у верхній частині амплітудного діапазону, що може легко компенсуватися збільшенням точок Фур’є перетворення.
Після обчислення ШПФ спектр сигналу надходить в блок усереднення для придушення шумових складових у спектрі і виділення стабільних спектральних компонентів. Використано експонентне усереднення по ансамблю. Коефіцієнт усереднення вибирається експериментально, виходячи з рівня нестабільності спектральних складових сигналів тестових диктофонів. Процес усереднення контролює блок контролю спектральної енергії (БКСЕ), що блокує подальші обчислення при інтегральних спектральних сплесках для миттєвого (не усередненого) спектра вище заданого порога. Це запобігає реагуванню приладу на імпульсні перешкоди, вібрації та інші короткочасні збурювання електромагнітного поля. Далі, усереднені спектри сигналів для першого і другого каналів взаємно віднімаються по модулі в блоках МОД(2-1) і МОД(1-2), у результаті чого відбувається видалення гармонік, однакових по частоті і амплітуді. Гармоніки спектра, що залишилися, надходять у блок порівняння спектрів (БСС), де кожна гармоніка порівнюється з гармоніками спектра, що надходить від формувача спектра перешкод (ФСП). На формування результату порівняння, крім модуля різниці гармонік, впливає поведінка сусідніх гармонік спектра. Блок ФСП працює у визначені моменти по командах від блоку керування (БК), наприклад, під час адаптації до навколишньої електромагнітної обстановки. Результат порівняння спектрів надходить на граничний детектор (ГД), поріг спрацьовування якого визначає чутливість усієї системи. На завершальній стадії аналізу, результат граничного детектування піддається селекції в часі, тобто відбираються тільки ті події, тривалість яких перевищила заданий інтервал часу. Це відбувається в блоці тимчасової селекції (БТС), що дозволяє ігнорувати відносно короткі сигнали, що у цьому випадку прирівнюються до помилкового. Інтервал тимчасової селекції вибирається в межах від 30 секунд до двох хвилин. З виходу блоку тимчасової селекції (БТС) ознака виявлення диктофона надходить на пристрій індикації (ПІ). Період однократного аналізу пари каналів, в основному, визначається часом формування вибірки результатів для низькочастотного тракту (“кінематичні” диктофони) і дорівнює приблизно одній секунді. Якщо виявляти тільки “цифрові” диктофони, швидкість опитування каналів підвищується в чотири рази.