

3.3 Структурная схема и передаточная функция системы.
Составим структурную схему на основе функциональной схемы (рисунок 2) и полученных передаточных функций функциональных звеньев. Структурная схема в численном виде представлена на рисунке 3.
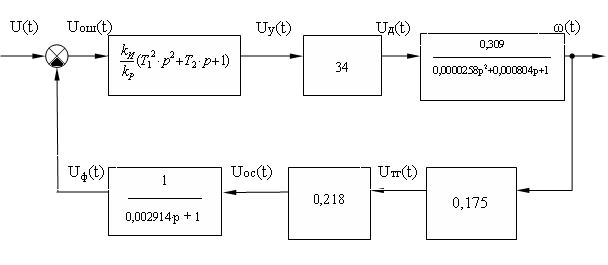
Рисунок 3. Структурная схема системы в численном виде.
Необходимо структурную схему привести к виду удобному для определения передаточных функций замкнутой и разомкнутой систем. Для этого проводится ряд преобразований, предусмотренный теорией автоматического регулирования.
Обобщённая структурная схема системы представлена на рисунке 4.
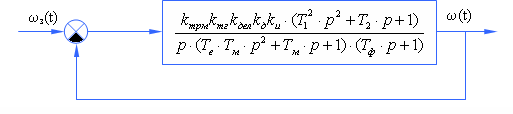
Рисунок 4
Передаточная функция разомкнутой системы W(p):

где
![]() .
.
После подстановки рассчитанных числовых параметров системы в W(p) получим:
![]()
По передаточной
функции разомкнутой системы определим
п![]() ередаточную
функцию замкнутой системы:
ередаточную
функцию замкнутой системы:
,
где А(р)- числитель передаточной функции разомкнутой системы,
В(р)- знаменатель передаточной функции разомкнутой системы,
С(р)-характеристический полином замкнутой системы,
отсюда

Тогда передаточная функция замкнутой системы в численном виде имеет следующий вид:

В этой главе исследуемая система была описана математической моделью, были получены передаточные функции для разомкнутой и для замкнутой системы.
4 Расчет настроек регулятора.
4.1 Построение логарифмических характеристик без учёта настроек регулятора.
Первым этапом является построение ЛАХ и ЛФХ системы по передаточной функции без учёта настроек регулятора.
Передаточная функция разомкнутой системы без учета параметров регулятора будет иметь следующий вид:
![]()
В данной формуле нам известны все параметры. Перепишем её в числовом виде:
![]()
Для построения ЛАХ системы нам необходимо определить характеристические точки L1(1), ω1, ω2, где ω1, и ω2 – частоты сопряжения:
![]() ,
,
![]() ,
,
![]() ,
,
где
![]() ,
откуда
,
откуда![]() и, следовательно
и, следовательно
![]() .
.
Этих точек нам будет достаточно для построения ЛАХ.
Строим низкочастотный участок ЛАХ. Он должен проходить через точку L1(1) и иметь наклон 0дБ/дек, так как система статическая (нет интегрирующих звеньев).
Начиная с частоты ω2, наклон линии увеличится на -40дБ/дек, что происходит из-за того, что начинают сказываться свойства колебательного звена.
На частоте ω1 происходит излом ещё на -20дБ/дек из-за того, что фильтр начинает оказывать на систему своё воздействие. Наклон ЛАХ становится равным -60 дБ/дек.
Уравнение для построения ЛФХ будет иметь вид:
![]() .
.
По этому выражению рассчитаем таблицу для построения ЛФХ:
Таблица 4
|
частота |
градусы |
|
0,1 |
-0,021 |
|
1 |
-0,213 |
|
2 |
-0,426 |
|
3 |
-0,639 |
|
4 |
-0,852 |
|
7 |
-1,491 |
|
10 |
-2,131 |
|
20 |
-4,266 |
|
30 |
-6,410 |
|
40 |
-8,569 |
|
70 |
-15,214 |
|
100 |
-22,428 |
|
200 |
-131,461 |
|
300 |
-210,822 |
|
400 |
-223,504 |
|
1000 |
-249,203 |
|
2000 |
-259,363 |
|
3000 |
-262,877 |
|
4000 |
-264,649 |
|
7000 |
-266,938 |
|
10000 |
-267,856 |
Видно, что при
![]() ,
,![]() .
.
По таблице строим ЛФХ. Графики ЛАХ и ЛФХ системы без учёта настроек регулятора показаны на рисунке 5 и обозначены L1(ω) и φ1(ω) соответственно.
На этом первый этап закончен.