

3.2 Описание функциональных элементов передаточными функциями.
3.2.1 Электрический двигатель постоянного тока независимого возбуждения.
Определим
передаточную функцию двигателя по
угловой скорости
![]() вала, исходя из [5]. Управление двигателем
осуществляется изменением его напряжения
питания
вала, исходя из [5]. Управление двигателем
осуществляется изменением его напряжения
питания![]() .
Для электрической цепи двигателя,
используя законы электротехники, можно
записать
.
Для электрической цепи двигателя,
используя законы электротехники, можно
записать
![]() ,
,
где
![]() - Э. Д. С. самоиндукции обмотки якоря
двигателя;
- Э. Д. С. самоиндукции обмотки якоря
двигателя;![]() - падение напряжения на сопротивлении
обмотки якоря;
- падение напряжения на сопротивлении
обмотки якоря;![]() - генераторная Э. Д. С. обмотки якоря.
- генераторная Э. Д. С. обмотки якоря.
После подстановки значений Э. Д. С. в исходное уравнение получим

где
![]() ,
,![]() -
индуктивность и сопротивление цепи
якоря;
-
индуктивность и сопротивление цепи
якоря;![]() -
ток в цепи якоря;
-
ток в цепи якоря;![]() - электрическая постоянная двигателя;
- электрическая постоянная двигателя;![]() - угловая скорость вала;
- угловая скорость вала;![]() - напряжение двигателя.
- напряжение двигателя.
Механическое движение якоря двигателя без учёта момента сопротивления, вызванного силами трения и нагрузкой на вал, можно описать уравнением
![]()
где J
– момент инерции якоря двигателя;
![]() - электромеханическая постоянная
двигателя.
- электромеханическая постоянная
двигателя.
В результате совместного рассмотрения записанных уравнений получим для двигателя исходную систему уравнений в следующем виде:

Преобразуем
полученную систему уравнений в
дифференциальное уравнение, связывающее
![]() и
и![]() :
:

или

После преобразования к операторной форме записи получаем
![]()
где
 - электрическая
постоянная времени двигателя;
- электрическая
постоянная времени двигателя;
 -
механическая постоянная времени
двигателя;
-
механическая постоянная времени
двигателя;
 -
коэффициент передачи двигателя.
-
коэффициент передачи двигателя.
На основании полученного дифференциального уравнения находим передаточную функцию двигателя:
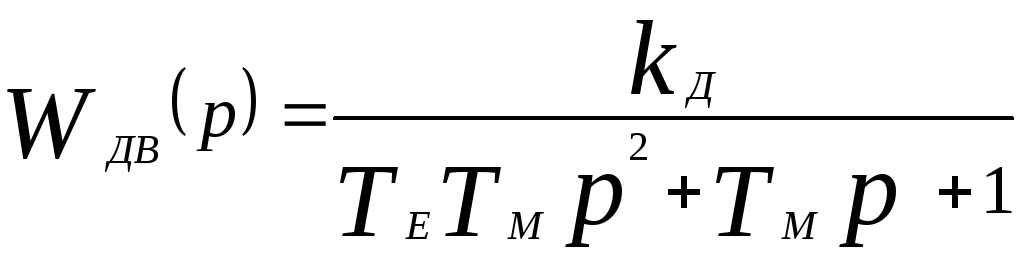 .
.
Таким образом, двигатель является колебательным звеном.
При выполнении
исследований передаточная функция
записывается в конкретном числовом
виде путём подстановки вместо величин
![]() ,
,![]() ,
,![]() их вычисленных значений. При этом
их вычисленных значений. При этом
где Мном,
Pном
– номинальные момент и мощность
двигателя;
![]() ,
,![]() - номинальные угловая скорость и частота
вращения вала двигателя;Iном
– ток якоря в номинальном режиме.
- номинальные угловая скорость и частота
вращения вала двигателя;Iном
– ток якоря в номинальном режиме.
Подсчитаем параметры передаточной функции:
Те=0,0321,
Тм=0,000804,
kД=0,309.
Тогда выражение для передаточной функции принимает вид:
![]() .
.
3.2.2 Тиристорный регулятор мощности.
Тиристорный регулятор мощности является быстродействующей электронной схемой на основе терристоров. При описании ТРМ мы можем не учитывать переходные процессы, так как они протекают очень быстро. Тогда, считая, что напряжения на входе и на выходе ТРМ связаны прямо пропорциональной зависимостью, получаем алгебраическое выражение вида:
![]()
где kТРМ – коэффициент пропорциональности.
Запишем это выражение в операторной форме:
![]()
Таким образом, мы получили описание ТРМ в виде дифференциального уравнения нулевого порядка. Следовательно, передаточную функцию ТРМ можно записать в виде
![]()
Согласно передаточной функции можно сделать вывод о том, что ТРМ – типовое безынерционное звено.
Рассчитаем kТРМ. В качестве исходных данных принимаем UД= Uном, UУ=UУmax=10В.
Подставив численные значения, получаем:
![]()
Передаточная функция тиристорного регулятора мощности:
![]()