6 Анализ качества системы регулирования……………...…………………37
6.1 Оценка качества системы по логарифмическим характеристикам......37
6.2 Оценка качества системы прямым методом по графику переходного процесса ……………………………………...................................................38
6.3 Оценка вынужденной ошибки системы………….………………..…...40
7 Синтез системы с улучшенным быстродействием....................................44
7.1 Синтез последовательного корректирующего звена...................................44
7.1.1 Построение желаемой ЛАХ и ЛАХ корректирующего звена….44
7.1.2. Реализация последовательного корректирующего звена............45
7.2 Построение переходного процесса скорректированной системы и
оценка качества системы......................................................................................48
Заключение...........................................................................................................52
Библиографический список…………………..………………………………53
Введение.
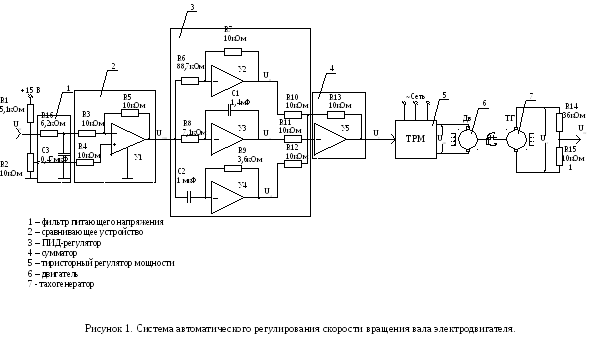
Объектом исследования в курсовой работе является автоматическая система регулирования скорости вращения вала электродвигателя постоянного тока с независимой обмоткой возбуждения. Принципиальная схема системы задана, а параметры элементов необходимо определить.
Целью работы является: исследование системы путем анализа ее устойчивости и качества, а также синтез системы с улучшенным быстродействием.
При исследовании используются методы анализа и синтеза обыкновенных линейных систем автоматического управления.
В процессе выполнения работы решаются следующие задачи:
построение математической модели системы в виде передаточной функций замкнутой системы и логарифмических частотных характеристик;
исследование устойчивости системы и приведение системы к устойчивости в случае неустойчивости исходного варианта;
исследование влияния на устойчивость системы некоторых заданных параметров путем построения ее области устойчивости в плоскости этих параметров;
построение переходного процесса в системе путем численного решения дифференциального уравнения на ЭВМ;
оценка качества системы с использованием графика переходного процесса и логарифмических частотных характеристик;
синтез последовательного корректирующего звена целью повышения быстродействия системы в 1,5 раза.
Заданные параметры системы:
Таблица 1
|
Двигатель | |||||||||
|
Тип |
Uном В |
Pном кВт |
Iном А |
nном об/мин |
nmax об/мин |
Rя Ом |
Lя мГн |
J кг·м2 |
ηном % |
|
2ПБ160М |
340 |
3,2 |
11,839 |
1000 |
2500 |
0,081 |
2,6 |
0,083 |
84 |
Таблица 2
|
Тахогенератор | |||
|
Тип |
nmax тг, об/мин |
S, В/(об/с) |
Iя, А |
|
ТГ- 041 |
3000 |
1,1 |
0,22 |
Таблица 3
|
Фильтр | |
|
R16, кОм |
C3, мкФ |
|
6,2 |
0,47 |
ηном– номинальный КПД двигателя.
Uном – номинальное значение напряжения подаваемое на обмотку возбуждения двигателя.
Pном – номинальное значение мощности которое двигатель способен отдать в нагрузку.
Iном – номинальный ток обмотки якоря двигателя.
nном– номинальные обороты двигателя.
nmax – максимальные обороты двигателя.
Rя,Lя – значения сопротивления и индуктивности якоря двигателя соответственно.
J– момент инерции вала двигателя.
nmax.тг – максимальные обороты тахогенератора.
Iя – максимальный ток тахогенератора, при котором напряжение снимаемое с его выводов будет пропорционально оборотам якоря.
S– коэффициент преобразования тахогенератора по напряжению.
С3, R16 – емкость и сопротивление электрического фильтра.