

6.3 Оценка вынужденной ошибки системы.
Определим вынужденную ошибку системы с точностью до ошибки ускорения с использованием MathCAD’а.
Передаточная функция замкнутой системы:

где

Необходимо определить замкнутую функцию передаточной системы по ошибке:
![]() .
.
Рассчитаем коэффициенты для расчета вынужденной ошибки с использованием средств решения дифференциалов в системе MathCAD:

Вынужденная ошибка:

Получим выражения для вынужденной ошибки:
![]() .
.
Статическая ошибка равна нулю, следовательно, исследуемая система является астатической.
В этой главе был произведён анализ качества системы по логарифмическим характеристикам и по переходному процессу в системе.
Полученные результаты:
tp=0,0457,
φз=82,5,

Рисунок 8. Переходный процесс системы регулирования.
7 Синтез системы с улучшенным
БЫСТРОДЕЙСТВИЕМ.
7.1 Синтез последовательного корректирующего звена.
7.1.1 Построение желаемой ЛАХ и ЛАХ корректирующего звена.
Так как длительность переходного процесса tp , связана с частотой среза:
![]() ,
,
следовательно, для уменьшения длительности в 1,5 раза нужно увеличить частоту среза исходной системы.
![]() cˉ¹,
cˉ¹,
где с3 - частота среза исходной системы
Для построения желаемой ЛАХ и ЛАХ корректирующего звена воспользуемся ЛАХ исходной настроенной системы L3(ω).
Определим границы среднечастотного участка, для чего отложим вправо от ωсж 0,8 декады – получим ω3=543рад/с.
Проводим через ωсж прямую линию с наклоном -20дБ/дек до частоты сопряжения ω3. На частоте ω3 линия терпит излом на -20дБ/дек и приобретает наклон -40дБ/дек.
В результате получаем Lж(ω) – ЛАХ системы после коррекции.
ЛАХ корректирующего звена строится путём вычитания ординат ЛАХ исходной системы L3(ω) из ординат желаемой ЛАХ. При этом необходимо учесть, что применяться будет пассивное корректирующее звено и, следовательно, его статический коэффициент передачи не может быть больше единицы Lк(ω)<0дБ. Поэтому разностная ЛАХ Lр(ω)=Lж(ω)-L3(ω) смещается вниз таким образом, чтобы её горизонтальный участок совпадал бы с осью 0дБ. В результате получается логарифмическая характеристика корректирующего звена.
Проанализируем ЛАХ корректирующего звена.
Коэффициент усиления корректирующего звена определится как:
![]() .
.
На частоте ω1 происходит излом на +20дБ/дек, что соответствует форсирующему звену с постоянной времени
![]() .
.
Затем происходит излом характеристики на -20дБ/дек на частоте ω3, что соответствует инерциальному звену с постоянной времени
![]() .
.
В результате получим передаточную функцию корректирующего звена:
![]()
![]() .
.
ЛАХ корректирующего звена и желаемая ЛАХ системы после коррекции представлены на рисунке 9.
7.1.2 Реализация последовательного корректирующего звена
Используя справочные
данные, приведенные в [1], по виду
![]() (см. рисунок 9) и передаточной функцииWk(p)
выбираем реализацию пассивного
корректирующего звена.
(см. рисунок 9) и передаточной функцииWk(p)
выбираем реализацию пассивного
корректирующего звена.
С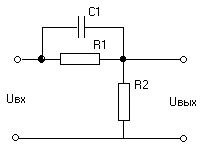 хема
выбранного пассивного корректирующего
звена приведена на рисунке 10.
хема
выбранного пассивного корректирующего
звена приведена на рисунке 10.
Рисунок 10
Это пассивное корректирующее звено, так как нет усилителей.
Используя приведенные в [2] соотношения параметров корректирующего звена, проведем расчет электронной схемы корректирующего звена (см. рисунок 10).
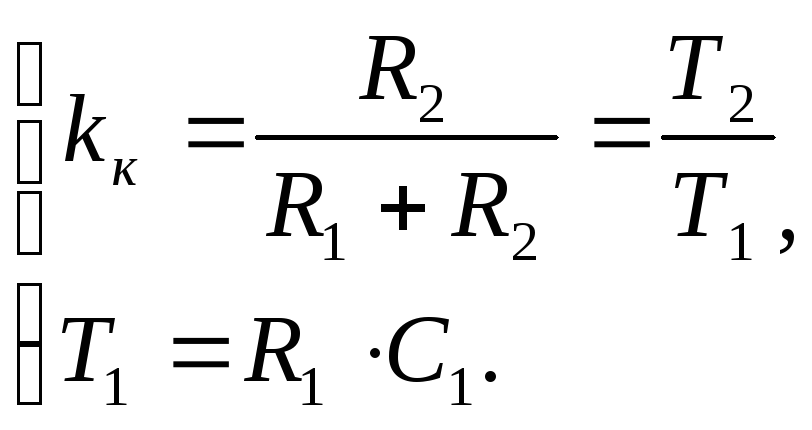
Так как эта система содержит два уравнения с тремя неизвестными, то необходимо задать один из параметров электронной схемы. Зададим значение емкости, используя стандартный ряд емкостей [4] С1=4 мФ (конденсатор типа МБГП), тогда из второго уравнения системы можно найти R1:
![]() .
.
Выразим R2 из первого уравнения системы:
![]() .
.
Из стандартного ряда сопротивлений Е192 примем R1=723 Ом, из стандартного ряда сопротивлений Е96 примем R2=1,24 кОм.
Рассчитаем реальный коэффициент усиления корректирующего звена:
![]() .
.