

1.10 Запитання для самоперевірки
1. Які зубчасті передачі називають евольвентними? Їх особливості.
2. Які кола зубчастого колеса називають основним, ділильним, початковим?
3. Що називають модулем і кроком зубчастого зачеплення?
4. Що називається коефіцієнтом перекриття?
5. Дайте визначення дуги зачеплення, лінії зачеплення.
6. Які зубчасті колеса називають нульовими?
7. Які зубчасті колеса називають коригованими? Що таке коефіцієнт зміщення?
8. Запишіть формули для обчислення міжосьової відстані пари нульових та коригованих зубчастих коліс.
9. Яке зачеплення зубчастих коліс називають рівнозміщеним, нерівнозміщеним?
10. Що називають коефіцієнтом сприйманого зсуву? Як впливає його значення на величину міжосьової відстані зубчастого зачеплення?
11. Що таке передаточне число і передаточне відношення? Як визначається знак передаточного відношення?
12. Як формулюється основна теорема зачеплення?
13. Евольвента кола та її властивості.
14. Параметри вихідного контуру зубчастої рейки.
15. Висота зубця, висота ділильної головки і ніжки зубця.
16. Поняття про кут профілю зубців і кут зачеплення.
17. Радіальний зазор і коефіцієнт радіального зазору.
18. Явища загострення, підрізання та інтерференції зубців.
19. Переваги та недоліки косозубих і шевронних зубчастих передач.
20. Що характеризує коефіцієнт питомого ковзання?
21. Як визначається передаточне відношення планетарного редуктора?
22. Сформулюйте умови співвісності, сусідства та складання.
23. Як обчислити абсолютну кутову швидкість сателіта?
24. Переваги та недоліки планетарних передач.
25. Що називають миттєвим центром обертання сателіта?
26. Радіус кривизни евольвенти на початку зачеплення, в полюсі і в кінці зачеплення.
27. Робоча ділянка лінії зачеплення і дуга зачеплення.
2 Кінематичний та силовий аналіз важільних механізмів
2.1 Проектування кінематичних схем важільних механізмів
Для
побудови кінематичної схеми механізму
в багатьох завданнях курсового проекту
виникає необхідність попередньо
визначити розміри ланок (точніше –
відстані між осями шарнірів). Вихідними
умовами для проектування (синтезу)
кінематичних схем служать структурна
схема механізму та певні додаткові дані
(наприклад, або середня швидкість![]() вихідної ланки, або коефіцієнт зміни
середньої швидкості kv
цієї ланки, або параметри, що визначають
крайні положення механізму, в деяких
випадках враховується допустиме значення
кута тиску і т. ін.).
вихідної ланки, або коефіцієнт зміни
середньої швидкості kv
цієї ланки, або параметри, що визначають
крайні положення механізму, в деяких
випадках враховується допустиме значення
кута тиску і т. ін.).
До складу багатьох машин входять такі типові важільні механізми, як: кривошипно-повзунні, кривошипно-коромислові, та кулісні. Розглянемо найбільш характерні приклади розв’язання задач синтезу таких механізмів, що зустрічаються в завданнях курсового проектування.
Синтез кривошипно-повзунного механізму
Приклад 2.1.1
Задано: середня швидкість
![]() Вср
[м/с] повзуна (рисунок 2.1); частота обертання
n1,
[хв-1]
кривошипа; співвідношення довжини (l2)
шатуна і кривошипа (l1)
-
Вср
[м/с] повзуна (рисунок 2.1); частота обертання
n1,
[хв-1]
кривошипа; співвідношення довжини (l2)
шатуна і кривошипа (l1)
-
![]() =
l2/
l1.
Необхідно визначити: l1
і
l2.
=
l2/
l1.
Необхідно визначити: l1
і
l2.
 Рисунок
2.1 – Синтез центрального кривошипно-повзунного
механізму
Рисунок
2.1 – Синтез центрального кривошипно-повзунного
механізму
Для розв’язування задачі скористаємося
залежностями. Період одного оберту
Т=60/n1 [c].
Середня швидкість
![]() В.ср
і переміщення HB
= 2l1
повзуна знаходяться в залежності
В.ср
і переміщення HB
= 2l1
повзуна знаходяться в залежності
![]() . (2.1.1)
. (2.1.1)
Отже, шукані розміри ланок:
![]() ;
;
![]() .
(2.1.2)
.
(2.1.2)
Синтез кривошипно-коромислових механізмів
Приклад 2.1.2 Вихідні
дані: довжина коромисла lСD,
два його крайніх положення визначені
кутами
![]() і
і
![]() ,
міжосьова відстань lAD
(рисунок 2.2).
Визначити: довжини кривошипа і шатуна.
,
міжосьова відстань lAD
(рисунок 2.2).
Визначити: довжини кривошипа і шатуна.
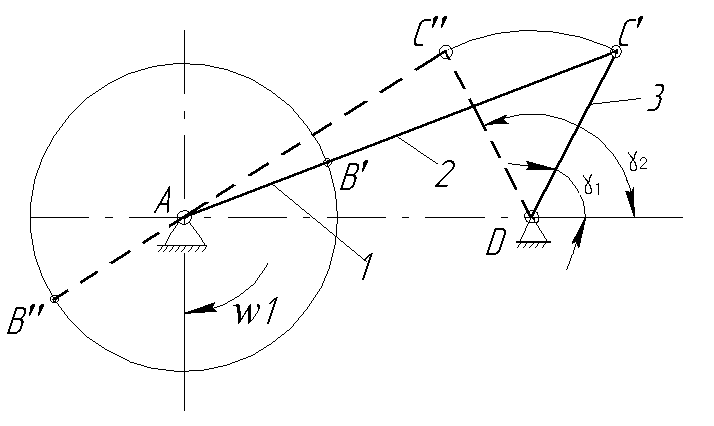 Рисунок
2.2 – Синтез кривошипно-коромислового
механізму
Рисунок
2.2 – Синтез кривошипно-коромислового
механізму
З ACD і ACD знаходимо відстані
![]() ,
(2.1.3)
,
(2.1.3)
![]() .
.
Оскільки
![]() ,
,
![]() ,
,
то ![]() ,
,
![]() .
(2.1.4)
.
(2.1.4)
Приклад 2.1.3 Вихідні дані: довжина
коромисла lCD,
два його крайніх положення за допомогою
кутів
![]() і
і
![]() (
(![]() =
=![]() -
-
![]() ),
коефіцієнт зміни середньої швидкості
k
),
коефіцієнт зміни середньої швидкості
k![]() коромисла. Визначити: lAB,
lBC,
lDA,
(рисунок 2.3).
коромисла. Визначити: lAB,
lBC,
lDA,
(рисунок 2.3).
Відношення середніх швидкостей робочого і холостого ходів називають коефіцієнтом зміни середньої швидкості вихідної ланки:
![]() ,
(2.1.5)
,
(2.1.5)
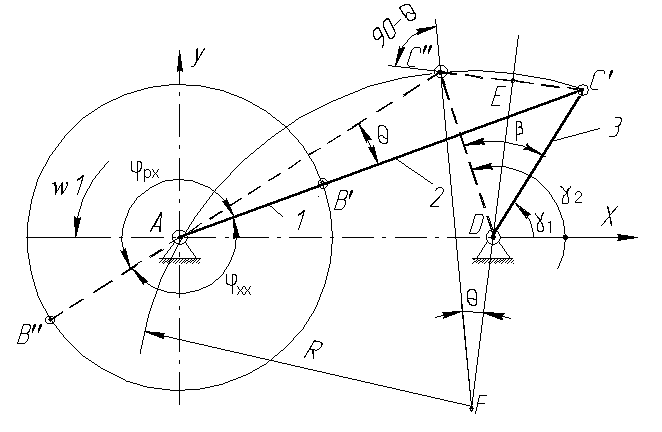
Рисунок 2.3 – Синтез кривошипно-коромислового механізму
де tхх, tрх, - час відповідно холостого і робочого ходу механізму;
![]() ,
,
![]() - кути повороту кривошипа, які відповідають
холостому і робочому ходам механізму.
- кути повороту кривошипа, які відповідають
холостому і робочому ходам механізму.
Якщо коефіцієнт
![]() є заданою величиною, то при синтезі
визначають кут перекриття:
є заданою величиною, то при синтезі
визначають кут перекриття:
![]() .
(2.1.6)
.
(2.1.6)
Щоб відшукати центр обертання А
кривошипа, необхідно кутовий хід
![]() розділити прямою DE навпіл
і через точку С
провести пряму СF
під кутом
розділити прямою DE навпіл
і через точку С
провести пряму СF
під кутом
![]() до напрямку DE. Отримаємо
їх точку перетину F. Коло
радіусом lFC
=R є геометричним місцем
шуканих центрів обертання кривошипа,
оскільки в будь-якій точці цього кола
вписаний LCAC
дорівнює половині центрального
LCFC=2
до напрямку DE. Отримаємо
їх точку перетину F. Коло
радіусом lFC
=R є геометричним місцем
шуканих центрів обертання кривошипа,
оскільки в будь-якій точці цього кола
вписаний LCAC
дорівнює половині центрального
LCFC=2![]() ,
що опираються на ту ж дугу CC.
Точка А перетину вказаного кола з
віссю абсцис і є центром обертання
кривошипа.
,
що опираються на ту ж дугу CC.
Точка А перетину вказаного кола з
віссю абсцис і є центром обертання
кривошипа.
Подальше вирішення задачі зводиться до синтезу механізму за двома крайніми положеннями коромисла (див. приклад 2.1.2). Довжини кривошипа lAB і шатуна lBС знаходяться за формулами (2.1.4)